Slacklining:An explanatory multi-dimensional model considering classical mechanics,biopsychosocial health and time
2021-04-02CharlesPhilipGabelBernardGuyHamidRezaMokhtariniaMarkusMelloh
Charles Philip Gabel,Bernard Guy,Hamid Reza Mokhtarinia,Markus Melloh
Charles Philip Gabel,Department of Physiotherapy,Access Physiotherapy,Coolum Beach 4573,Australia
Bernard Guy,Ecole des Mines de Saint-Etienne,Industrial and Natural Processes Division,Saint Etienne 4200,Loire,France
Hamid Reza Mokhtarinia,Department of Ergonomics,University of Social Welfare and Rehabilitation Sciences,Tehran 12345,Iran
Markus Melloh,School of Health Professions,Institute of Health Sciences,Zurich University of Applied Sciences,Winterthur 8400,Switzerland
Abstract This paper aims to overcome slacklining’s limited formulated explanatory models.Slacklining is an activity with increasing recreational use,but also has progressive adoption into prehabilitation and rehabilitation.Slacklining is achieved through self-learned strategies that optimize energy expenditure without conceding dynamic stability,during the neuromechanical action of balance retention on a tightened band.Evolved from rope-walking or‘Funambulus’,slacklining has an extensive history,yet limited and only recent published research,particularly for clinical interventions and in-depth hypothesized multi-dimensional models describing the neuromechanical control strategies.These ‘knowledge-gaps’ can be overcome by providing an,explanatory model,that evolves and progresses existing standards,and explains the broader circumstances of slacklining’s use.This model details the individual’s capacity to employ control strategies that achieve stability,functional movement and progressive technical ability.The model considers contributing entities derived from:Self-learned control of movement patterns;subjected to classical mechanical forces governed by Newton’s physical laws;influenced by biopsychosocial health factors;and within time’s multi-faceted perspectives,including as a quantified unit and as a spatial and cortical experience.Consequently,specific patient and situational uses may be initiated within the framework of evidence based medicine that ensures a multi-tiered context of slacklining applications in movement,balance and stability.Further research is required to investigate and mathematically define this proposed model and potentially enable an improved understanding of human functional movement.This will include its application in other diverse constructed and mechanical applications in varied environments,automation levels,robotics,mechatronics and artificial-intelligence factors,including machine learning related to movement phenotypes and applications.
Key Words:Slacklining;Model;Human movement;Biopsychosocial;Time
INTRODUCTION
Slacklining is a complex neuromechanical task where functional independence is achieved while dynamic stability is maintained from balance retention while treading on an unstable,three-dimensional,moveable,tightened webbing-band fixed at each end.This requires interactions between the individual’s whole-body internal dynamics that drive the response to external environmental changes[1,2].The individual adopts self-learned-strategies to ensure an optimal balance between energy expenditure and maintaining dynamic stability in the presence of perturbations[3,4].Despite its extensive historical background[5],research into slacklining models that fully define the activity are limited[6],particularly in relation to a model’s clinical rehabilitation implications and formulated explanations.This is predominantly due to incomplete descriptions of the neuromechanical control strategies not accounting for the biopsychosocial (BPS)health model or the multiplicities of time[7].This leaves ‘knowledge-gaps’ that question areas of application extrapolation and detailed explanation and an expanded and evolved model that satisfies these requirements.The model must also have potential relevance to other diverse areas like construction and mechanical engineering in varied environments including automation,robotics and artificial-intelligence (AI)driven locomotion.
Consequently,the aims of this paper are to:summarize existing slacklining models;then expand and progress these to overcome existing ‘knowledge-gaps’ that explain the broad circumstances of use,through a multi-dimensional model (MDM);for the individual’s capacity to employ control strategies that achieve functional movement and stability;and highlight potential applications to other diverse areas.
An overview of current models
Most models of self-balancing consider the duality of mathematical mechanical precision with supplementary neural control of sensory-motoric systems[3,8].However,human motion strives to be a harmonious functional movement (HFM),‘the interrelation of neural and muscular components to facilitate stable harmonized full-body functional movement’[9].Most human movement models do not consider this need for full body HFM and are generally hypothesized about a stable or fixed base.This is inadequate for slacklining where the body is dynamically coupled with external changes and response actions[1].Consequently,slacklining stability[6,10]and balancecontrol[11]is currently modelled as being achieved through:Self-learned patterns[12];encompassing neuromechanical control strategies;within a ‘saddle-shaped’ interactive 3-dimensional (3D) task space that is concave horizontal-X for the slackline,and convex laterally-Y for shift,and vertically with sag-Z)[13];with defined variables and significant degrees of freedom (DoF).These contributeviacentral nervous system(CNS) control[4]to specific movements[10]that amalgamate mobility and stability[9].
This use of classical mechanics acknowledges spatial orientation and subsequent corrective stabilization actions.This envisages a self-balancing mechanical model of an inverted pendulum (the person)[11],on a cart (the slackline),moving on an elliptical track[1](the physical 3D space movement limitations),to a maximal distance from slackline contact[3],during instantaneous stability.Concurrently,the arms and trunk are decoupled from the stance leg/s by muscular co-contraction at the hips,but dynamically direct the vector forces that enable angular momentum control[6].The forces are both pro-active and re-active to those of the slackline’s 3D reciprocal forces at and through a point/s of fixed contact[3].They form within the ‘high-dimensional manifold’ ‘… in which the subjects have to stay in order to maintain balance’[4].
However,this mechanical model has a ‘knowledge gap’ that requires evolution and expansion.It must acknowledge the framework of the BPS health model[14,15],and the multiplicity of possible time constructs[16,17].
Factors that necessitate change to existing classical mechanical models of slacklining
The summarized models of self-balance and HFM account for the available DoFs found with unpredictable dynamic movement on unstable 3D surfaces that consider both inter-segmental coordination and kinematic redundancy - summarised in a further article reviewing the literature and background to slacklining as "an integrated mathematical mechanical precision model,bound by classical mechanics equations in parity with sensory and motoric neural controls,that approximates a dynamic ‘saddlelike’ phase-space,high-dimensional manifold characterized by two internal competing manifolds of convergent and divergent motion”.
