基于无人机与Photoscan软件的矿山地质环境三维立体建模及应用
2021-04-04李朋伟王雁林徐友宁
李朋伟,王雁林,2,徐友宁
(1.长安大学地质工程与测绘学院,陕西 西安 710054;2.陕西省自然资源厅,陕西 西安 710082;3.中国地质调查局西安地质调查中心,陕西 西安 710016)
“两山”理论是习近平总书记提出的“绿水青山就是金山银山”科学论断的简称。“两山”理论所昭示的人与自然、生态与经济的关系,为我们从生态文化角度重新审视生态文明建设提供了新视角。随着“两山”理论的推行和实践,矿山地质环境防治工作愈发重要。而在矿山地质环境工作中,无人机的发展在技术层面具有十分重要的推动作用。
近十年来,小型无人机发展日新月异,国内出现了大量的民用小型无人机公司,无人机产业踏上了快速发展轨道。小型无人机遥感技术因其成本低、操作灵活便利等优点,在地质调查中的作用愈来愈重要[1]。无人机技术可以为矿山地质工作提供丰富的数据资料,众多工作者对无人机技术在矿山领域的应用做了探索。赵星涛等[2]使用无人机低空航摄对矿山地质灾害做了探测方法研究;周文生等[3]用无人机结合人工目视解译的方式统计了宁东能源基地羊场湾煤矿的矿山地质环境问题分布特征;张永庭等[4]使用无人机机载Lidar技术对马莲台煤矿进行了采煤沉陷量监测,平均误差0.043 4 m。
目前无人机的应用已从二维影像阶段进入三维立体阶段。基于无人机的三维建模软件有很多,从运算方式上区分主要有两大类:第一类为个人PC运算软件,如Smart3D、OpenDroneMap、Pix4Dmapper、Agisoft Photoscan、Datumate等;第二类为云端运算软件,如Altizure、Skycatch、DroneDeploy等。部分工作者已采用无人机立体建模方法开展了矿山地质环境方面的探索。王耿明等[5]基于无人机和Smart3D软件建立实景三维模型对新丰铁帽顶铁矿矿山地质环境进行了监测;张中雷等[6]使用无人机与Pix4Dmapper软件对舟山露天采石矿山进行了实景建模并对模型在生产调度中的应用做了研究。王宁娜等[7]使用无人机与Smart3D软件建立三维模型对广西某稀土矿进行了矿山地质环境恢复治理评价。
相比于其他软件一定的版权保护费用、云端生成模型的速度受制于网络带宽等限制条件,Photoscan软件可以在本地终端处理数据生成模型,且是半开源的模型。Photoscan软件基于影像自动生成高质量三维模型,无需设置初始值,无需相机检校,它根据最新的多视图三维重建技术,可以对任意照片进行处理,无需控制点,也可以通过给予的控制点生成真实坐标的三维模型。
