基于分布式光纤传感系统的车辆轨迹提取方法
2021-03-29王茂宁李钟麒张建伟钟羽中
王茂宁,李钟麒,张建伟,钟羽中
(1.四川大学 计算机学院,四川成都610065;2.四川大学电气工程学院,四川 成都610065)
近年来,随着传感、通信和信息技术的发展,各国纷纷提出了第五代道路、合作式智能交通、互联车辆以及智慧公路等面向高速公路智能化的发展战略,并开展了大量的技术研发和示范推广工作[1]。智慧公路是由人、车、路和环境协同构成的动态系统,从底向上由信息感知、特征检测、模式识别、智能服务等几个层次组成。其中,车辆的特征检测和轨迹提取具有重要的意义:一方面,可以支持宏观的高速公路交通监管和道路规划功能,包括交通流量监测、交通态势预估、交通事件分析、运输规划与道路构建等;另一方面,可以提供微观的高速公路智能化服务,包括专用车辆跟踪、车辆行为理解,以及在新一代车路协同式智能驾驶系统中的复杂环境分析、车辆轨迹预测等需求。
传统的车辆检测方法包括环形线圈、红外线传感器、地磁感应器等,但这些检测方式是在交通断面上离散地采集交通参数,如果要获取车辆的全时空轨迹,需要较密集的安装方式和较高的成本。视频检测技术也被广泛用于车辆特征检测和轨迹跟踪,除了利用在公路断面上所安装的摄像头以外,也有学者研究利用无人机航拍图像提取道路上的车辆轨迹。随着智能汽车和车联网技术的发展,车载GPS、蓝牙、Zigbee等定位和通信模块可以把车辆的动态位置信息实时传输到监控中心,以此提取车辆轨迹。这些检测方式感知的原理不同、采集的信号各异,因此其信号处理、特征检测、轨迹提取的技术手段也大相径庭。卢胜男[2]提出了一种融合特征匹配和光流法的车辆目标跟踪方法,实现在道路监控视频中车辆的动态稳定跟踪,并利用基于增量式DPMM的贝叶斯最大后验概率估计方法对车辆轨迹作聚类分析,从而对车辆异常行为模式进行识别。Tang等[3]则研究了利用交叉摄像机对交通场景中车辆3维轨迹进行提取的方法,在摄像机标定的基础上生成具有空间信息的道路全景图像,利用几何约束建立车辆周围的3维边界盒,从而得到车辆的投影质心,并通过计算全景图像中投影质心的空间分布,提取车辆的3维运动轨迹。一些研究者们着眼于利用无人机视频来获取车辆轨迹。林伟东[4]针对无人机视频特性提出了自动化图像校正方法,并利用车辆轨迹参数使用双向LSTM模型对车辆轨迹特征序列进行建模学习,实现了对多种车辆行为的识别分类。李少博等[5]针对复杂交通环境下无人机视频中车辆目标跟踪易丢失的问题,提出了多尺度KCF(核相关滤波)优化算法,实验结果表明该算法跟踪效果在目标遮挡和存在阴影的情况下表现优异。乔少杰等[6]提出基于GeoHash的空间编码技术GeoHashTree对车辆的GPS信号时空点进行索引,提高邻域轨迹点查询效率;并将GeoHashTree应用于轨迹聚类,提出一种改进的基于密度的车辆轨迹聚类算法。实验结果表明:相比传统算法,该算法时间开销小,聚类结果的准确性高。潘苗苗等[7]提出了一种基于统计推断的车辆GNSS轨迹滤波方法,不依赖路网等辅助数据,在去除离群点的基础上识别出轨迹中的低质量线段。该方法通过实际出租车GNSS数据的验证测试,既识别了离群点导致的异常线段,也检测出了低采样率导致的异常线段。赵昌丽[8]利用GPS和北斗双模定位实现车辆轨迹的连续性跟踪,对GPS/BD双单点定位系统数据进行了信息融合,在两者定位给值偏差超出约定阈值的情况下,又以来源于惯性测量组件的数据进行推算估计予以校正,实验验证了该组合定位方法的有效性及环境适用性。张景楠等[9]则利用对车载蓝牙设备MAC地址的检测,设计了一种基于蓝牙技术的车辆轨迹追踪方法,并研发了相关蓝牙检测器设备。
在高速公路车辆检测和轨迹提取系统中,上述方法各有优势,也存在各自的问题。利用固定摄像头或无人机,基于机器视觉算法的视频图像检测方法识别率高,并可获取丰富的车辆微观信息,但其精度和准确性受天气、光照、环境的影响较大,而且是在局部的点、面、段上提取信息,无法做到全时空车辆轨迹的提取。而GPS、蓝牙等被动检测方式依赖于车载智能设备的普及和车-路通信(vehicle to road,V2R)网络的铺设,还不能成为目前高速公路车辆轨迹检测的主流手段。