The resultant "knowledge gap” arises from the lack of additional perspectives on HFM that involves complex actions and unstable surfaces[18].These perspectives include:The BPS health model,accounting for physical,mental and social circumstances[14];and the multiple perspectives of time from the basic neurophysiological effects of aging such as neuro-motoric delay,through to concepts inspired by a qualitative understanding of relativity-theory.Time must be considered and reflected as a physical continuum with epistemological relevance[19],how it relates to individual momentary status accounting concurrently for past experience and future intentions,the transience of ‘this’ moment,and its’ interposition between external physical mechanical time and temporal internal or cortical time.By considering slacklining as a representative highly skilled and complex activity,as compared to quiet-standing,the proposed MDM can encompass both current and potential HFM situations involving equilibrium and self-balance,and their application to other diverse fields.
OVERLYING BIO-PSYCHO-SOCIAL INFLUENCE:A FURTHER DIMENSION
The BPS health model was proposed in 1977 being generally and widely preferred to the traditional ‘bio-medical model’ by virtue of its basic principles,that the individual’s dimensional BPS triad reflects a holistic organism,not isolated organs[14,20].Consequently,health,medical,and science practitioners are encouraged to adopt a holistic approach and account for individuality in personality,emotion,social situations,and environmental conditions.This has ensured greater emphasis on an empathetic and compassionate ‘person-centered diagnostic approach’[20];however,this has not fully penetrated basic science research and theory,yet.
The BPS factors contribute as a consequence of their context,setting,and the individual’s social interaction support networks[15].With slacklining,this can include prior experience,for example:Biologically - a beginnervsan expert;psychologically -positively for enjoyment,or negatively from an experienced injury when participating;and socially - the physical/psychological setting when participating[2,7].This BPS approach incorporates the reason for participating.This may be obligatory rehabilitation within a clinical setting[7,21,22],or a high-performance training institute[23],at a height or a very low line-tension which accentuate the challenge,or recreationally with friends[5].These BPS influences cast additional layers of control over the physical activity and its governance by physical laws that are not addressed in existing models.These contributors will influence subsequent learned movement patterns,so that no individual/s will adopt exactly the same movement and balance strategy at any given time point[8,9].
Criticisms of the BPS model predominate in four areas:(1) It is neither a scientific or a philosophical model;(2) Provides no answers on how a condition/disease is expressed by the three BPS components interactions;(3) Has no guidelines on when it should be applied;and (4) Recommends no definitive therapies and interventions.Noted disadvantages are that because it is multi-faceted it is complicated,making it problematic for education.It assigns no responsibilities,making it difficult to coordinate.It lacks concise theoretical framework related to content and how it functions[15].But,the BPS health model enables more effective management! It connects science and humanism by facilitating collaborations between clinicians,patients,their families,and social support systems.Consequently,it remains a valued approach offering beneficial clinical,educational,and research services,while concurrently contributing to health and medicine policy and practice formation[15].
This multi-faceted BPS approach has evolved through the introduction of:semiotics- the language allowing the description of relationships between individuals and environments;and constructivism - how organisms perceive their environments.These explain the lack of uniformity in individual reaction to any defined physical or chemical stimulus.Stimuli are “...imprinted with a meaning [and] designated as a sign(that has no actual representation)...” with the imprinting dependent on the individual’s holistic “… motives,relationship needs,metabolic conditions,thoughts,and fantasies”[20].Effectively,individuals construct their own environment and the imprinted meaning on the receptors “encompasses the individuals’ unconscious,preconscious,and conscious memories in the implicit-,the working-,and the autobiographic - memory”[20].Consequently,the two-link mechanistic model of cause and effect gains a third ‘interpretation’ stage:(1)Cause- the ‘carrier’ stimulates the receptors with a sign;(2)Interpretation- the ‘interpretant’ (the psycho-biological system developing during an individual’s ontogenesis) which imprints this stimulated receptor with a meaning,or imprinted mark,prompts the organism to interpret the sign;and (3) Effect - the ‘effect mark...impregnates” the individual’s environment[20].
The BPS model encompasses both the circumstances of ‘emotional reactions’ and‘somatic symptoms’ as it is inclusive of the individual and their existing health status.It accounts for any affecting conditions by virtue of its paradigm’s six specific supporting aspects[14]:(1) Illness based on biological changes indicate disease potential,not current circumstances;(2) Establishing relationships between physiological status and clinical presentation,both behavioral and psycho-social;(3) Living conditions significantly influence when conditions are reported and how they vary;(4) Psychosocial factors critically influence when and if individual’s allow themselves and others to view them as sick;(5) “Rational treatment” directed at biological abnormality will not restore optimal status even when the condition is alleviated and correction documented;and (6) Provider’s behavior and relationship with the individual influences the therapeutic outcome both positively and negatively.
Including BPS health as a dimensional input considers the ‘individual’ in any HFM and self-balance context.It creates an influence generally not accounted for,but required as it affects individual patterned responses as expanded upon below.
Biological contributors
The BPS modelbiologicalcontributors to HFM provide insight into movement variability within and between individual/s,with many aspects well documented for 200 years,and some for 2000 years,consequently relevant historical references are provided.Biological attributes are specifically applicable in the presence of irregular inputs,both internal (ageing,fear,pain,…),and external (weather conditions,indoorsvsoutdoors,unstable surface contact,reason/motivation for training,fun,or rehabilitation …).These inputs cause physiological,sensory,and motor processing interactions[24],with specific biological relevance to nervous system processing,neuroplasticity,and ‘reflex inhibition’ or ‘inhibition of reflexes’ related to muscle activation.
Nervous system processing
There are significant variations in tissue-specific neural conductive paths[19]and subsequent delays that affect response times[18].The CNS receives detected changes in position and orientation,and reacts in an integrated manner that maintains functional balance-control through a closed-loop feedback system with varied constraints on the sensory integration process,including "sensory weighting"[24].Changes in motor activity or movement occur after nervous system processing[12],being primordially protective or survival responses designated to prevent injury in the presence of threat by facilitating the least detrimental choice.This is achieved through behavioral organization of ‘action’ or ‘inhibition of action’[25].The individual’s response will vary in size and duration as a function of the input and individual experience[12].Subsequent changes then input to the CNS feedback-loop as multiple sensory signals,body awareness,or environmental factors that add processing,further adaptation and changes to the initial movements.These are facilitated,inhibited,or further altered...and the loop continues[26],but complexity will increase delays[6,8]unless the signals are‘packaged’ as single unit from learned response[24].However,a finite neural delay is required and determined by the brain’s ‘time available processing’[27]which is optimized during complex integrated neuro-motoric control,like slacklining.The CNS allocates ‘weights’to each sensory system’s incoming signals,to ensure each contribution is comparatively represented[28];and employs‘muscle synergies’,that combine muscle groups responses as a common neural signal that simplifies motorcontrol[29].Altered movements are essential in the early protective phase of recovery and rehabilitation,but if not modified appropriately through learned-control they lead to mal-adaptation[12].Slacklining,as a learned activity,is an explicit example and can only occur through HFM,which when achieved can override or modify the maladaptive movements.
