基于弓网接触力优化的主动控制式受电弓研究及设计
2021-04-02孙云嵩郭瑾玉历洋
孙云嵩 郭瑾玉 历洋


摘要:为改善高速动车组用受电弓弓网受流质量,提出并设计了一种基于弓网接触力优化的主动控制式气囊受电弓,该受电弓通过在线调节气囊气压,提高了弓网受流稳定性。
关键词:受电弓;气囊;弓网接触力;主动控制
0 引言
受电弓-接触网系统的受流性能是高速动车组的关键技术之一。随着速度的提高,弓网接触力波动加剧,仅从弓网系统参数的优化方面考虑提高受流质量效果不明显,因此,高速受电弓的主动控制是解决和改善高速弓网受流问题的重要方法[1]。
1 弓网接触力的调整
1.1 弓网接触力
列车运行速度对弓网动态性能有直接作用,随着速度的提高,弓网接触力波动幅度明显增加,接触力的最小值降低,受电弓的离线率增大,火花率也随之增加[2-3]。
接触力的值随受电弓和接触网的系统组合变化而变化。当接触力的值被用于定义受流时,平均接触力、接触力的标准偏差、最大接触力、最小接触力是受流质量的准则。具体如下[4]:
高速动车组的弓网接触力主要包含三部分[5-9]:(1)受电弓静态接触力(与气囊充气后产生的升弓力矩有关);(2)空气抬升力(与运行速度、受电弓开闭口等有关);(3)弓网动态力(与受电弓结构及弓网耦合有关)。
1.2 气囊式受电弓的弓网接触力调整
由式(6)可知,在一定速度下,静态接触力Fj与空气动力Fk不变,弓网接触力的变化主要是由弓网动态力P引起的。当弓网动态力P引起弓网接触力F为0或者负值时,受电弓极易离线并产生火花,降低受流质量,甚至造成受流质量不满足标准要求。为了提高受流质量,保证弓网接触力稳定,避免受电弓离线,需要对过低的弓网接触力进行补偿。而空气动力Fk为不可控因素,弓网动态力P由受电弓结构与弓网耦合情况决定,对于既定结构受电弓,该值也不可调整。因此,可对静态接触力Fj进行补偿,以提高弓网接触力稳定性,进而提高受流质量,即:
2 主动控制式受电弓设计
2.1 基于弓网接触力优化的主动控制系统
为了实现弓网接触力的优化,即对低于设定值的实际弓网接触力进行补偿,需对受电弓的气囊气压进行实时调整。结合高速受电弓运行经验数据,各速度等级下的弓网接触力目标值如图1所示。
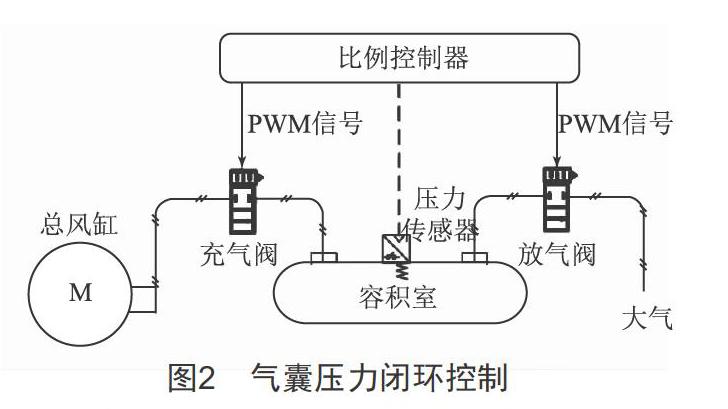
为将实际接触力调整为目标值,需对气囊压力进行调整。气囊压力调整采用闭环控制,控制原理如图2所示。根据压力传感器监测到的气路压力值与目标压力值进行比对,控制系统对充气阀与放气阀进行动作控制,如果需要补气,则充气阀开启,气路从总风缸补气提高压力;如果需要排气,则放气阀开启,将多余的气排出。当气囊压力达到预设值时,受电弓的总体弓网接触力也达到了目标接触力。
由于受电弓的空气抬升力与弓网动态力均与列车的运行速度、受电弓开闭口运行方向、受电弓安装在列车的车厢位置、列车车型、列车编组等有直接联系,因此,在接触力目标值相同的条件下,以上条件发生改变时,气囊的调整值并不相同。为了满足受电弓调试与正常运行两种情况,设定气囊的调整值的获得方法有两种:一种是通过连接调试计算机,随着车辆运行进行实时调整;另一种是通过线路试验测量后,进一步优化匹配,形成与速度、受电弓、列车等信息相关的数据并存入系统,使用时可以直接调用。因此,基于弓网接触力优化的主动控制系统总体功能如图3所示。