由于声波和振动传感器具有无源性、相对长距离、低功耗、全天候等特点,基于声学和振动信号的车辆检测提供了一种便携式、易于实现和低成本的方案[10],在军事领域发挥了重要作用,同时在民用ITS领域得到应用。在美国军方Sense IT项目所研究的无人值守地面传感器(unattended ground sensor,UGS)系统中,利用声音传感器和振动传感器感应地面车辆的活动,并通过对采集信号的处理分析来确定车辆位置、类型和其他可用信息[11]。Barbagli等[12]提出了一种基于声音传感器的车辆检测系统,该检测方法利用经过车辆的声音会在轻微不同的时间到达部署在路边的一对麦克风,通过计算麦克风读数的互相关性计算时间差,互相关函数的峰值即对应于车辆的位置,能够确定所谓的声音地图,可表示车辆沿预定轨道的运动。根据行驶车辆多种噪声的出现和权重与道路交通密度的相关性,Tyagi等[13]提取了车辆累积声学信号的短期谱包络特征,由此建立了类条件概率分布模型,并应用贝叶斯分类器和SVM分类器进行道路交通密度分类(拥堵、中等流量、畅通)。George等[14]则提出了一种声音模式分类方法,该方法能够识别重型、中型和轻型车辆以及喇叭的声音。Na等[15]描述了一个用于道路交通监控声学系统的设计和实现,该系统使用37个麦克风组成的网格,可监测多条车道的交通参数,检测参数包括车辆计数和分类,以及估计平均车速和车道占用率。研究者们进一步提出,使用更复杂的分类器可以获得更好的结果。Stocker等[16]提出路面振动测量和有监督机器学习对车辆进行检测和分类的方法,并在实际道路上采集数据验证了方法的可行性。Jin等[17]利用对数尺度频率倒谱系数矩阵(LFCC)对车辆的地震波信号进行特征提取,并输入卷积神经网络实现车辆分类。
由于分布式光纤传感技术(distributed acoustic sensing,DAS)具有可获取连续分布信息、探测灵敏度高、抗电磁干扰能力强、成本低(可利用通信光纤)及隐蔽性强等优势,基于DAS的交通检测方法在近年受到了越来越多的关注,包括列车定位和速度估计[18]及公路车辆跟踪和交通检测。叶彬[19]对分布式光纤系统所采集的车辆振动信号在时域、频域和时频域进行分析和特征提取,并分别利用基于神经网络(neural network,NN)的识别算法和基于支持向量机(support vector machine,SVM)的识别算法实现车辆识别。何佳朋等[20]提出了一种基于Hough变换等图像处理技术的光纤时空传感信号的运动车辆轨迹提取方法,并根据轨迹参数分别计算车速、平均车头间距、车流量等交通参数。上述两项的研究结果都基于仿真环境和实验室环境,未在实际公路上进行样本数据采集。Liu等[21]利用DAS技术获取车辆行驶振动数据,采用改进的小波阈值算法和改进的双阈值算法检测交通流量,并通过在一个矿区的试验性研究证实了DAS的车辆检测能力和所提出算法的有效性。Liu等[22]应用改进的小波去噪算法和双阈值算法对车辆振动的DAS信号进行特征提取,得到车辆数量和速度,并且采用支持向量机分类器进行车型分类,在校园内交通环境所进行的实验表明,该算法对大中小型车辆的分类准确性大于70%。
车辆振动检测与识别的主要研究方法是在时域、频域上采用多种方式综合分析传感器所采集数据,并进行特征提取和模式识别。然而,现有方法存在两个局限性:一是,只对1维时间信号提取了特征,摒弃了空间关联性,从而无法长距离地监控目标行驶轨迹;二是,通过有监督的机器学习方法对信号进行分类或者识别,在实际高速公路场景下采集的信号非常复杂且不直观,即使花费大量人力资源,也难以找到依据对其进行准确的手工标记,在实验室环境采集的数据或者仿真产生的数据与真实场景采集的数据分布不一致,使用实验环境数据或仿真数据作为样本所训练的模型不能直接迁移到真实场景中应用。
在此背景下,作者提出了一种基于DAS的高速公路车辆轨迹提取方法,并适用于真实的高速公路环境。首先,利用基于 Φ-OTDR原理的DAS检测设备和高速公路通信光纤中的空闲纤芯,实时地采集车辆行驶时引发的地面振动信号;其次,由于DAS系统受到实际高速公路复杂环境中的相干噪声和系统自带的白噪声等因素的影响,所采集的信号非常复杂且不直观,信噪较低,直接提取车辆轨迹效果不佳,因此,提出了一种基于S变换的车辆轨迹增强算法。最后,提出了一种基于Radon变换的车辆行驶轨迹提取算法,将在时空2维信号中车辆轨迹提取转化为多次波分离的问题,即DAS系统所测量的不同的车辆行驶轨迹的时空2维响应信号,通过Radon变换,被转化为距离-速度域中不同的奇异点,从而达到了无监督地分离及提取车辆行驶轨迹的目的。
1 基于DAS的高速公路车辆轨迹提取方法
作者提出的基于DAS的高速公路车辆轨迹提取方法,包含DAS系统采集信号、基于S变换的轨迹增强、基于Radon变换的轨迹提取3个模块,其流程如图1所示。