Inhibition of reflexes and muscle activation
There is a duality in the term ‘reflex inhibition’ which describes two separate but independent centrally mediated phenomena:The ‘inhibition of a spinal reflex’ at the spinal leveli.e.,the stretch and Hoffman reflex (H-reflex);and ‘a reflex body response that causes inhibition to occur’ at the central level thereby affecting muscle activation[30,31],essentially causing arthrogenic muscle inhibition (AMI)[32,33].Both actions are reduced during slacklining due to refined or regressed levels of down regulation[7,34]from learned regulatory control of the external stimuli[23,35].This is likely from increased striatal-network efficiency[36]from the hippocampus and other‘primitive’ brain areas[18]leading to pre-synaptic inhibition in supraspinal centers.These predominantly affect reflex inhibition driven movement control[37]leading to neuroplastic change[38].
The ability to both ‘compensate for’ and ‘coordinate with’ these sensory-motoric induced physical delays and their variability[27]is influenced by integrated interplay[39].This includes “visual prediction” and motor planning,where each retains some semiautonomous compensatory control,but ostensibly under CNS hierarchical influence[18].These changes remain in constant flux dependent on the individual’s life status circumstances.Since motoric activity changes occur subsequent to CNS processing,this provides the initial opportunity for individual adaptation to afferent input,and any adaptation to movement patterns previously used.Changes in movement are essential aspects of response and experience.Their prediction cannot be only through physiological,sensory or motor considerations[26].
Other biological considerations include normal ageing and pathological declines in the body’s mechanical structures[8,40]and neural system[41]and age-associated contrasts between early and later age learning,absorption and capacity.This includes cortical,subcortical[27],and neocortical tissue[38]plus limbic hippocampal-striatal representations and information processing;all of which contribute to memory and spatial learning fluctuations and age-deteriorations[41].There is also the variable rise and ebb in white matter microstructure associated with cognition[42].These aspects are further compounded by the mental state,such as deterioration with dementia,traumatic brain injury (TBI),Alzheimer’s and Parkinson’s disease[43].They in turn contrast with the BPS health model perspectives,such as emotion,motivation and experience[15].
Neuroplasticity
Neuroplasticity is vital to this MDM of slacklining as neural tissue adaptive changes can be virtually instantaneous[44,45]or occur rapidly after a complex balance-task,like slacklining[27,46].Neuroplastic changes can also be sustained for weeks or even years[47]being task-specific[23]and functionally transferable to activities of daily living (ADL)[48].
Anatomically,neuroplastic change occurs in different cerebral structures at variable rates.The duration of sustained change depends on the tissue and cellular components[45].The triggered changes are activity-driven,rapid,and specific to dynamically regulated white matter (primarily myelinated axons which form the connections between cortico-cortical and cortico-subcortical regions and is critical for prefrontal cortex functioning)[40],and gray matter (primarily densely packed neuronal cell bodies,dendrites,and synapses)[49].However,this dichotomous classification is overly simplistic as myelin in both the white and gray matter is derived from the neuroglial cells of oligodendrocytes developing from oligodendrocyte precursor cells(OPCs).To fully appreciate how dynamic myelination influences overall nervous system function during a complex whole-body activity,like slacklining,a circuit-level approach is required with integrating analysis of myelin dynamics and direct measurement of circuit function[45].The measurable macro-level changes found with neuroplasticity,that indicate a re-sculpturing of brain structure,occur from increased underlying cellular and systems level cross-talk[36].
Neuroplastic-specific research of such changes has predominantly been on simple balance-based challenges (single-leg and tandem-standing),or dynamic (balance boards and moveable platforms)[50].However,the balance-task difficulty for such activities is notably lower than that required to achieve and maintain a stable position when slacklining,which requires complex physical,neurological and whole body involvement[35].Consequently,it can be extrapolated that changes found in simple and dynamic balance tasks will also be found in the more complex balance-task of slacklining[51].The determined neuroplastic change can be latently reflected as both sensori-motor homunculus smudging[52]and as global concurrent functional change[48].
In considering the neurophysiological basis for neuroplastic change the white matter myelin support and insulate the axons and can alter their cell numbers,length,and penetration extent into the surrounding tissue[40].They can be either modified through remodeling in situ or regenerated[49].These include variable changes[45]to composition[38],distribution,and sheath[40];the nodes of Ranvier size,length and spacing[53]which influence conduction velocity and by consequence reaction time.The gray matter neuroglial cells undergo multiple area morphological changes that include the fronto-parietal regions[47];the limbic system from the hippocampal and parahippocampus[46,50];brain visual areas,lingual and fusiform gyri[26,48];putamen and caudate nuclei that form the corpus and dorsal striatum;the cingulate gyrus and the precuneus in the superior parietal lobe and the supra-marginal gyrus[47].Consequently,with slacklining,training-induced neuroplastic brain-tissue changes are specifically demonstrated by both structural and functional magnetic resonance imaging (fMRI)[47].
Such functional and morphological changes in brain structure subsequent to a complex balance oriented motor-learning task,like slacklining,has training-effects that result in activation and alteration of the primary motor cortex (M1),pre-motor cortex(PMC),supplementary motor cortex (SMA),cerebellum,and subcortical structures[26,54].Connectivity reduces between other brain areas and the striatum during the training period,effectively increasing striatal network efficiency[47].It is recognised that the fronto-parietal brain networks are responsible for coding acquired motor skills,but this appears to be a two-stage process[55].Immediately post balance-training,functional connectivity is increased,then latently after several weeks structural changes that are induced by training can be visualized under both structural and fMRI.The task subsequently changes both the functional resting-state networks and the corresponding sub-cortical and cortical brain structures with time-related performance improvements[55].Dynamic balance motor-training sessions initiate fronto-parietal network functional connectivity increases with the white matter after 1-wk[23]which continues consistently with micro-structural alterations over 6-wk with repeated training.In contrast,grey matter alterations and functional connectivity changes in prefrontal and supplementary-motor areas peaks at 3-wk[55].