NIETHAMMER等[8]曾使用无人机与Photoscan软件来建立立体模型应用于滑坡分析;缪盾等[9]应用Photoscan软件建立了亭子立体模型,并进行了精度研究,验证了百幅以内的图像建模误差在1 cm以内;李涛[10]进行了Photoscan软件地理建模的精度研究,经剖析该模型可满足1∶500复杂地形测量要求。目前,在矿山地质环境领域尚无小型无人机与Photoscan软件的三维建模与应用的案例。
本文采用大疆小型四旋翼无人机与开源版本的Photoscan软件(1.4.3版本)结合的方法建立实景三维模型,调查并定量化研究了羊场湾一分矿南部约1 km2的矿山地质环境问题,最终分析并确立了此方法的可实行性、便捷性、低成本性等特点。该立体建模方法可为矿山地质环境调查评价提供一种新的手段,丰富和发展矿山地质环境调查评价手段。
1 研究区概况
宁东能源化工基地(以下简称“基地”)位于宁夏自治区的灵武市、盐池县等地,东西宽16~41 km,南北长127 km,总面积约3 500 km2,由横城矿区、韦州矿区、灵武矿区、鸳鸯湖矿区、马家滩矿区、积家井矿区、萌城矿区、石沟驿井田组成,包括7个矿区、21个井田和1个独立井田[11]。
基地北临毛乌素沙地南缘,南接黄土丘陵北界,地貌主要由剥蚀残山、黄土梁、坳谷洼地、半固定沙丘组成,大部分地区土地利用类型为荒漠型草地。基地属中温带干旱半荒漠气候区,干燥少雨、蒸发量大、水资源缺乏,水系多为季节性洪流冲沟。地表主要有西天河、边沟、苦水河等河流,都表现出径流量小且矿化度高的特征,无法有效利用。土壤类型以淡灰钙土和风沙土为主,区域生物量低、植被恢复困难,多以草原带沙生植被为主。
2000年后煤炭资源不断加大开发规模,各矿区均不同程度地出现了地裂缝、地面塌陷和煤矸石占压土地等矿山地质环境问题,以及河道采砂、洗煤厂污染水土环境、地表植被退化、水土流失等生态环境问题。持续开发对土地利用类型和植被类型产生了明显的影响[12]。调查羊场湾煤矿地下综采导致的矿山地质环境问题,其一分矿南部约1 km2区域内煤矸石山、地裂缝、地面沉陷等问题较为突出,在成图与立体模型上效果较为明显,故选该区域作为方法试验区。
2 研究方法
2.1 无人机航拍照片获取
首先,进行实地踏勘与无人机追寻进行定性定位调查,确定建模范围。然后使用无人机获取建模范围实景影像,航拍时需要依次进行航线规划、地面控制点布设、选择航飞模式等步骤,如图1所示。

图1 无人机航拍照片流程Fig.1 Process of UAV aerial photo