图1 基于DAS系统的高速公路振动监测方法Fig.1 Monitoring solution of vibration on highway based on DAS
1.1 DAS车辆振动监测原理
脉冲激光器沿着光纤发出高度相干的探测光脉冲信号,探测光脉冲在光纤内传播的过程中会发生散射现象。当车辆行驶路过传感光纤所铺设的路段时,车辆产生的振动会通过路面引发光纤内部诸如折射率、拉伸长度等原本稳定的特性发生变化,从而后向瑞利散射光波的相位和光强也会发生变化。因此,通过检测光纤中散射光的偏振、相位以及光强等信息,可实现对沿光纤分布的应变、振动等参数的测量,从而达到跟踪车辆位置的目的。
1.2 基于S变换的车辆行驶轨迹增强方法
S变换是一种时频分析方法,它提供了一种同时从时域和频域对信号进行观测的方法,被广泛应用于地震薄层识别、地震信号反衍,雷达目标识别、电能质量检测等领域,在扰动检测领域独具优势。鉴于DAS系统所测量的车辆行驶产生的路面振动信号其本质是一种扰动信号,作者在S变换的基础上提出一种车辆轨迹信号增强的方法。首先,对第 k个通道的振动信号 xk(t)进行S变换:

式中,Xk(f) 为 xk(t)的频谱。S变换克服了短时傅里叶变换窗函数时宽固定不变的缺陷,能根据频率变化而自适应地调整窗函数的时宽,因此,满足了在信号变化剧烈的高频区域具有更高的时间分辨率,在变化缓慢的低频区域具有更高的频率分辨率。
车辆产生的振动信号主要由车辆发动机工作时自身的振动对地面周期性的冲击和车辆行驶时车胎与地面摩擦引起的地面振动组成。车辆自身的振动主要由低频分量组成。而车轮有规律地拍打高速公路地面引起的振动与车速有关,由于高速公路上车速大致分布为20~200 km/h,车轮直径大致在60~80 cm不等,所以车轮拍打的频率范围为10~100 Hz。因此,在t 时刻车辆行驶所引发的振动能量可以表示为t时刻S域10~100 Hz频谱的能量和,即:

因此,本文方法在实现车辆轨迹增强的过程中,首先,逐通道地利用S变换将单个通道的振动信号变换到S域;然后,通过硬阈值法抑制S域中较小分量保留较大分量,并按照式(4)累积车辆振动信号所处频域区间内的能量;最后,堆积 N个通道的振动能量Pk,k=1,2,···,N 形成时空2维振动能量响应 P为:

1.3 基于Radon变换的车辆轨迹提取方法
车辆的行驶轨迹实际上就是车辆在行驶过程中的位移时间关系。如图2所示,车辆在高速公路上行驶时引发的路面振动的位置随着时间而变化,则牵引光纤发生振动的位置也将随着时间而变化,因此车辆的轨迹在DAS系统所捕获的时空2维振动信号中体现为一些与速度相关的曲线。当时间较短时,车辆在高速公路上的行驶速度近似不变,此时车辆的行驶轨迹近似为直线,因此,在时空信号中提取车辆轨迹可以转化为直线检测或者多车辆行驶轨迹分离的问题。

图2 时空2维振动信号中汽车行驶轨迹示意图Fig.2 Diagram of vehicle trajectory in spatio-temporal two-dimensional vibration signals
Radon变换是一种经典的多次波分离的方法,也称 τ-p变换,最早用于地震信号分析中的多次波和一次波分离,其正变换定义为:
式中,R(τ,p)为 线性Radon变换域内的结果,u(t,x)为观测信号, x为空间偏移量, t为时间偏移量, τ为时间轴上的截距, p为斜率。由式(6)可得,线性Radon变换实际上是沿着直线进行积分,将2维观测信号中的直线能量累积成峰值。
当时间较短(如20 s内)时,车速近似不变,时空2维振动信号中车辆行驶轨迹表现为直线,其斜率与速度相关,可表示为:

式中: v为速度,-56 m/s≤v ≤56 m/s,即汽车双向行驶的最高速度; x 为空间距离变量, 0 ≤x ≤L,其中, L为DAS系统中传感光纤的总长度; t为时间变量,0 <t ≤20 s; d为空间轴上的截距。
由于DAS信号是以空间采样间隔 Δx和时间采样间隔 Δt 进行采样的(文中 Δx=5 m, Δt=1 000 Hz),令:,


对时空2维振动能量响应信号P(tn,xm)进行如式(15)所示的变换后,车辆行驶轨迹将转化为距离-速度域中的奇异点。那么,在距离-速度域中,能量大的分量表示由该参数(速度与截距)描述的行驶轨迹的振动能量强烈,能量小的分量则表示该参数描述的行驶轨迹上振动能量微弱。因此,通过对振动能量在距离-速度域内的分布进行遍历搜索,提取出局部极大值点,即得到车辆行驶轨迹 x=vt+ρ及 其车速v。
2 实验结果及分析
2.1 实验设置
为了验证所提算法的有效性,在四川省成自泸高速公路上选取了一段掩埋在道路中央的空闲通信纤芯作为待测光纤,如图3所示,利用光纤耦合器将待测光纤接入分布式光纤传感检测实验设备,以对高速公路路面振动进行连续监测。