Further,at the gross structural brain-tissue level,rapid and specific M1 gray matter changes triggered by balance-specific motor learning are visualized by MRI and diffusion tensor imaging (DTI).This includes increased cortical thickness from 1-session and is independent of resting cerebral blood-flow changes and repetitive leg use[50].At the tissue and cellular level,neuronal processes re-modeling occurs at the pre-synaptic terminals that form synapses with dendritic spines.The gray matter induced changes include the SMA/pre-SMA,that reflect total dendritic spine alterations.Hence,both gray and white matter changes occur in the left anterior prefrontal lobe[56]from anatomical and functional connectionsviathe cingulum bundle causing structural brain plasticity change across the entire cerebrum.This indicates large-scale networks comprising interconnected regions are positively affected leading to functional adaptation[55].This strong systems level correlation between traininginduced functional and structural brain plasticity changes suggests intrinsic brain activity has functional relevance for human brain morphological adaptations[55].
The exact time-scales accompanying structural remodeling and neuroplastic changes from high-demand balance training are not definitive[44].The neural tissue cellular rearrangement and alteration occurs locally but at varying time-frames from activity specific stimulus[47].The changes remain in flux,responding to variable internal[49]and external functional stimuli[42,50]that requires adopting new neural and motor sequences[57].They are induced and maintained instantaneously,rapid shortterm (hours-days) to medium-term (days-weeks),or long term (months-years).
Instantaneous neuroplastic initiation of cerebral change is instigated by sensorimotor[4,44]and psycho-social inputs[46].These are assimilated by constant neural system adaptation[40]to provide solutions through new and modified pathways[45].With challenging balance and postural tasks like slacklining,supraspinal sites exhibit presynaptic inhibition rather than post-synaptic actions as a predominant adaptation[26].This is partially driven by corticospinal excitability from muscle and joint feedback that accentuates CNS modulation and corticospinal drive.This overrides pre-synaptic inhibition and enables a counteraction to the α-motoneuron inhibition[58].
With spinal ‘reflex inhibition’ the Ia afferent excitation is not fully transmitted to post-synaptic α-motoneurons which allows subsequent ‘inhibition of the spinal reflex’to occur at the spinal level,including the stretch and H-reflex[51];and a reduction in the reflex size without affecting the supraspinal input to the α-motoneuron pool.This reduced reflex size,without concurrent change to the background muscular activity,indicates modified spinal processing of afferent information[26].
Conversely,with AMI,trauma causing peripheral nociceptive afferent inputs to the CNS inhibits the α-motoneuron pool as a form of self-protection that deactivates local and stabilizing muscles,e.g.,quadriceps and multifidus[33].With ongoing neural inhibition the CNS is prevented from fully activating affected muscles[58],which if sustained becomes detrimental[12].Consequently,this form of ‘reflex inhibition’ is‘inhibition that occurs as a reflex body response’ at the central level,and is a negative adaptation,where the down-regulation effect must be inhibited to restore normal function[37].This instantaneous neuroplastic change is postulated to occur by reduced neurotransmitter release from central inhibition,which enables the Ia afferent excitation to be fully transmitted to post-synaptic α-motoneurons.This minimizes neural signal output reduction that maximizes normal supra-spinal input to the αmotoneuron pool which enables muscle activation that is otherwise dormant or ‘reflex inhibited’ from central influence[31],but does not affect ‘disuse atrophy’[33,59].
Rapid short to medium-term neuroplastic change subsequently,occurs when the brain adopts new procedural rule sequences,or memorizes cascades of new reactions or events[44].This includes:Specific memory and spatial orientation and mapping interpretation tasks,as with expert navigation[60];and motor processing with complex movements,like slacklining[4,50].These changes are in two formats:(1) Measurable neural tissue cellular rearrangement,and (2) Cellular remodeling as occurs with oligodendrocytes and OPCs[49].They occur within hours of task performance due to the necessity to achieve activities with hippocampal formation-dependent non-spatial memory components[48]that require spatial separation of the vestibular and visual processes,as non-visual-dependent spatial orientation[44].The spinal reflex reactions are strong in the initial learning stages,which creates instability that prevents control,e.g.,slacklining has uncontrolled ankle reciprocal agonist-antagonist cyclic contraction to eversion-inversion.With slackline training,learned activity has positive functional adaptation from centrally induced ‘reflex inhibition’ from reduced pre-synaptic neurotransmitter release[39]that dampens and overrides spinal reflexes.
Consequently,motor learning through complex balance training triggers neuroplastic ‘rapid and specific gray matter changes in M1’[50]exhibited as selective brain-volume changes[60]and shown on MRI and DTI[43].This includes microstructural changes in the limbic system (hippocampus and para-hippocampus)[44]and balancecontrol motor cortical effector representations of the trunk and lower limb that cause the noted increased cortical thickness.Further,they appear not to be isolated to highlevel complex movement tasks,however the degree of change and its duration of retention is[50].
Longer term change results from motor learning and adopting automated task behavior[54].The white matter myelin has increased conduction speed through new and remodeled oligodendrocytes and OPCs[45],including increasing cell size and length,and the size of and distance between nodes of Ranvier[53].For the gray matter,the motor cortex changes at multiple areas,including the effector representations primarily responsible for the trunk and lower limb[50],with increased cortical thickness and sensori-motor homunculus smudging[52].It is also postulated that changes are due to neuronal size,dendritic or axonal arborization,or neurogenesis[60].There is also reduced cortex excitability[26]with subsequently,reduced spinal reflex excitability from spinal reflex processing of afferent inputs,including the H-reflex and stretch reflex[51,61].At the macro-level,change favors:A smaller anterior hippocampal volume supported by associated reduction in the parieto-insular vestibular cortex;concurrent enlarged posterior hippocampal formation volumes and increased brain visual areas;and enlarged lingual and fusiform gyri from increased visual cue usage[48].During a training period,decreased gray matter connectivity can be shown[57]between the caudate nuclei and caudal anterior cingulate gyrus,precuneus in the superior parietal lobe,supra-marginal gyrus,and between the putamen and SMA and the supramarginal gyrus[47].