航线的规划应稍微超出研究区域范围且具有较高的重叠度(超过70%),以确保数据获取的完整性。地面控制点布设要尽量均匀而且确保坐标精准。检查飞行质量时注重影像的清晰度,筛除不利于成形的曝光、小角度的拍摄照片等(因拍摄角度使研究范围面积占比小于三分之一),若素材不够应重新进行航拍。摄取时充分覆盖测区范围,尽量摄取不同高度、远近的影像,并根据范围大小选择性布设地面控制点。本文使用的无人机为小型四旋翼无人机且应具有GPS模块。
2.2 实景三维模型建立
对摄取的数据采用Photoscan软件处理建立模型。Photoscan软件处理流程以无人机航拍数据环节作为起点,在照片满足应用要求的前提下进行排列计算对齐,照片对齐后生成密集点云,在点云的基础上建立立体模型、DOM和DEM。Photoscan软件的整个工作流程无论是影像定向还是三维模型重建过程都是高度自动化的,十分便捷易于上手,其工作流程如图2所示。对于已经建立的实景立体模型、DEM和DOM,通过目视解译和Photoscan软件中的测量功能可以评价并定量化分析部分矿山地质环境问题。

图2 Photoscan软件数据处理与模型建立流程图Fig.2 Flowchart of data processing and model buildingof photoscan software
3 应用案例
3.1 数据采集与处理
本次使用的无人机型号为大疆Phantom 4 Advanced,飞行器与相机模块参数见表1。无人机航行路线重叠率80%,最大相对飞行高度300 m,航拍线路如图3中带箭头虚线所示。无人机拍摄照片共373张图片,通过筛选不利于建模的照片后留下353张照片,建立立体模型如图4所示。 本次航拍用时近1 h,后期软件建模耗时3 h,电脑主要配置可供参考:CPU i5-8600、内存8 G、显卡GTX1060 3 G。

图3 航拍线路布设Fig.3 Layout of aerial circuit

图4 三维立体模型Fig.4 Three-dimensional model
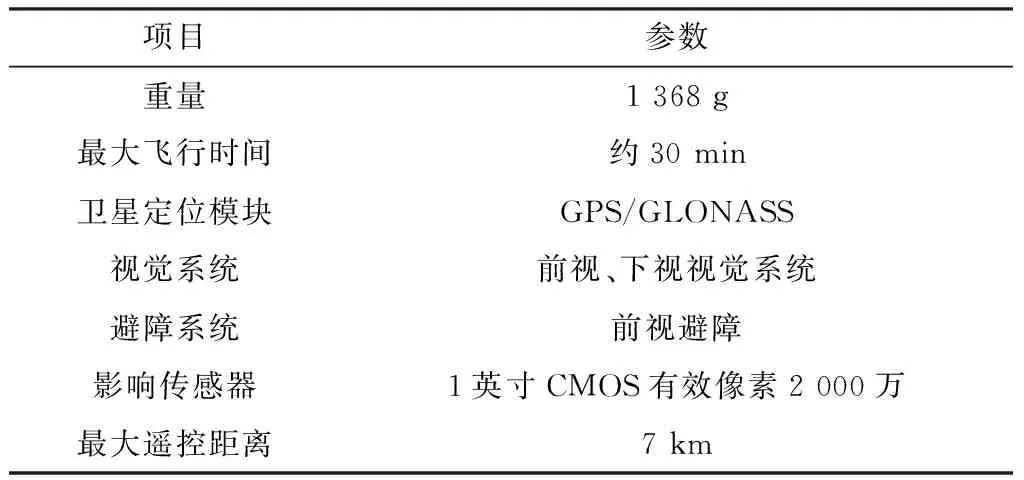
表1 大疆Phantom 4 Advanced无人机参数Table 1 Parameters of DJI Phantom 4 Advanced UAV
3.2 精度分析
根据地面显著标识物,区域内控制点一共设立10个(其中4个为测量地裂缝并与模型测量作对比),校验点设立8个记为PX并提前记录坐标。照片对齐优化后生成密集点云,根据点云与控制点成立立体模型后,取8个校验点的记录坐标与模型读取坐标进行精度对比。
