美军有人-无人协同作战发展与趋势分析
2021-04-04蔡亚梅
蔡亚梅,宁 勇,郭 涛
(中国航天科工集团8511研究所,江苏南京 210007)
0 引言
2020年2月,波音公司和美海军成功用一架有人EA-18G“咆哮者”电子战飞机控制了2架经无人改装的“咆哮者”飞机。5月,首架“航空力量协同系统”(ATS)作战无人机原型机交付澳大利亚皇家空军(RAAF),该机将作为“忠诚僚机”与第四、第五代战斗机协同执行多种任务,这标志着向可遂行有人-无人战斗机编队或ISR任务迈出重要一步。
有人-无人协同作战是世界军事强国着眼于未来强对抗环境而探讨的全新作战样式。美国等率先进行了概念发展计划与能力试飞验证,先后提出了空间分散体系结构、空中分布式作战、海上“分布式杀伤”、陆上“狼群”分布式电子战系统等协同作战理念,主要思想是将昂贵大型装备的功能分解到大量低成本的小型平台上,并通过自主、协同等技术达到相同或更高的作战能力。空客公司在“未来空战系统”(FCAS)中还引入了“空战云”(ACC)概念,用于连接有人和无人平台,为快速协调战斗提供编组情报信息服务。
目前以美欧等国为首的军事强国已经在有人-无人协同作战方面取得了阶段性的成果,开展了多项有人-无人协同作战的项目验证。本文概述了美军典型有人-无人协同作战相关项目的进展情况,并分析了未来发展趋势。
1 有人-无人协同作战能力
有人-无人协同作战能力包括以下几个方面:
1)协同探测。利用有人-无人机的多个资源跟踪同一目标,可有效提高跟踪质量,极大增强有人-无人战斗机编队的态势感知能力。
2)协同防御。有人-无人机协同防御的最大优势在于提高了威胁告警能力。多机编队进行机载告警设备组网,对来袭导弹等威胁目标协同告警,以增强对威胁目标来袭方向、威胁程度的告警准确性。
3)协同攻击。在信息化、网络化、体系对抗环境下,有人作战飞机与UCAV联合编队系统中,有人驾驶飞机可能成为战斗中的指挥信息中心,UCAV将成为射手和弹药库。
2 美军相关项目发展
近年来,为了充分利用无人机获取作战优势,美军对有人-无人协同作战不断进行探索和验证,强调有人-无人协同作战,发展有人机控制无人机进行协同探测、协同防御、协同攻击的作战样式,提高作战能力。陆军把有人-无人编队(MUM-T)作战作为重点能力进行建设,并已取得积极进展;空军正在研究以“忠诚僚机”为代表的有人-无人机协同作战;海军陆战队计划大力发展有人-无人平台的协同能力;有人-无人编队协同作战是“第三次抵消战略”重点发展的五大技术领域之一。
美空军在《2016—2036年小型无人机系统飞行规划》中对“蜂群”、“编队”、“忠诚僚机”三种概念进行了说明和比较。图1表明MUM-T是未来改变游戏规则的概念之一。

图1 MUM-T是未来改变游戏规则的概念之一