Psycho-social contributors to the bio-psycho-social effect/dimension
Psychological contributors affect an individual’s purpose for performing an activity and include expectations and self-motivation,daily life experiences,personal interactions,and stress.The social aspects include personal enjoyment,human social/technical interaction,rehabilitation,performance,and adjunct training[20].Other important psycho-social factors include poor recovery expectations,pre-traumatic and post-traumatic psychological symptoms[15],and age related change[42].
Stress occurs within the context of occupational activities of work-load requirements,multi-tasking,hazards or negative customers,for example with taxi drivers,first responders and military personnel[60].Other considerations are fatigue and sleep deprivation as with jet lag or work/life-stress related activities.These produce spatial cognitive deficits and temporal lobe atrophy from both gray and white matter differences,such as regional and total volume and neuroplastic change[45],that parallel biological causes.
In the gray matter new spatial memory and volume acquisition is influenced,particularly the anterior hippocampus,that affects processing ability[43,45].This plays a key role in slackline performance and progression within settings that are contextual,declarative,and episodic.Further,the hippocampus role in vegetative and autonomic functioning affects the secretion of multi-adrenocorticotropic hormone[62].These levels are determined by an intricate interaction and feedback system involving the hypothalamus,pituitary and adrenal (HPA) axis,all of which are directly affected by the stress response.The HPA axis is driven primarily by neural mechanisms causing glucocorticoids (GCs) secretion.These regulate hippocampal synaptic plasticity,gene expression and neuronal metabolism,which redirects’ energy resources to meet real or anticipated demand within multiple organ systems[62].These GCs cause cortisol elevation that is detectable in the plasma and saliva which,if prolonged or chronically elevated,is associated with reductions in hippocampal volume affecting spatial and hippocampal-dependent learning and memory task capacity.All forms of repeated or sustained BPS stress can lead to increased GCs and cortisol,with resultant negative hippocampus effects on learning,memory,and modified or inhibited functional activity task performance capacity.Structurally,the stress leads to hippocampus remodeling through three actions:hormonal influences (particularly estrogen in females),dendrite atrophy in the Cornu-Ammonis region,and suppression of the adjacent dentate gyrus neurogenesis of granule neurons in the hippocampus[62].
In the white matter,‘hyper-intensities’ (WMH) can be critical as these indicate reduced tissue integrity associated with reductions in cognitive domains[42].In particular,WMH affect executive function and attention,including working memory,mental flexibility,fluency,planning,set shifting,inhibition,and distinctive cognitive processes.These reduction effects are prominent with ageing and age-related disorders such as medial temporal lobe atrophy (MTA).For functional performance activities like slacklining,this significant MTA negativity reduces active ability as both MTA and periventricular hyper-intensities predict performance inhibition independently[42].
These vulnerable regions affect global reactions to repeated stress,trauma,and ageing[36].This in-turn affects capacity and progression in learning and achievement of balance activities,with slacklining as an example[50].Consequently,each individual’s circumstance will vary on each occasion of each activity due to progression/regression within their given situation;where each are in-turn affected by their level of motivation,mental functioning,and cognitive status at the time.This is definitive in explaining why psycho-social factors must be accounted for in any model of HFM,particularly with complex balance tasks like slacklining.The BPS model of health explains this phenomenon in terms of factors associated with recovery that are not biomedical[15,20].
TIME MULTIPLICITY:A CRITICAL DIMENSION OF THE MODEL
Overview of the influence of time
The multiplicity of ‘time’ is an integral dimension in any hypothetical human functional model that explains slacklining.The ‘spatial’ aspect of time remains implicit within the diverse biological movements that define slacklining.Our focus is the fundamental aspect of an identity between space and time,which facilitates consideration of a multiplicity of times.Although a unique time and a unique space may be defined by physicists for communication within social groups,in this paper the multiplicities of time are considered,and how they,each and together,are critical in affecting the MDM.
As a species,humanity has contemplated the transience of time from the perspectives of philosophers to scientists,but rarely from that of health professionals when considering movement and rehabilitation.The relevance is that time does not exist alone as an invisible substance that encapsulates everything[16],rather it has a multiplicity of forms that must be considered separately,yet concurrently integrated to explain and understand slacklining as an example of complex HFM.
Both time and space are inseparable ‘movement relations’,as designated and encouraged by the theory of relativity.Similarly,we contrast spatial relations with temporal relations,or immobility relations with mobility.From the psychological perspective of the individual’s internal-cortical time,for a human subject moving in space,future events feel closer than past events that occurred in similar time durations[63].This asymmetry is a consequence of future events approaching,whereas past events recede and provide apparent differences in the subjective experience of movement through time.This is mirrored in the physical experience of movement through space.However,if the experience is experimentally reversed,then past-future asymmetry is eliminated[63].This may indicate that during slacklining,as a complex and dynamic functional movement,the concepts of relativity theory may qualitatively apply,though conditional on being viewed from a new perspective.The quantitative assessment of this effect requires knowing the “spatial velocity of the future progression”,that takes the place of light velocity in the Lorentz transformation (a linear transformation of one coordinate system to another which is moving at constant speed relative to the other).
However,in hypothesizing a MDM of movement,the separate entities must be acknowledged and considered,yet integrated as a whole that encompasses the achievement of the final action,that of stable HFM.With the development of relativity theory,partially as a consequence of the determination of electromagnetism,the need to understand the deeper connection between space and time variables appeared.The role of different observers in relation to moving reference frames was stressed,together with the loss of absolute space and time[64].Subsequently,when extending the inspiration of relativity theory,emphasis has been placed on the constructed and conventional characteristics of time,and on the equally legitimate properties of the duality of external-physical clocks and an individual’s internal-cortical experienced time/s.This will help resolve the issues of time perception and its potential multiplicities,and how they are to be considered within this proposed MDM of slacklining[16,17].
