园林移动施药实时监测系统设计与试验*
2021-03-30汪东茹煜刘洋洋刘彬
汪东,茹煜,刘洋洋,刘彬
(1. 南京森林警察学院,南京市,210023; 2. 南京林业大学机械电子工程学院,南京市,210037)
0 引言
随着我国城市化脚步的加快,园林发展也越来越受到重视。病虫害是影响城市园林质量最为主要的因素之一,园林病虫害种类高达600余种[1]。园林植物病虫害防治技术与设备还不够完善,其中主要表现在病虫害防治过程中不科学地使用农药。目前园林、果园的植保方式主要是人工喷洒农药和小型车载式施药,但该方式喷幅较窄、喷洒距离有限,导致施药效率低[2]。而中国的种植地的地形多种多样,机械化施药技术对农药的利用率只有30%,严重制约了病虫害防治效果[3-4]。由于施药机械的机身自重和噪音较大以及机身温度较高,人工背负施药机械作业的方式,作业的劳动强度大,危险性高,容易出现施药人员中毒现象。园林作业劳动强度大,但是适用园林的机械设备少,并且作业效率低,严重制约园林产业发展[5-6]。人工施药的施药量不均匀,容易出现施药过量或施药不足等现象,对农药的利用率较低,不能满足现代园林植保的要求。移动植保技术是园林生产中的重要组成部分,采用移动喷雾防治园林病虫害,能够快速高效地完成病虫草害的防治,有效减少喷雾作业劳动强度,提升喷雾作业的工作效率[7]。赵林亭等[8]研发的果园自走式电动底盘控制系统可以满足园林植保作业载重等性能要求,但无法实现施药情况的实时监测,而在实际作业的过程中,精准监测施药情况尤为重要。
精准施药是园林植保未来的发展方向之一,精准监测技术是实现精准施药的前提[9]。为此国内学者展开了监测施药流量的研究。陆章涛[10]设计的基于单片机的施药监测系统,通过速度、流量、压力传感器获得施药监控点的信息,实现对施药信息的准确采集。翟长远等[11]设计的施药监测系统,以单片机为基础,将药液喷洒流量、药箱内部压力等其他变量作为施药参量,并通过单片机技术实现各施药参量显示。孙琦设计的基于单片机的施药监测系统,通过利用串行接口通信、数据库编辑处理等技术,实现简单近距离传输数据。陆永超等[12]研发了果园药液喷洒监测系统,将多元传感器整合在单片机之上,实现喷雾压力、流量、速度和药液余量的监测。以上研究都可以同时监测施药速度,施药压力和流量,但没有轨迹监测功能,而要实现精准施药,对轨迹监测尤为重要。为实现施药全过程的监测,本文研发出的移动喷雾作业实时监测系统。该系统针对园林病虫害防治作业,能对移动施药进行实时监测,具有显示施药车的轨迹、车速、施药流量和药箱药液余量等信息的功能。
1 远程施药监测系统设计
本文设计的园林施药监测系统由施药作业系统和作业监测系统组成。
1.1 施药作业系统
施药作业系统可分为车体、药箱两大部件,如图1所示[13]。
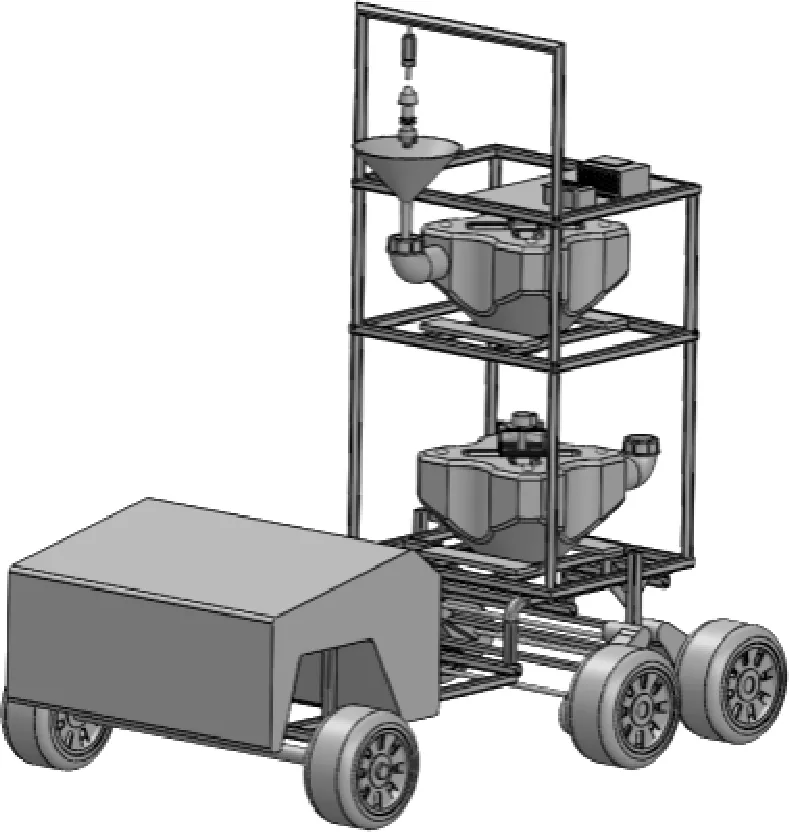
图1 移动喷雾施药监测系统总装图Fig. 1 General layout of mobile spray monitoring system
车体的作用是承载药箱移动施药,车体设计主要包括底盘和动力系统,如图2所示。本设计采用6个全地形防爆车胎,以保证施药在草地、碎石路、泥土路以及水泥路上安全行驶。其中两个前轮主要是负责转向与承载车头重量,4个后轮前后间距较小的设计可以增加施药车的载重量,又可以减小了因道路不平整造成的药箱中药液的晃动。底盘架(长130 cm、宽80 cm)采用4060型号的铝型材做成,可以满足施药车的车体的强度要求,可载重150 kg以上。