点误差统计见表2,结果显示校验点位平面中误差为0.63 m,高程中误差为0.15 m,误差相比机载RTK和机载Lidar技术较大。点误差相对稳定,推测线误差与面积误差随数值增大而减小。根据点位实测值和模型读取值,分别取12条直线与三角形区域,按数值从小到大排列分别命名为LX、SX统计相对误差见图5,可见相对误差随数值增大而减小的趋势。其中最小线段L1长198.62 m,相对误差0.5%,最小区域S1面积2 867.54 m2,相对误差0.9%。通过误差分析可见该模型点精度较低,但长度与面积的计算精度较高且相对误差均小于1%,同时相对误差随数值增大而降低。
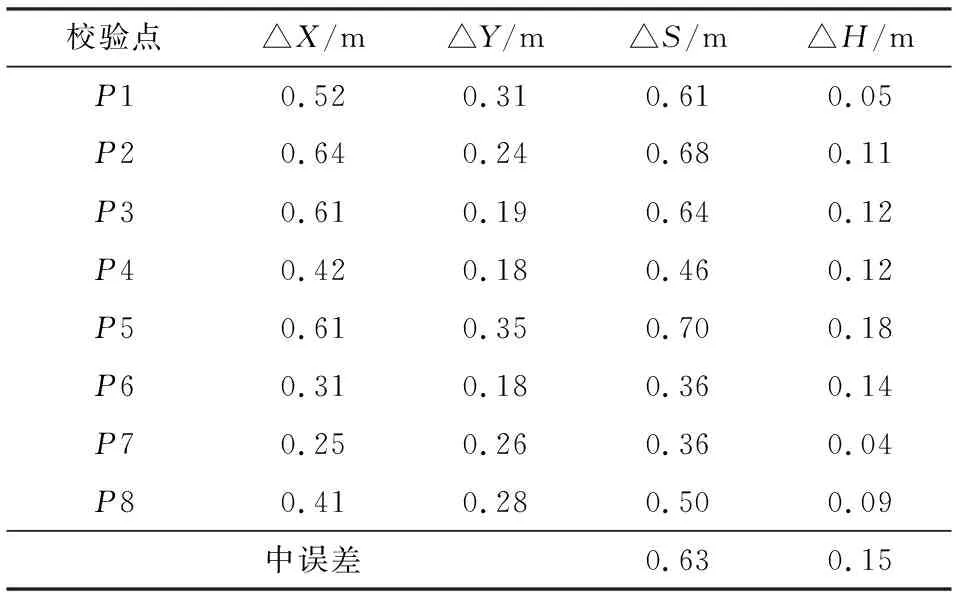
表2 校验点误差Table 2 Checkpoint error
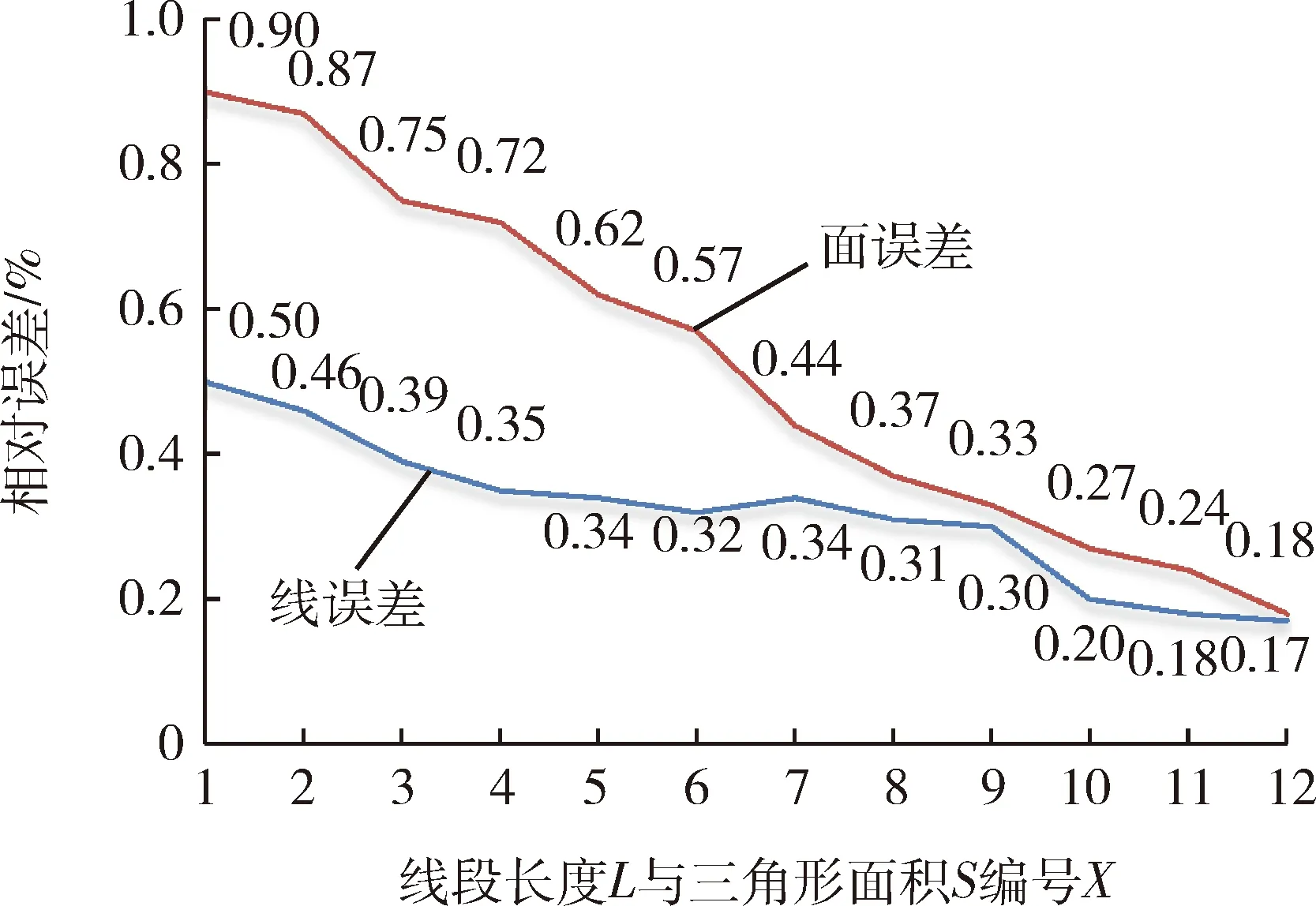
图5 线段与面积相对误差折线图Fig.5 Lline chart of line and area relative error
3.3 矿山地质环境问题
煤炭资源的开发利用过程中,通常伴随着地质灾害、水文条件变化、弃渣侵占土地等一系列的矿山地质环境问题。宁东能源化工基地近年来矿产资源生产活动加大,地下综合机械化采煤导致了大面积的矿山地质环境问题。选定的羊场湾煤矿研究区范围内矿山地质环境问题主要有地质灾害(地裂缝、地面沉陷)和弃渣侵占土地,下面以无人机和Photoscan软件建立的三维立体模型对研究区范围内的矿山地质问题进行分析。
3.3.1 煤矸石堆场
煤矸石是煤炭开采与加工过程中产生的固体废弃物,其堆放不仅压占大量土地,且易造成大气、水、土壤等生态环境破坏[13]。羊场湾煤矿存在许多露天煤矸石堆场,野外调查显示均位于矿区附近,在研究区范围内亦发现有典型煤矸石堆场。利用建立的三维立体模型生成DOM如图6所示,在DOM中可以清晰地观察到研究区范围内的所有煤矸石堆场并在图中圈定出来。
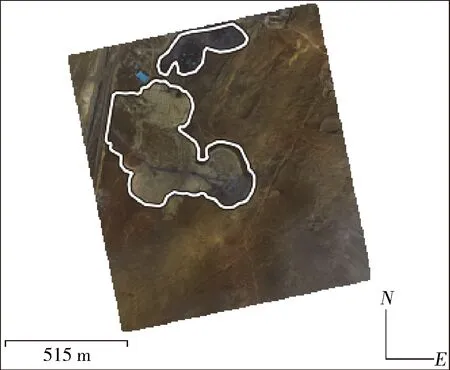
图6 DOM中矸石堆范围Fig.6 Range of vermiculite and slag heap in DOM
圈定范围后可以直观地观察到煤矸石堆场对周边环境影响与治理情况,然后利用Photoscan软件的测量功能读取煤矸石堆场的面积和体积。煤矸石堆场的治理通常有覆土、植被绿化等复垦手段,并经常交叉运用。可观察出该煤矸石堆场紧靠公路且规模较大,侵占大量土地,周围植被稀少。煤矸石堆场较新,仍有部分运矸车辆从西侧进入矸石场作业,西部区域与中部区域已经覆土,东南部分区域还在新堆积且矸石场整体植被覆盖度低。模型截图和测量(过程见图7)得出压占面积约0.23 km2,堆积体积约1.27×106m3。