The relevance of ‘external-physical’ time and ‘internal-cortical’ times
A duality of time is the first manifestation ofmultiplicity,being an integrated reflection of the individuals given spatial and cortical recognition[16,65].Here,‘external-physical’time,often considered as ‘true time’,is that computed by physicist’s clocks,and‘estimated’ by human subjects.‘Internal-cortical’time is that constructed within the brain and referred to as ‘perceived’ time[66].Experiments show that internal times have a direct relationship with neural connections and reflexes that provide the subsequent human pre-emptive and causative physical reactions.These include cortical integration and musculoskeletal responses that occur within quantifiable time frames.These were first measured in the 1850s[67]being described as ‘psycho-physiological time’[18],and demonstrated to vary dependent on the stimulus itself.Sound or touch propagated a neural interval of 150 ms compared to light at 200-250 ms,while other physical stimuli required longer durations,but all within the range of 100 ms-5 s[19].The early research also considered ‘internal time’ as a metaphysical contemplation[67];but stipulated a distinction between durations requiring significant computational neural processing time that occurred “unconsciously...before precepts’ emerge”,and that this did not imply that neural substrates were unrelated to consciousness[18].
Relevance of neuronal conduction and processing within times perspective
A further consideration of differentials between ‘external’ and ‘internal’ is neural transmission systems’ physiological limitations.As time-varying events occur in a physical state there are concurrent delays in the registered instantaneousvsthe external state,with discrepancies between the two perspectives[18].This is complicated further by the discreteness of the level of stimulation which determines the time delays for both neural delay and response,as there is a time differential between stimulation and a change in the target site’s neural activity[18].Furthermore,the individual’s BPS status will influence the perspectives of both cortical and external time through current levels of excitation and preparedness due to motivation,social and psychologically influenced behavioral perspectives.Consequently,neuronal conduction and processing occurs in three distinct orders of duration on the external-physical time continuum;but do not epistemologically hold the same status:(1) < 100 ms,is‘instantaneity’ and without ‘time’;(2) 100 ms-5 s,is the ‘present’;and (3) > 5 s,involves memory and duration estimation[19].Within each perceived category separate subgroups are identified.Within ‘instantaneity’,20 ms is the threshold for perceived succession or continuous presence,and approximately 40 ms is the minimum latency for reflex behaviors requiring only the spinal cord,e.g.,tendon-jerk responses.By contrast,learned motor ‘voluntary response’ with longer neural pathways are approximately 100-120 ms[67].Lastly,‘choice response’ behaviors involve additional cortical processing and slow to approximately 200-350 ms.
Consequently,simple reaction time is directly related to the delays in the single neurons or neural chains input-output actions,as variations depend on both the cell type and the modality of transmission-transduction;e.g.,sound-burst reaction-time is shorter than light-flash[65].For complex functional balance tasks like slacklining,concurrent brain tasks result in a distinction between task processing and achievement that occur concurrently but with different durations.The implications being that the brain cannot maintain the required global task of balance by means of ‘set and forget’,addressing joint stiffness by postural adjustment from visual inputs[28].This leads to an integrated global system where task success is determined by processing,accounting for time multiplicities,and adapting physiologically.This happens through concurrent neuroplastic change,down-regulation modification from hippocampal dampening,and spatial mapping within a learned and time-sensitive-adaptive experienced environment.To further complicate time’s multiplicity is normal and pathological human ageing on the brain[41].In early age we absorb,develop,and learn quickly,in later age the hippocampal-striatal circuitry for memory and spatial learning deteriorates[41].
Accordingly,the multiplicity of time is reflected in the learning and conducting of a complex balance task like slacklining by:the biological neuronal delay,the physical external time elapsed during the task,the perceived cortical time of the slackliner,and the process delays of choice action responses.Additional examples of time-multiplicity may also occur when temporal goals are set (e.g.,remain on the slackline for > 10 s);or when subjects receive instantaneous or delayed feedback during the elapsed-time standing on the slackline.The induced improvements in balance performance acquired during training are associated directly with increased striatal network efficiency[50].These can be demonstrated on MRI,where connectivity between the striatum and other brain areas is decreased at varying rates[47]to enable the dampening process through increased reaction speed and selectively reduced input from multiple brain functional performance contributors.
Immediate relevance of time’s multiplicity to slackline task performance
To remain stable and in balance,like slacklining,an individual either reverts to or progresses from a prior successfully learned strategy[6].They employ learned control techniques that have become achieved movement patterns[68]that occur on multiple body-response time-scales[1].However,on each new attempt to maintain an existing or progress to a higher level of competence,the integrated body-action occurs with the advantage of additional knowledge and experience[2,34],accompanied by accrued training[69],and the existing social structure determining why they perform this task[7].Further,deviation from the stable upright position requires input from the three sensory contributors,each with different conduction latent time delays:(1)Proprioceptionviathe joints;(2) Visionviathe eyes;and (3) Vestibularviathe labyrinthus[24].These facilitate self-balance against gravity’s inertial and ground-born vibration effects on head movements,particularly if vision is impeded.This provides at least six DoF:Three in the X,Y,and Z planes from the head’s linear acceleration and static displacement giving translational motion sensed by the ‘otolith organs’;and three from body rotation related to the X,Y,Z axes giving roll,pitch,and yaw as rotational motion sensed by the ‘semicircular canals’.These inputs occur within the subsequent physical time delays present in the human sensory[39]and motoric[27]neural pathways.The delays limit the achievement of stabilization[51]but are minimized by having input from three separate systems ‘packaged’[24]which enables responses to be assessed and adjusted based on how these inputs contribute to the ‘total balance system’[28].The subsequent physical time delay is differentially present at the levels of neural conduction[40],central processing[1],and motor response[27].This causes a difference between what is experienced and what was intended[65,66].
Changes in motor activity or responsive movement patterns occur after CNS processing,by which time the reactionary response needed will be different to that produced post-processing[12],and that which is experienced[66].A further confounding contributor of ‘packaged’ information is task complexity.This encroaches on time’s multiplicity as actions in the sensory systems support each other through a feedback loop that provides’ the signaling for the control task/s’[6].As tasks become more complicated[8],e.g.,slacklining compared to quiet standing[13],delay increases within the system leading to greater disparity between the reactionary time measure and the time experience.This disparity is amplified by the increasing differences that task complexity causes between the intention (future),the actualized (current experienced),and the reflective (past) responses the individual attempts to assimilate and integrate[4].Consequently,the brain continuously receives functional input that instigates change[44],constantly adapts,and provides new and modified paths[45].
These pathways will influence the multiplicity of measured time.The adopted strategy selected for HFM as an intended strategy will not be replicated exactly.This means that slacklining as a learned activity will be:maintained by a minimum level of practice,progresses only with further appropriate practice,and regresses with none[69].Hence,as the individual seeks to repeat a positive or successful ‘time-experience’,they employ a retrospective time point intended to be imposed on a future time point,that will then become the current measurable time point from the physical perspective[16]and the experience[65].This leads to the new adopted strategy and will in-turn become a new time point from which they will progress,or attempt to prevent further regression,to regain and progress their previous successful time-experience strategy.However,as each time point is reached,it is no longer simply a current-measurable physical property,but one that is transformed to an ‘experience’.