图2 移动小车实物图Fig. 2 Physical picture of moving car
动力系统采用4个蓄电池,形成输出为24 V10 A的电瓶组。电机采用5个24 V直流电机,其中4个为驱动电机,安装在后轮上,通过正反转实现施药车的前进与后退;1个为转向电机安装在车头上,通过正反转调整施药车行驶方向。
药箱为双层药箱可装入两种不同的农药,每层药箱的容积为10 L,实现对多种病虫害分别进行精准施药作业,避免无差别施药的目的,如图3所示。水泵采用的直流增压泵隔膜泵,分别安装在两个箱体的底部,与药箱的出口连接,为施药提供水压。药箱支架选型采用202不锈钢焊接。

图3 药箱结构Fig. 3 Platform support
1.2 作业监测系统
1.2.1 硬件设计
硬件部分是实现监测功能的底层结构,通过硬件设计保证系统的稳定性与可靠性。硬件部分包括信号采集模块、信号处理模块、信号传输显示模块和数据存储模块。信号采集模块由GPS定位系统、液位传感器、流量传感器和人机交互接口组成;信号处理模块为单片机系统;信号传输显示模块包括GSM无线通信元件和显示屏等,如图4所示[14]。信号采集模块通过多元传感器实时采集施药行驶轨迹、行驶速度、施药流量和药液余量等信号[15]。

图4 系统框架图Fig. 4 System frame diagram
其中本文GPS导航模块实时采集地面施药机械的行驶轨迹。采用霍尔轮速传感器,设置地面施药机械的车轮上,用于实时采集地面施药机械的行驶速度。为了重复、精确的进行监测,采用涡轮流量传感器实时监测药液流速,采用电容式液位传感器采集药箱液面高度。计算施药情况时,采用STM32F103VCT6单片机作为微控制器,对多元信号进行融合、分析和处理。信息的传输与显示采用TFT彩屏和设备云APP,能以数值和图表结合的图文并茂的形式,快速的把施药情况直观的传递给使用者。
信息处理与传输部件电路原理图如图5所示。GPS和传感器通过串口通信方式与单片机进行数据交互,GSM通信模块通过异步串行通信口的TX和RX与单片机相连。为了确保单片机的稳定性和鲁棒性,把复位电路、晶振电路与单片机内部的电路相结合,从而实现监控系统的平稳运行。


