传统汽车应用域控制器与主干网技术路线探讨
2021-03-31吴成东
吴成东
(安徽江淮汽车集团股份有限公司技术中心, 安徽 合肥 230601)
1 当前E/E架构与整车厂的应用现状概述
汽车电子电气架构的发展趋势是从分布式到集成式,再到域控制和车载电脑。当前分布式架构的优点是可裁剪、可扩展适应高低配的需求;按照功能分配控制单元,适应于整车开发组织架构;控制单元功能单一,供应商开发后可以应用不同OEM;零部件独立开发,平台化效率高,软硬件开发均可依托供应商;整车采用基于网关和CAN通信成本低。但随着汽车产品消费升级,配置下沉,控制器与线束的成本均较高;控制器之间的通信需求不断增长,传统CAN总线负载率提高,虽然通过网关划分了网段,但有大量交互还是得通过网关的报文路由和信号路由。大量控制器软件分布在供应商手中独立开发,增加了整车集成和测试的难度,导致整车软件开发效率较低,无法实现整车级的OTA。
但在此过程中,OEM掌握了部分软件逻辑简单、对功能安全要求不高的控制器的开发,例如车身控制器BCM、门模块、空调控制等。逐步搭建的研发团队、知识结构、技术积淀和供应链体系,无法彻底抛弃和另起炉灶。而造车新势力则没有这方面顾虑,可以完全从零开始。逐步过渡、迭代开发有利于传统OEM充分利用现有资源,降低开发成本。
2 汽车各控制领域的发展方向和需求
传统车动力系统ECU+TCU的形式已经固化,新能源车的动力系统PCU+VCU+BMS+OBC的模式正在往集成化方向发展。底盘控制领域已经足够成熟,高端车采用电控悬架提高舒适性,采用可变转向比提高操控性。随着混合动力开发,P4电机逐渐取代了传统的分动器+传动轴+驱动桥的四驱系统。在被动安全领域,独立的安全气囊控制器被几个核心供应商所掌控。
汽车“新四化”影响较大的是自动驾驶领域、车身控制领域和智能座舱领域,是行业主要的发展方向。自动驾驶起步晚,但技术起点较高且在快速升级应用各种新技术,大量的摄像头、雷达、地图对通信系统要求较高,研究引进以太网。而EPS、ESC、EMS、TCU传统动力底盘系统仅做软件开发以适应自动驾驶对转向、制动、加速、停车的要求。
车身控制领域和智能座舱领域是客户价值体现最多的领域,功能越来越复杂,所用的新技术大部分来自于消费电子,如车联网、语音控制、AI等,由于更新升级较快,迭代周期更接近于手机,需要OEM自主开发实现快速应用和迭代,要求OEM必须具备在控制器软硬件方面的开发能力。