(1)调试。在受电弓试验及与车辆联调时连接调试计算机,以对相关数据进行读写及系统维护,正常运营时无须连接调试计算机。(2)车辆通信。基于弓网接触力优化的控制系统与车辆间采用数字信号进行通信。根据从车辆MVB通信中得到的动作命令判断受电弓是否升弓,运行速度、受电弓与列车编组信息用于控制系统选取的气囊压力调整值(正常运行情况)。控制单元需将控制系统的故障信息及版本信息等反馈给车辆,以便车辆发现受电弓故障并记录相关信息。(3)气压控制。基于弓网接触力优化的控制系统对气路单元的控制通过模拟信号进行控制。通过分析气路单元中升弓电磁阀、压力传感器、压力开关、高频电控阀、增压模块、减压模块及快排电磁阀的信息,对增压模块、减压模块及快排电磁阀进行动作控制,以达到调整气囊压力的目的。
2.2 主动控制式受电弓
结合以上控制系统,主动控制式受电弓的整体结构如图4所示。受电弓为气囊式受电弓,基本结构为四杆机构,安装于车顶。受电弓的气路气压调整单元与控制单元置于车内:受电弓控制单元可以与列车实现通信并控制气压调整,气路气压调整采用阀组集成来实现,与受电弓控制单元结构合并安装,成为主动控制单元。
3 结语
为了提高高速动车组受电弓的弓网受流质量,对受电弓弓网接触力及主动控制系统进行了研究,并设计了一种基于弓网接触力优化的气囊式主动控制受电弓,该受电弓可以调整气囊气压,进而改变弓网接触力,使高速动车组用的受电弓接触力满足设定的目标值,从而提高受电弓的受流稳定性。
[参考文献]
[1] 吴燕.高速受电弓-接触网动态性能及主动控制策略的研究[D].北京:北京交通大学,2011.
[2] 梅桂明.受电弓/接触网垂向耦合动力学研究[D].成都:西南交通大学,2001.
[3] 万嵘.弓网动态特性仿真研究[D].上海:华东交通大学,2013.
[4] 轨道交通 受流系统 受电弓与接触网相互作用准则:TB/T 3271—2011[S].
[5] 姜静,刘志刚,宋洋.考虑受电弓非线性的弓网动态特性仿真研究[J].计算机仿真,2015,32(2):170-174.
[6] 姚远,郭迪龙,姚拴宝,等.高速受电弓非定常气动特性分析[J].计算机辅助工程,2012,21(5):1-5.
[7] 周寧,张卫华.基于受电弓弹性体模型的弓网动力学分析[J].铁道学报,2009,31(6):26-32.
[8] 郭京波,杨绍普,高国生.高速机车主动控制受电弓研究[J].铁道学报,2004,26(4):41-45.
[9] 李瑞平,周宁,张卫华,等.受电弓气动抬升力计算方法与分析[J].铁道学报,2012,34(8):26-32.
[10] 蔡华.高速受电弓气动系统主动控制技术研究[D].成都:西南交通大学,2013.
收稿日期:2020-12-28
作者简介:孙云嵩(1987—),女,山东莱州人,工学硕士,工程师,研究方向:机械工程。