(a) 单片机电路(b) 通讯模块电路
1.2.2 软件设计
园林病虫害防治时间紧迫、条件复杂,因此对施药监控系统提出了精度高、稳定性强、数据实时性传输以及维护保养简便等要求[16-17]。为实现园林植保作业实时监测的需求,软件设计需要满足对数据的处理、传输、存储与显示等功能。本设计采用C语言通过Keil编译器编写软件程序,系统软件设计流程如图6所示。在系统启动时,初始化程序后,调用执行GPS子程序实现施药车位置的定位,随后调用施药速度计算子程序、液位监测子程序、流量监测子程序和流量控制算法。
GPS导航设备统一采用美国国家海洋电子协会制定的NMEA 0183标准格式,NMEA-0183协议采用ASCII码来传递GPS定位信息,因此在GPS监测应用中,根据NMEA-0183协议的标准规范,通常采用队列的方式来接收数据,将位置、速度等信息通过串口存入列队中,在循环程序中对数据进行解析,确定施药车坐标信息,通过连接各时间点的坐标可得出施药车运行的轨迹。然后调用施药速度算法,即可计算单位时间内的坐标点变化,从而确定车速。车速传感器安装在驱动轮上,通过霍尔原理计算车速。
车轮每转一圈行驶的距离为1 m,因此可通过式(1) 计算车速大小。
(1)
式中:v——车速,m/s;
t——车轮每转一周的时间,s。
本文通过液位传感器采集液面高度,采用A/D转换器将液位传感器得到的液面高度模拟量信息进行转换,得到的数字量信息与药箱横截面数据结合,从而确定药液量。通过流量传感器监测所喷出的药液,由于流量传感器输出的模拟信号是脉冲信号,其按一定电压幅度,一定时间间隔连续发出,无法直接得到具体的流量数值。所以需要先把脉冲信号转换为数字信号,得到脉冲的数字频率。再调用流量计算函数得出施药流量实际值,函数如式(2)所示。
(2)
式中:Q——施药流量,mL/s;
f——脉冲频率,Hz;
K——每转输出的脉冲次数;
V——每转一周流过的药液体积,mL。

图6 系统软件设计流程图Fig. 6 System software design flow chart
微控制器每100 ms读取一次传感器信息,通过算法计算后存储到数据存储器,并刷新TFT彩屏显示信息。与此同时也把数据打包发送到OneNET物联网平台,OneNet平台可以同时关联多个移动智能设备,通过与平台网络联接的终端设备,都可以实现远程实时监控[18]。在数据传输上传的过程中,本设计采用TCP通讯协议,设备通过TCP连接接入OneNET进行数据交互,通过上传的自定义脚本来实现设备与云端的数据传输。
2 材料与方法
施药车的车速、流量、药液余量和轨迹都是判断施药质量的重要因素。为了检验自主研发的监控系统对施药轨迹、车速、流量和药液余量检测的精确性,本文进行的试验包括施药轨迹监测、施药速度监测、施药流量监测和液位监测试验。
2.1 试验材料
试验在校园操场进行(经度118.82°,纬度32.08°),试验时间为2020年6月19日,气温为21 ℃~29 ℃,风速为一级风。液泵选用山东某公司生产的雨露型号的无人机液泵。扇形喷头因结构简单、雾滴产生方式较为经典等优势,在地面和航空施药作业中均广泛使用[19],因此本文选用了ST110-02型扇形喷头。
2.2 试验设计
施药轨迹监测试验方案:操控施药车在按照操场跑道行驶,记录轨迹与实际跑道比较。以跑道为基准线,通过式(3)计算偏离跑道的轨迹于占总长度的比值判断,监测的准确性。
(3)
式中:σ——轨迹监测误差,%;
l——偏离跑道轨迹的长度,m;
L——跑道周长,m。
车速监测试验方案:将轮速传感器安装在施药车驱动轮上,试验时分别操作施药以高中低三个车速在100直线跑道上匀速运动,记录每次跑完时间,每个车速试验三次,取平均值视为有效值。通过式(4)计算车速监测误差。
(4)
式中:ζ——车速监测误差,%;
t′——车速监测时间,s;
v′——监测的车速,m/s。
施药流量监测试验方案:试验为2组三水平试验,即分别对两个药箱的施药流量进行三水平试验,取平均值视为实际值。试验前先在药箱中装入5 L水,用秒表记录5 L水完全流出的时间。流量实际值为5 L水与流量监测时间的比值。通过式(5)对比流量监测值与流量实际值,计算出流量监测误差。
(5)
式中:Q″——监测施药流量,mL/s;
η——施药流量误差,%;
t″——流量监测时间,s。
液位监测试验方案:提前将药箱内注入一定量的药液,并采用电子游标卡尺测量液面高度,记录该值作为实际值。将液位传感器安装在药箱低部监测液面高度。试验为10组三水平试验,每组试验重复3次,取监测值的平均值为有效值。通过式(6)对比监测值与实际值,计算液位监测误差。
(6)
式中:φ——液位监测误差;
h′——液位监测值,mm;
h0——液位实际值,mm。
3 结果与分析
3.1 施药轨迹监测试验
施药轨迹记录如图7所示,图7(a)为监测系统显示屏监测施药轨迹,图7(b)是施药轨迹于实际跑道对比图。