3 向域控制与主干网方向迭代的技术路线
域控制器是对领域内算力的整合,按照功能域或区域整合,对软硬件开发能力要求更高,将相关或不相关的功能整合在一起,域控制器具备主干网的接口。主干网采用高速通信,目前主流仍然是CAN,动力底盘部分有采用Flexray,成本高[1]。高端OEM在研究以太网作为主干网,但国内传统主机厂难以承受研发投入和零部件成本,且整车层面没有必然的功能需求,目前仅在自动驾驶领域和OBD诊断方面采用。各主机厂基础技术架构不同,研发组织架构不同,无法全盘推倒,所以根据自身的实际情况去迭代开发才是最符合自身需求、降低开发成本和控制开发周期的路线。下文以传统分布式电子电气架构为例,研究往域控制与主干网方向演进的技术路线。
3.1 第一阶段:形成2个域控制器
动力底盘单元不变。在车身领域以BCM车身控制为中心整合出车身域控制器,带大量的子CAN和LIN等子网,短期内不能整合的则作为子节点。随着开发能力的提高,域控制器逐渐集成控制类的子节点,最终只保留了带总线的开关、传感器和执行器以及对造型和安装结构有特殊要求的部件,其内部软件完全通用化[2]。同样在智能座舱领域,以HMI主机中心仪表、HMI屏、HUD等座舱域控制器下属的显示屏,通过内部CAN传输控制信号,LVDS、CAN、以太网等传输视屏和音频等信号,通过LIN传输传感器、开关和部分执行器的信号。域控制器逐步对领域内子节点大规模集成,是领域内功能算法的中心,车身域控制器和智能座舱域控制器软件将是整车软件开发和产品升级的核心。
形成以动力底盘+车身域+座舱域的主干网架构,独立网关或将不存在,网关的功能将分布到各域控制器中,如图1所示。对主干网节点进行整合裁剪,动力底盘节点集成的难度大,但是可以通过带子CAN和私有CAN来减少主干网的节点,从而控制主干网的负载率。子网不但用在域控制器与子节点之间,同时可以用在主干节点之间辅助主干网的通信。
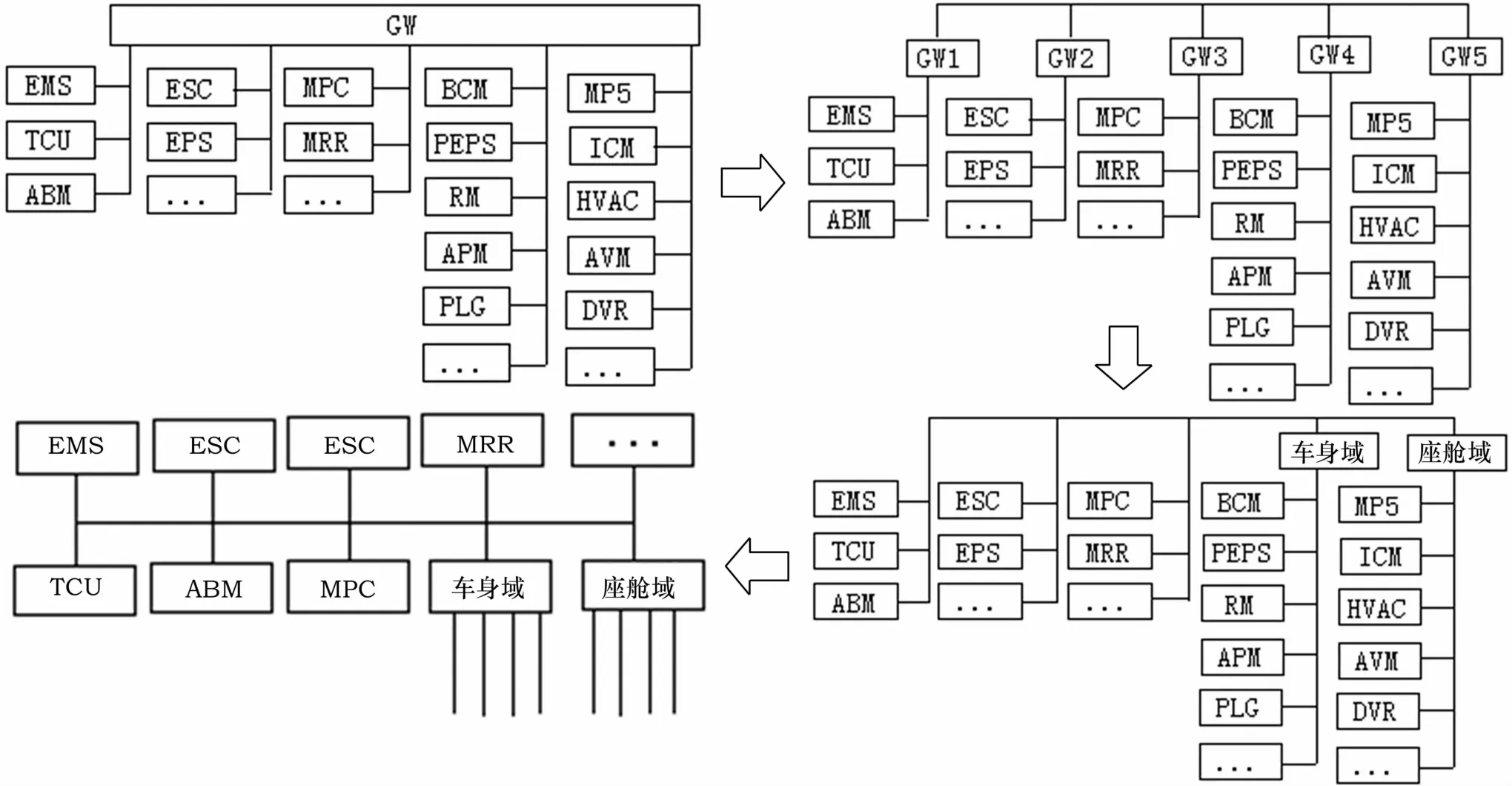
图1 动力底盘+车身域+座舱域+主干CAN
主干网考虑逐步升级,初期沿用CAN对传统动力底盘节点的通信接口没有变动,充分发挥CAN低成本的优势,充分考虑控制主干网的负载率。
3.2 第二阶段:升级主干网