This ‘integrated experience’ then fluctuates at the CNS and physical 3D level between:Transitionary perspectives of anticipatory and preparatory actions;reflection on both positive and negative effective intentions;and the existing current moment of experience[9].During this ‘current moment’ it is recognized that time,as a context,is different and that this ‘current moment’ is perceived to change[17].Time is reflected as a physical measure[16]to that which the individual has achieved as the experienced entity,and which is and always was intended to be replicated,regressed or progressed[19].
When the BPS health model was introduced[14]it highlighted time’s importance within multiple perspectives,e.g.,“at all ‘times’ in history”.As such,“time is not discovered,it is constructed”[16],as the brain,being the focal source of the human entity,“does not process information,but creates it”[70].The brain constantly learns by enquiry and examination of the consequences and outcomes of action-based interactions,to test the hypotheses within its environment.This is achieved through control of the body as it explores and seeks,rather than simply acting as a coding device for information-absorption[70].Over time,the brain can foretell the likely consequences of its actions through cognition,as experience ensures our systems are calibrated,which enables past actions to acquire meaning.Information and experience is assimilated to become the present,and construct the future,through the ability to‘disengage from … sensors and actuators’[70].This cognitive loop replicates and parallels the precise physiological,neural,and mechanical-versus-control feedback loops which are influenced by our age-time physical and mental state.These existing models,described by infinite-dimensional mathematical differential-equations whose analysis ensures balance and stability,are governed by the essential limitations of sensory-motoric reflex delays[8].The consideration of the multiplicity of time provides an overlaid encompassing dimension,and an enhanced paradigm within which any model of movement must be considered.This is particularly so for complex functional actions like slacklining,and by consequence,several time parameters may intervene in the equations.
CONSEQUENCES OF THE POINT OF VIEW PRESENTED
Slacklining facilitates a maintenance or improvement in balance-control that is explained by existing mathematical manifold models[1,4,6].These models describe an expanding manifold,where a higher available range of motion is present before the manifold edges are reached[4],and balance is lost.With repeated training,individual learning facilitates an expansion of these manifold edges[1];though to a finite limit which appears to be in the order of 10 cm laterally from the foot/feet for beginner and intermediate slackliners[3],but may be greater for expert level slackliners[4].Consequently,balance stability is specifically discussed within existing models as a functional relation to the slackliner’s contact point with the line;which enables the existing models manifold to be expanded in the future.
As control improves,the reactionary forces of the slackline[4]represents a unique dimensional contributor that pushes back against the weight and force of the slackliner[6].This reaction force will reciprocate and remain incompatible with the slackline until a point of stabilisation is again reached.Further,this must also coincide with the individual’s cortical and cerebral inputs,including those from the hippocampus[46,48],as well as the motivational and emotional centers[15].These neurological aspects represent further dimensional contributors that have both preparatory and responsive actions that will assist closure of the manifold to a stable model,once all dimensional factors are equal and in harmony.This will represent a point of complete stability that is likely to last only briefly,till the imbalance of forces reoccurs and a state of entropy ensues.This is initiated by the combination of the individual’s internal reactionary forces and the external forces of the environment that include the slacklines stored kinetic energy.However,the expert slackliner can prolong this period of equilibrium and exhibit a greater capacity to achieve and maintain stability and HFM.
To fully comprehend this proposed MDM,BPS health is considered along with each dimensional contributor.Within the three planes of movement,simple physics is accounted for within a physical,topographical,ordinary equivalent space.From the dimensional perspectives of forces and action-reaction resulting from the individual’s physical interactions with the slackline and the environment,these are explained by classical mechanics.However,indirectly these recognized contributing forces are constrained by components of the BPS health model,and concurrently subjected to the multiplicity of time.Each force action is generated by the individual through the process of voluntary and involuntary muscular activity.It is a consequence of a balance reaction that is controlled from the three CNS levels,peripheral,spinal,and central.The central contributor includes cortical and cerebral inputs at the conscious and subconscious level[43],and the concurrent variations in motor cortex neural recruitment and neuroplastic changes[52].
The balance overlay affecting the dimensional input within the BPS health model entails that the biological,psychological,and social experiences of life perspectives are integral to HFM.The necessity of the given situation at hand,namely ‘not falling over’,is in itself a primordial imperative postural behavior[25]determined by postural orientation and postural equilibrium[71].These inputs directly affect the dimensional forces generated and reciprocated to ensure that slacklining is achieved,and overlies the physical aspects of motion,function,and action or action-inhibition[25].The sensory information is packaged and integrated[28],with or without a finite neural delay from time available processing[27]following input from the somatosensory,vestibular,and visual systems[24].This in-turn determines the physical load perspectives and a muscular action at all levels of the body,employing muscle synergies as required to simplify motor-control[29],and achieve the necessary forces to retain balance and achieve HFM[50].
However,these loads are themselves determined by the goals of the movement task at hand and the context of the environment it is in[71],the fight-flight-freeze response[25],amusement[5]or physical endeavour[61];and the skill and age of the individual[72].These perspectives of the individual’s goals and expectations are also affected by their prior life experience.This in-turn leads to both physical as well as emotional and psychological determined experience[20].They are also affected by the multi-dimensional aspects of time in relation to space[16],perceived position[24],the stage of learning[4],and the individuals’ position related to the anticipatory neurological reaction.These anticipatory postural adjustments maintain postural stability by compensating for destabilizing forces associated with moving a limb[69].When the anticipatory movements align with the physical movement requirement and the psychological anticipatory experience related requirements,then the point of stability is facilitated.Consequently,the retention of balance on the webbing band to achieve slacklining is an integrated response of multi-dimensional inputs that is determined from:The amount of cognitive processing necessary for postural control,as established by the complexity of the task at hand,and the capability of the individual to provide the control (Table 1).