图7 土地压占面积、体积数据读取Fig.7 Reading of land pressure area and volume data
3.3.2 地裂缝
地裂缝是矿产资源开发过程中常伴生的地质灾害,受自然条件与地下综合机械化煤炭资源开采影响,研究区产生一条明显的地裂缝,为东北-西南向,呈直线形并在西南末端发生弯折。通过立体模型生成DOM后,可以显著观察到地裂缝的影响并测量其相关参数(图8)。

图8 DOM中地裂缝测量Fig.8 Ground fissure measurement in DOM
在DOM模型中能观察其全貌,该地裂缝形态极为突出,颜色较周围更深,且裂缝多有中断,在DEM模型(图9)中仅能看到隐约轮廓。 通过Photoscan软件测量读取该地裂缝的走向为32°、长度775.564 m,最大宽度为2.7 m。根据7号控制点、8号控制点、9号控制点和10号控制点距离计算该地裂缝走向32°、长度776.1 m,误差为0.536 m。通过模型放大缩小功能仔细观察其全段情况,发现该地裂缝未进行填埋等恢复措施,整个地裂缝绝大部分区域植被覆盖条件较差,判断其断裂部位为人为填埋。

图9 DEM地面沉陷区域与数据计算Fig.9 DEM ground subsidence area and data calculation
3.3.3 地面沉陷
研究区处于缓坡丘陵地区,由于长年的地下开采,地面上方的岩土体失去支撑,从而导致了地面沉陷。矿产资源开发利用中地面沉陷常与地裂缝相伴生,寻找地裂缝的同时,往往也能找到地面沉陷区域。通过DOM模型可以观察到该沉陷区域但较难观察到清晰的边界,仅能在研究区北部看到一环状区域。不过在DEM模型上可以清晰地观察到地面沉陷区域。地裂缝与沉陷区特别靠近,几乎为沉降区域的东边界,通过DEM模型可以有效地分析地面沉陷问题。模型可以确定沉陷区域的轮廓、沉陷区域的面积、区域最低点相对沉陷量。
根据DOM和DEM可以综合分析地面沉降区域的位置和轮廓,标记如图9中白色边框区域所示,并通过该软件计算面积的出环状沉陷区域面积约0.089 km2,读取最低点高度与周边平缓处高度得出地面相对沉陷量为2.6 m。
3.3.4 结果分析
建立三维立体模型后,利用Photoscan软件的实景缩放功能,可以在高分辨率的条件下显著观察到研究区内煤矸石场、地裂缝和地面沉陷的界限、形态以及对周边环境的影响和治理程度。 同时,利用模型的测量功能可以读取到面积、体积、长度等参数。