(a) 监测的轨迹

(b) 轨迹对比
通过小车轨迹监测的试验所得到的图像与真实跑道较为接近。由于人为操控施药车而导致施药车无法完全的按照跑到进行,使得轨迹发生偏离。从整体来看,施药车能真实地反映了操场地跑道的轮廓。通过式(3)计算可得误差为4.75%,误差较小,说明系统对施药轨迹监测的能力满足施药需求。
3.2 施药速度监测试验
施药速度监测试验误差结果分析如图8所示。

图8 施药速度监测试验结果Fig. 8 Test results of spray speed monitoring
从图8可看出在每组试验中,无论是监测速度都高于实际速度,并且误差均呈下降趋势。主要因为试验时无法操作施药车直线运动,导致实际行驶距离大于100 m,由此造成实际速度较小。施药速度监测试验数据误差分别为2.67%、1.90%和1.95%,施药速度监测平均误差为2.17%。误差较小,说明系统对施药速度的监测满足园林施药监测的需求。
3.3 施药流速监测试验
施药流量监测试验误差结果分析如图9所示。
从图9中可发现,上层药箱施药流量的监测误差在1.25%~2.5%之间,下层药箱施药流量的监测误差在0.59%~1.88%之间。由于传感器存在精度问题,因此误差无法避免,流量监测最大误差为2.5%,平均误差为1.54%,误差较小可以满足园林施药对流量监测的需求。

图9 施药流量监测试验结果Fig. 9 Test results of spray flow monitoring
3.4 液位监测试验
液位监测试验结果分析如图10所示。

图10 药箱液位监测试验结果Fig. 10 Test results of liquid level monitoring
图10可见,系统液位监测和实际液位测量误差在0.2%~0.76%之间,平均误差为0.44%。
由于施药车在行进过程中,药箱中的药液的不停晃动,增加液位监测的困难程度。尽管液位监测增加了防抖程序,但是自身精度问题有限,误差不可避免。其次,药箱薄壁上残留的药液也会使显示的液位值低于真实的液位值。药箱中残留的杂质,致使压力变送器的端口堵住,从而使得传感器所获得的压力迅速提升,导致转换后的电容信号增加,使得显示液位大大增加。在液泵从药箱底部抽出药液,经软管输送至药液喷头期间,仍有少量药液残留在软管之中造成误差。但是总体上误差较小,可以满足园林施药对液位监测的需求。
4 结论
1) 对移动喷雾系统中各个传感器的性能进行了测试与分析,可以发现选用的GPS、轮速传感器、流量流速传感器以及压力变送器均满足设计的总体需求。各个传感器监测能力均达到90%以上。
2) 设计了一种园林移动施药实时监测系统,通过所对系统软硬件的设计,实现施药速度、施药轨迹、施药流量和液位的实时监测。通过监测试验验证了该系统对施药参数的监测性能较强,满足园林施药的监测需求。监测试验结果表明,该系统对轨迹监测的误差为4.75%,施药速度监测的误差在1.9%~2.67%之间,施药流量监测的误差在0.59%~2.5%之间,液位监测的误差在0.2%~0.76%之间,误差可以接受,均属于合理范围,说明系统可以实时准确地监测施药作业参数。