典型项目包括空军“忠诚僚机”、陆军“无人机控制最佳角色分配管理控制系统”(SCORCH)、海军“战术管理系统项目”(TBM)、DARPA“体系集成技术与试验”(SoSITE)、“拒止环境中协同作战”(CODE)、“空战演进”项目等。
2.1 “忠诚僚机”项目
“忠诚僚机”项目由美空军研究实验室(AFRL)于2015年发起,旨在将第四代战机进行无人驾驶技术改装,并将其与第五代隐身战机配对,使第五代战机(长机)的驾驶员可以对无人机(僚机)进行控制,从而让双方的作战能力都有所加强,寻求有人-无人机编队作战的能力。
根据设想,在危险环境情况下,无人机飞在有人机的前方扮演突防角色,定位和追踪目标,从而有效保证第五代战斗机远离危险境地,避免遭受到来自对手的致命反击。必要时,无人机也能够在长机驾驶员的指令下,向目标发射弹药。图2为美空军空中优势2025“系统之系统”和“忠诚僚机”选项及成本。
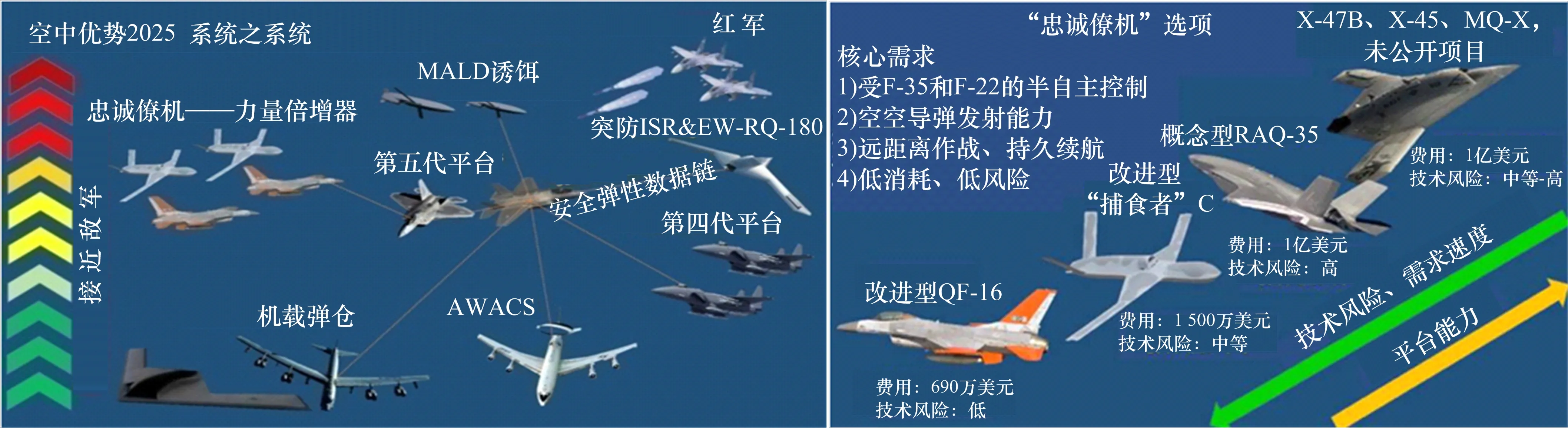
图2 美空军空中优势2025“系统之系统”和“忠诚僚机”选项
1)设计目标
“忠诚僚机”设计目标是:交付能够进行高效有人-无人机编队的灵巧自主性系统;创建能够实现任务目标的多个无人机组成的、自主协同编队;确保能够在复杂电磁环境下作战;确保系统能够在意料之外的动态环境下安全、有效运行。
2)技术目标
发展新型网络协议,以满足自主系统的网络要求;重点关注应用层、传输层和网络层上的解决方案;发展无人自主系统网络能力。
①应用层:新的应用层协议需满足自主系统的应用需求。
②传输层:在严重延迟的限制下,需具有拥挤控制的能力,最大限度地提高端对端数据传输的可靠性;在需求不同的情况下,需通过多种数据流共享资源。
③网络层:开发多径/无径路由、低开销路由和网络管理、灵活的服务和准入控制、高动态环境中的路由。
3)关键技术
关键技术领域包括:动力技术、自适应与分散式任务规划技术、传感器融合技术、作战识别技术、任务优先化与分发技术、通信适应性技术、驾驶员适用界面与工作量管理技术、拓扑结构和信息交互模式、任务结束后的人-机任务报告技术等。
4)发展历程和进度安排
2015年7月,“忠诚僚机”概念研究正式启动。同年开展了首轮演示试飞(即“海弗-空袭者I”),利用1架F-16战斗机和1架扮演无人作战飞机的F-16试验机形成长、僚机编队,完成长机指控僚机、自主编队飞行、僚机航线跟随、僚机完成长机制定的预先规划任务后,进行战斗毁伤评估、僚机重新加入编组、自动空中防撞系统等演示。
2016年3月,AFRL发起“忠诚僚机自主性测试”征询书,要求自主系统必须能够完全实现“忠诚僚机”从一个地面站出发和在完全没有专职的人员引导下,来完成所有基本的战斗操作。