随着功能增加和主干网负载率的提高,升级主干网,如使用CAN-FD,也能够使动力底盘大部分节点兼容,能够对现有架构进行延续、拓展和兼容,用CAN-FD报文代替CAN报文,减少报文数量,降低主干网的负载率;视动力底盘一级供应商的零部件升级情况,是否会全部升级到采用Flexray、以太网或者新的更高速的总线作为其主通信方式[3-4]。当然也可以在原主干网基础上,根据功能需求局部采用Flexray或者以太网进行过渡,如图2所示。这种架构适合大部分传统汽车OEM,采用分阶段、迭代方式的开发,有利于技术能力的逐步提升,提高产业化落地的效率,降低开发风险,同时符合整车产品迭代的规律,保证了零部件供应链的延续性。

图2 升级主干网
3.3 第三阶段:其他领域的整合
对于纯电动和PHEV,VCU将集成PCU、BMS、OBC等模块形成新能源的动力域控制器,接入主干网。对于燃油车新增一个动力域控制器如果仅仅起到动力域网关的功能而没有集成算力,则意义不大可直接跳过这一阶段。L2+及以上级自动驾驶将形成一到两个自动驾驶的信息融合层与决策层核心控制器,接入大量的摄像头、毫米波雷达、超声波雷达等,并集成以太网交换机获取差分定位与高精度地图信息,可以扩展成自动驾驶域控制器[5]。自动驾驶域控制器接在主干网上与EMS、TCU直接交互。如此一来则形成了动力底盘域、自动驾驶域、车身域、座舱域,如图3所示。在自动驾驶域、智能座舱域内部,根据通信需求可以内部采用以太网,连接摄像头、高精度地图、T-BOX等。
最终,随着OEM对各个域控制器软硬件开发能力掌握,以及自动驾驶成为标配或者法规项,是否会进一步整合,动力底盘域与自动驾驶域整合成行驶域,车身域与智能座舱域整合成驾驶辅助域,最终二者是否会再集成形成车载计算机还需要分析。目前来说,虽然控制器集成了,但传感器、执行器由于安装位置的要求无法集成,普通经济型车也有多达200个传感器和执行器,都接入车载计算机线束将会比较复杂。因此需要在分布式和集中式控制之间寻求系统成本、装配维修和可靠性的平衡。

图3 四域控制器+主干网
4 总结
传统OEM考虑自身的特点无法“一刀切”来切换自己的E/E架构,但技术发展趋势又无法阻挡,所以利用现有资源分阶段逐步提升研发能力,逐步过渡才是最有效的演进路线。传统整车厂进入域控制器软硬件开发阶段,研发组织架构尤为重要,组织架构决定了出产效率、产品成本和开发成本。由机械转型为软件为主的IT、出行科技公司,必须进行有效的组织架构转型。