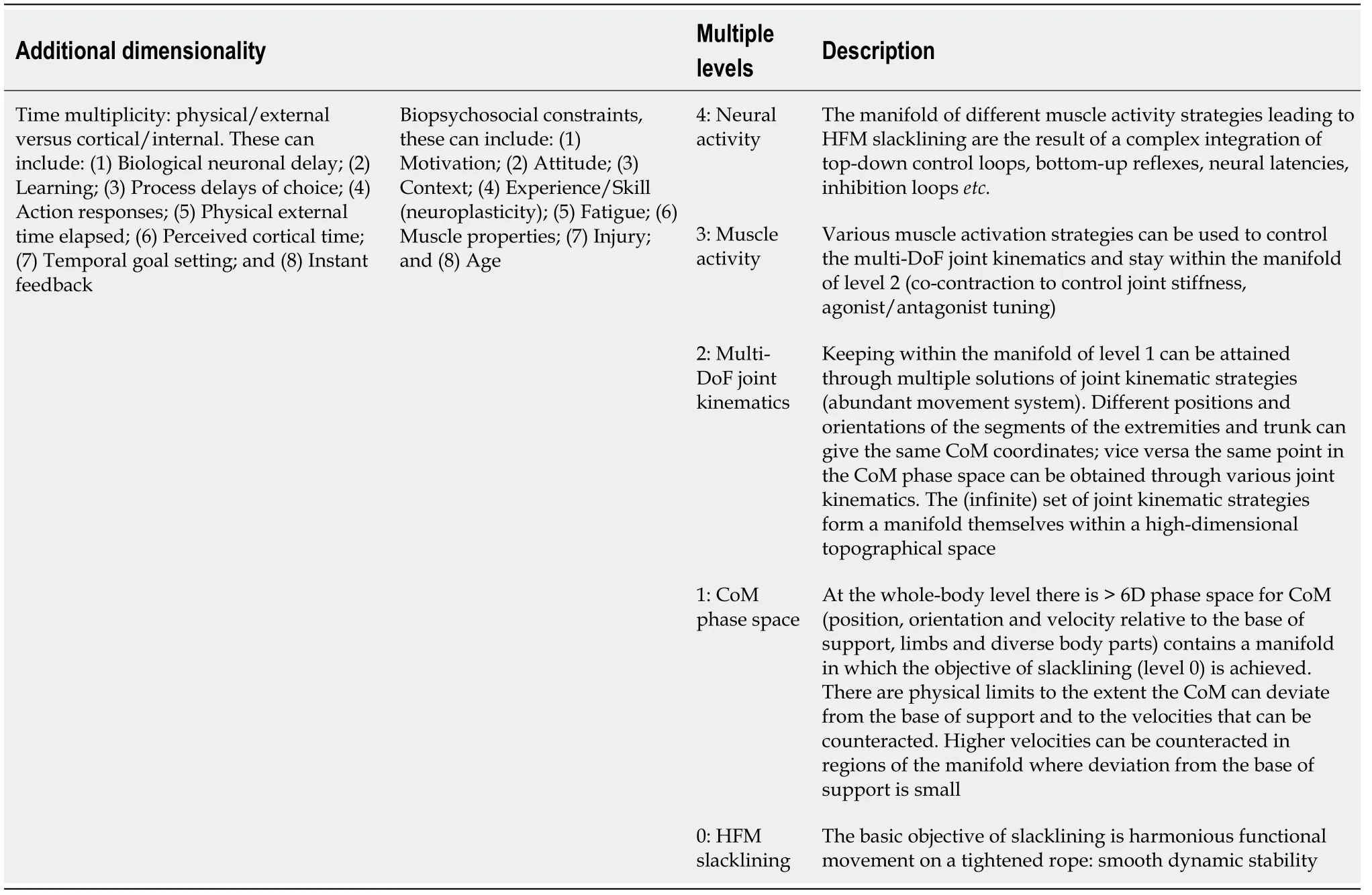
Table 1 Summary table of the proposed concept-model
FURTHER RESEARCH DIRECTIONS
Future research should investigate this slacklining MDM as a high-dimension mathematical manifold that details and discusses the multiple proposed contributing dimensions/constructs.There should include specific model applications that enable an improved understanding of HFM,stability,and balance-control.This may provide new/evolved evidence based recreational,performance,and rehabilitation slacklining applications and techniques as well as general stability-balance models.The MDM role in areas requiring development and utilization of stability,such as applications for machine learning for identifying pattern recognition of movement phenotypes.These applications may also extend to prostheses,mechanized automation,altered gravitational environments,robotics,mechatronics,and AI driven locomotion.
CONCLUSION
The successful strategy an individual employs to achieve slacklining is optimally explained by a hypothesized MDM.The strategy encompasses self-learned movement patterns that involve active and reactive generated forces that are integrated with gravity and the slackline’s elastic reactive properties,governed by classical mechanics,occurring within a 3D defined space.These actions are subject to the BPS health model that integrates biological criteria,under psychologically experienced and motivated influences,affected by socially determined inputs.Concurrently,the multiplicity of time pervades and integrates all contributors as a measurable unit and integrated spatial and cortical experience.Dynamic stability is transitory and momentary,and acquired through the integration of all dimensions.It is higher in those with greater skill,but always returns towards entropy with movement away from,back to,and only momentarily crossing the point of fully integrated stability,a duration that lasts longer as skill increases.This multi-tiered context facilitates multiple slacklining applications in movement,balance and stability.Further research is required to investigate this proposed model and potentially enable an improved understanding of HFM and its application in other diverse constructed and mechanical applications,varied environments and automation,robotic,mechatronics and AI factors.
ACKNOWLEDGEMENTS
The author group acknowledges and specifically thanks Dr.Ben Serrien for his invaluable input in the areas of physics,classical and quantum mechanics,the formation of Table 1 and assistance in manuscript editing.Without his input this article would not have been completed.
杂志排行

World Journal of Orthopedics的其它文章
- Bibliometric analysis of research on the effects of human immunodeficiency virus in orthopaedic and trauma surgery
- Pain and function deteriorate in patients awaiting total joint arthroplasty that has been postponed due to the COVID-19 pandemic
- Proximal tibial osteotomy for genu varum:Radiological evaluation of deformity correction with a plate vs external fixator
- Advantages of preoperative planning using computed tomography scan for treatment of malleolar ankle fractures
- Dual antibiotic loaded bone cement in patients at high infection risks in arthroplasty:Rationale of use for prophylaxis and scientific evidence
- COVID-19 and its effects upon orthopaedic surgery:The Trinidad and Tobago experience