2017年1月,AFRL发布“自主网络”征询书,旨在为“忠诚僚机”项目的自主系统寻求网络通讯技术,以期解决有人-无人机编队的机载联网问题。自主网络通信技术的发展,可有效满足美空军“忠诚僚机”项目对机载联网的能力需求。3月,美空军第二次成功演示有人-无人机编队,主要验证三方面能力:基于任务优先级别和现有资源自主规划和执行空地打击任务的能力;在执行空地打击任务中出现自动管理能力故障、线路偏差以及通信丢失的情况下,对多变的威胁环境做出自主反应的能力;完全兼容美空军开放式任务系统(OMS)软件集成环境,能够迅速集成多家供应商开发的软件组件。
2020年5月,首架“航空力量协同系统”(ATS)作战无人机原型机交付澳大利亚皇家空军(RAAF),该机将作为“忠诚僚机”与第四、第五代战斗机协同执行多种任务。该机的交付标志着向可遂行有人-无人战斗机编队或ISR任务迈出重要一步。
目前,AFRL正在加紧研制新的计算机算法,着手为第四代战斗机“植入”人工智能,力求让无人“战隼”完全自主地协同飞行。
AFRL计划在2020—2022财年进行无人机“忠诚僚机”项目的演示验证,展示无人机僚机如何在高对抗环境中与有人机协同作战。演示验证内容包括:一是攻击任务的演示验证,计划在2020财年进行,重点验证利用无人机投送武器,或为有人机进行目标指示;二是压制敌防空任务的演示验证,计划在2022财年利用1架真正的无人机僚机开展有人机-无人机编组打击实验,使用无人机发现、确认和定位敌方雷达,由其单独或协同进行防区内或防区外干扰,抢先发射反辐射武器或在与有人机协调后发射武器。
2.2 美陆军有人-无人协同作战项目系列
美陆军对未来作战的设想是将有人机和无人机混编,执行各种任务。先后开展了有人-无人机协同作战的一系列研究和试验,如图3所示,历经机载有人/无人系统技术(AMUST)、“猎人远距杀手”(HSKT)、VUIT2、L2MUM、BDRVT、SCORCH、SUMIT、MUMT-X等多个项目。陆军关注的实现有人-无人协同作战所需技术的三个关键领域是:1)传感器和传感器输出,为人机编队提供所必需的共享态势感知信息,包括物理和电磁环境、位置和导航数据、威胁位置和目标数据、后勤和健康状况及损伤评估;2)通信网络,以支持MUMT在士兵和机器之间及时传输信息以及处理电子干扰、敌人网络攻击及电子战;3)无人系统的认知功能。

图3 美陆军有人-无人协同作战项目发展历程
2013年8月,美陆军航空发展局启动无人机控制最佳角色分配管理控制系统(SCORCH)项目,旨在开发出一套无人机控制系统,可使空中任务指挥官同时管理多架无人机,从而在不增加操作人员工作量的情况下提高任务效率。SCORCH系统提供了一项独特的协同整合能力,将人-机互动、自主性和认知科学领域的最新技术进一步融合到一套整体的作战系统中。SCORCH系统由智能无人机自主行为软件和高级用户界面组成,系统界面针对多架无人机控制进行了优化,设有具备触摸屏交互功能的玻璃座舱、一个配备专用触摸显示屏的移动式游戏型手动控制器、一个辅助型目标识别系统以及其他高级特性。SCORCH系统允许一名空中任务指挥官同时有效控制3架无人机;机上任务指挥官可将控制任务委托给一架或多架无人机,并在任务达到关键决策节点时通知任务指挥官;16名陆军飞行员利用该系统完成了为期2天的训练、试验和反馈。试验结果表明,SCORCH系统在不增加指挥员工作负荷的情况下提高了陆军的态势感知能力和任务成效。