研究区内煤矸石场规模较大,总面积约0.23 km2,堆积体约1.27×106m3,压占大量土地。该堆场为新堆积成的矸石场地,仍有运矸车辆在场中作业,大部分区域覆土绿化,整体复垦程度较好;区内地裂缝长达776.1 m,无填埋等复垦措施;地面沉陷区域约0.089 km2,最低处沉陷量约2.6 m,部分区域被矸石压占,面积有所减少。羊场湾煤矿一分矿南部该1 km2区域内除煤矸石场复垦程度较好外,地裂缝和地面沉陷区域治理相对较差,应及时科学防范,采取针对性措施,进行土地复垦。
3.4 建模方法优点及可行性
综上所述,小型四旋翼无人机结合Photoscan软件的三维立体建模方法在矿山地质环境调查中应用是可行的。小型四旋翼无人机相比机载红外、机载Lidar、机载RTK等设备购置价格较低且使用与维护较为方便,同时旧版本开源的Photoscan软件可免费在公众领域获得,设备与软件使得该方法可有效地控制成本。小型四旋翼无人机操作简单易上手。Photoscan软件具有高度的自动化,只需要在软件里进行人工照片筛选和控制点导入即能建立模型。无人机航拍与建模过程只需要近4 h(该时间为笔者电脑配置所耗时间,配置已在前文中列出,数据仅有一定参考性)。相比传统测量节省了人力物力,进一步降低了成本,并体现了便捷的优点。
小型四旋翼无人机与Photoscan软件建立的模型虽然在计算方面点精度低于机载Lidar与机载RTK等高成本方法,但在线段与面积的计算上精度较高。其线段相对误差小于0.5%,面积相对误差小于1%,两者的相对误差随数值增大精度进一步降低,该方法在1 km2内可做到较高精度的测量。
4 结 论
1) 小型四旋翼无人机结合Photoscan软件建立三维立体模型的方法在矿山地质环境调查中的应用是可行的。此方法较之传统测量和机载RTK、机载Lidar等技术方法能更好地控制成本,具有便捷的优点。该方法为矿山地质环境调查提供了新的立体建模手段,
2) 结合地面控制点与无人机GPS模块在1 km2范围内可以做到较高精度的长度和面积的测量,其中长度相对误差小于0.5%,面积相对误差小于1%,随数值增大相对误差减小。构建的立体模型能够直观且较准确地定量评价矿山地质环境问题(如煤矸石堆场面积、体积;地裂缝长度、宽度;地面沉陷面积与沉陷量等)。
3) 本次研究依然有许多不足之处:首先,模型点误差相对于其他方法较高;其次,对无人机摄取图片的数量、高度、角度等方式与模型精度的相关性并没有做深入探索;最后,还有不同电脑配置的建模耗时没有做出对比,理论条件下更高配置耗时更短。