2017年11月,美陆军授予L3技术公司MUMT-X项目合同,支持美陆军“阿帕奇”有人-无人机编队拓展能力计划,如图4所示。MUMT-X计划支持有人机与无人机间的通信与数据共享,为AH-64E型战机提供了一种转型作战能力,从而较原有的无人机控制系统更稳健、轻便和经济。L3将提供经过测试验证的“阿帕奇”MUMT-X计划,支持MUMT运行及空-空-地(AAG)视距数据链路。
2020年2月,美陆军选定持久系统公司研发能实时传输信息和有人-无人编组协同作战的安全通信网络系统,为机器人和其他自主系统的“有人-无人编组作战”(MUM-T)提供“功能强大、安全可靠、高流通量的通信网络”系统,将情报、监视与侦察任务集成到传统作战支援行动中。该网络系统有助于陆军推进新一代“可选载人战车”与4辆无人遥控战车结合。

图4 MUMT-X将装备美陆军“阿帕奇”V(6)
2.3 美海军战术管理系统项目(TBM)
该项目是由美海军研究实验室(NRL)研发的一项采用人工智能技术的软件系统。在模拟的超视距空战任务中,系统采用智能体引导有人机-无人机编组的无人“僚机”,旨在实现有人机飞行员对无人机编队的控制,简化无人机和有人机的协同作战控制。
战术管理系统项目(TBM)主要构成因素包括目标推理、计划、行为识别和预测等,核心部件为行为识别器、计划执行预测器和计划器组件,通过组件之间的规划协作执行主动行为识别。图5显示了战术管理系统项目(TBM)的高级构架,TBM通过抽象接口从空战模拟器接收原始的不完美状态信息,原始数据由图5中的“知识边缘更新器”处理加工,解析相关的状态信息并填补系统知识中可能存在的空白。

图5 战术管理系统项目(TBM)高级架构图
2.4 DARPA体系集成技术和试验(SoSITE)项目
2014年5月,DARPA发布体系集成技术和试验(SoSITE)项目指南,寻求开发并实现用于新技术快速集成的系统架构概念,其目标是探索一种更新的、更灵活的方式,将单个武器系统的能力分散到多个有人/无人/武器平台上,即通过开展分布式航空作战体系架构研究,保持美国在竞争环境下的空中优势,发展能够快速集成任务系统/模块到体系的技术,研究验证体系对抗的有效性以及体系架构的稳定性。
SoSITE项目将利用现有航空系统的能力,使用开放系统架构方法在各种有人和无人平台上分散关键的任务功能,如电子战、传感器、武器、战争管理、定位导航和授时以及数据/通信数据链等,并为这些可互换的任务模块和平台提供统一标准和工具,如有需要可以进行快速的升级和替换,从而降低全新航空系统的研发成本和周期,并使得美军运用新技术的能力远快于竞争对手。图6为SOSITE作战示意图。

图6 SoSITE作战示意图
2020年计划内容:部署STITCHES(System of Systems Technology Integration Tool Chain for Heterogeneous Electronic Systems)集成技术;完成工具链升级;进行系统之系统结构现场飞行试验;设计体系结构联盟,规划与国外合作者之间的集成。
2021年计划内容:为美空军和美海军进行现场飞行试验;建立并部署STITCHES训练软件;把SOSITE STITCHES工具链交付给美空军和海军。
2.5 DARPA“拒止环境中的协同作战”(CODE)项目
“拒止环境中的协同作战”项目于2014年提出,旨在通过有人机指挥侦察和攻击无人机(UAV)在电子干扰、通信降级以及其他恶劣运行环境中,进行侦察监视、火力打击、电子对抗、中继通信等任务分配与自主协同,共同完成作战任务,提升体系作战能力,图7为CODE作战示意图。CODE无人机群在执行任务的过程中可以相互或向指挥官分享数据,共同协商任务分配,实现行动同步。CODE项目特别注重协同自主领域技术的提升,使得无人机组可以在一个操作人员的管理下协同工作。无人机将不断判断其自身和周边环境,并为任务操作者反馈无人机组行动建议。操作者可以允许、不允许或让无人机组收集更多数据。采用CODE技术的无人机将可发现目标,并根据建立的交战法则与目标交战。并在最小人员参与情况下,调用临近的采用CODE技术的无人机;适应与友军之间的摩擦或意想不到的敌方威胁等突发情况。
该项目共分三个阶段,进展顺利,第三阶段已于2018年底结束。2019年4月,美军使用6架“虎鲨”和14架“幽灵”无人机在亚利桑那州陆军尤马试验场进行了一次模拟演习,旨在训练无人机在缺乏现代通信基础设施的情况下如何协同作战。

图7 CODE项目作战示意图
2.6 DARPA“空战演进”项目
2019年5月,DARPA宣布启动“空战演进”(ACE)项目,目标是使飞行员能够在其飞机和无人机小组成员攻击敌机和地面目标的同时,执行广泛的全球空中指挥任务。寻求在复杂的空战机动中更多地依赖人工智能(AI)和机器自主,包括有人驾驶飞机和无人战斗机(UAV);开发使能技术,在各种作战场景中增强有人和无人战斗机的协作。“空战演进”(ACE)将让人类飞行员处理复杂的工作,如制定总体交战战略、选择目标和选择武器,并使无人战斗机能够处理飞机的机动和交战战术。然而,要实现这一点,人类飞行员必须能够信任他的无人僚机,在敌人处于可视范围内的情况下执行像格斗之类的复杂战术。
ACE项目是DARPA战略技术办公室(STO)为了实现其新型作战概念——“马赛克战”(Mosaic Warfare)而开展的项目之一。“马赛克战”概念利用众多动态、协同、高度自主的可组合系统开展网络化作战。
ACE项目主要解决4个方面的技术挑战:为局部(个人和团队战术)行为建立战斗自主性;建立和校准对空战局部行为的信任;将战斗自主性性能和信任扩展到全局(异构多机)行为;建立全面的空战实验基础设施。该项目将自动空中格斗的战术应用到更复杂的、异构的、多飞机的战役级模拟场景,为未来实时、战役级的“马赛克战”试验奠定基础。图8为ACE功能。
该项目分三个阶段:第一阶段(18个月)的重点是在模拟和仿真环境中开发和验证关键能力;第二阶段(16个月)和第三阶段(16个月)将分别在小型飞行器和全尺寸飞行器中进行相同任务。
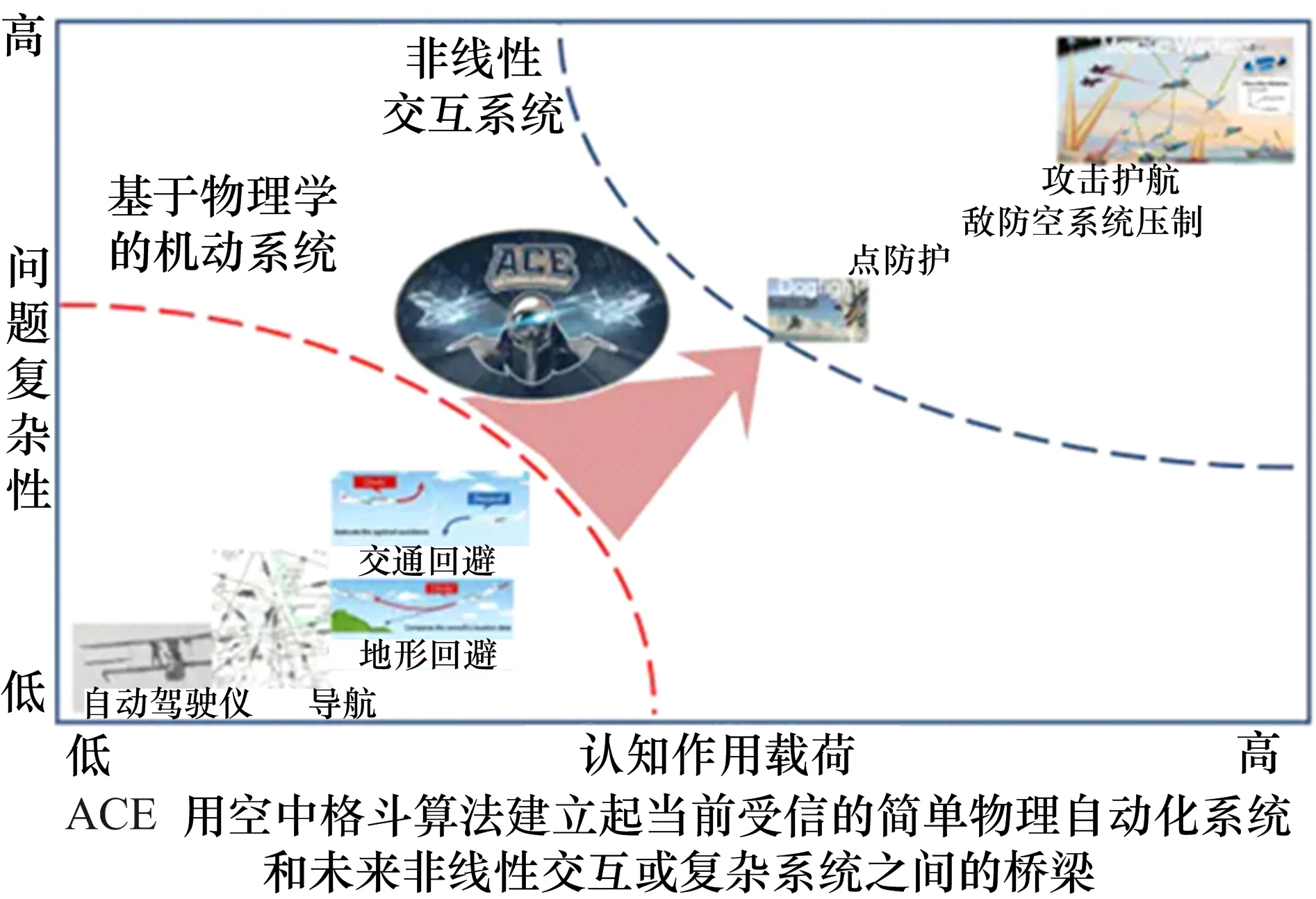
图8 ACE功能
3 发展趋势分析
1)有人-无人协同作战是未来强敌体系作战的必然发展趋势。
从以美国为首的军事强国近年来提出军事体系作战理念(多域战、马赛克战、全域战等等)以及进行协同作战列项深入研究来看,有人-无人协同作战是作战力量的倍增器,是未来强敌体系作战的必然发展趋势。美军空中系统编队发展路线如图9所示,美空军作战实验室对有人-无人机智能协同作战能力的评估结论是:完成战术侦察任务所需的时间缩短10%;识别和上报高价值目标的数量增加15%;提供给指挥官的关键信息增加了30%。有人-无人智能协同作战所具备的巨大潜能必将大大提升未来体系作战效能。

图9 美军空中系统编队发展路线图
2)随着深度学习、模式识别、脑科学等人工智能技术的突破性进展,有人-无人协同作战将向更为先进的编队作战发展。
随着深度学习、模式识别、脑科学等人工智能技术的突破性进展,随着自主技术的不断发展,要实现无人机完全自主作战需要具备复杂战场环境理解能力、战场态势综合分析与判断能力、对手和目标战术意图的预估、及时响应能力以及面对意外事件的处理等智能化能力,未来将推动有人-无人协同作战向更为先进的编队协同作战方向发展,其趋势如图10所示。
4 结束语

图10 协同作战发展趋势
本文介绍并分析了美军有人-无人协同作战的发展概况。着眼于未来强对抗环境,各军事强国都在关注有人-无人机协同作战样式的研发,不断推出新理念、新项目,不断进行演示验证工作,且已取得阶段性成果。应进一步加强以下几方面的研究:加强有人-无人协同的顶层规划和体系构建,利用人的决策优势更好发挥无人作战平台特点,实现整体作战效能最大化,成为今后一个时期内比较现实可行的空中作战方式;突破平台、链路通信、指挥控制以及传感器协同等关键技术的研发,在无人机与有人机共用空域的基础上,先突破有人-无人机编队基础问题,在解决编队生存性的同时,通过一系列项目,突破通用数据链、指挥控制架构等关键技术,增强任务效能,然后集成验证;加强对抗措施研究。随着有人-无人协同作战的顺利进展,加强对抗措施研究,以提升防空体系自卫能力。