图3 实验现场Fig.3 Scene of experiment
该DAS传感检测实验设备,如图4所示,利用 ΦOTDR原理设计,安装在高速公路旁的通信机房,其时间采样频率为1 kHz,6 000 m长的监测光纤被虚拟成1 200个光纤阵列(通道),阵列的空间间隔为5 m。
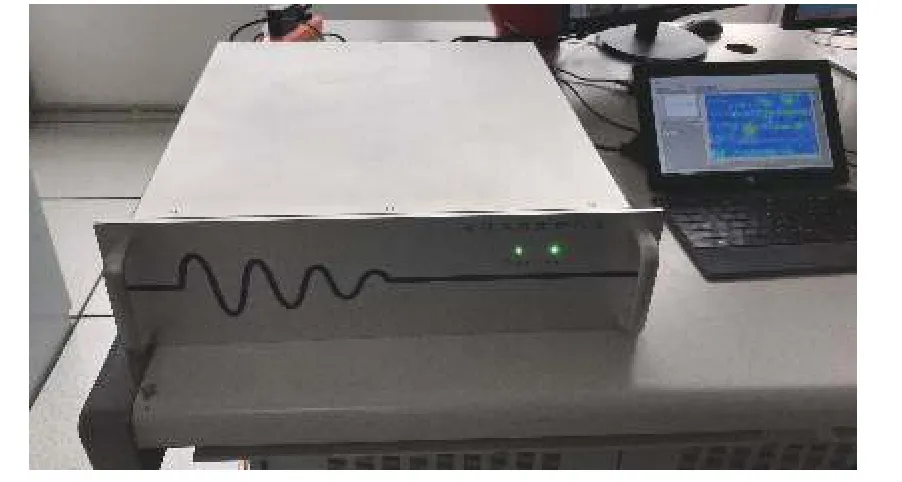
图4 振动传感单元Fig.4 Vibration sensing unit
2.2 车辆行驶轨迹增强实验结果及分析
空间上第k 个通道的振动信号分别如图5所示。
由图5可以看到,Pk(t)(图5(b))与原始时域信号(图5(a))的分布规律是一致的,当t时刻存在扰动时,该时刻的能量值较大,且均匀的分布在10~100 Hz的频率分量上,从而振动能量值累积较高;反之不存在扰动时,该时刻的能量值较小。因此,可以得出Pk(t)在一定程度上能抑制噪声能量和车辆自身振动能量,而增强车辆行驶产生的振动能量。
为了验证本文方法在行驶轨迹增强上的性能,使用小波变换对时空2维振动信号进行去噪,并与本文方法进行了比较。图6分别为原始的1 200个通道的振动信号、经小波变换去噪的信号及S域频谱能量和。图6所示的颜色越暖表示该时空产生的振动越强,反之颜色越冷表示该时空产生的振动越弱。如图6(a)所示,分布式光纤传感器在高速公路上采集的时空2维振动信号相当复杂,车辆行驶过程中产生的振动轨迹不明显。如图6(b)所示,经过小波变换后,少部分噪声被移除了,但是车辆轨迹仍然不明显。如图6(c)所示,在S域累积的振动能量响应图中车辆轨迹十分明显。
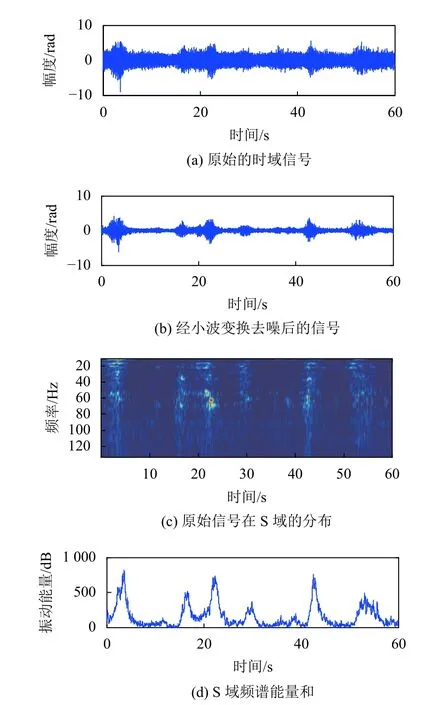
图5 单个阵列单元振动信号的处理结果Fig.5 Vibration signal of a single array unit and its resultsprocessed by wavelet and proposed method
为了进一步客观地评估本文方法对车辆行驶轨迹的增强效果,首先将DAS系统所采集的1 h的振动信号平均分割成60个时空2维信号,统计原始时空2维振动信号、小波变换去噪及基于S变换增强后这3类信号的平均熵值及平均局部对比度增强指标,结果见表1。表1中,信息熵 H是信号所含的信息量的度量:

由式(16)可知,熵越大,信号中包含的信息量越丰富,目标越多,分布越均匀。局部对比度增强指标CI[23]定义为:

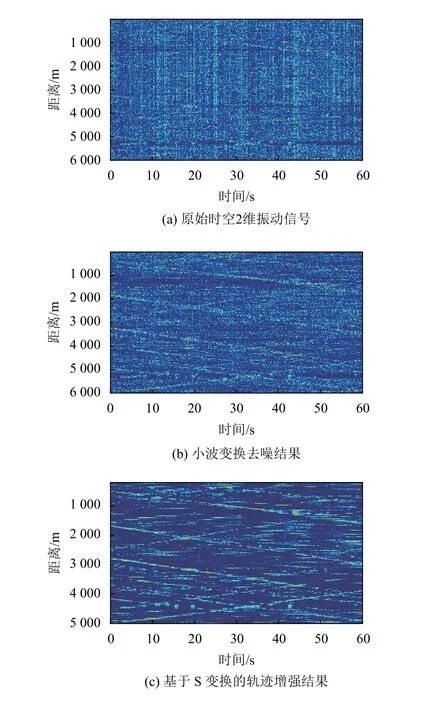
图6 本文方法与小波变换在行驶轨迹增强上的性能比较Fig.6 Performance comparison between wavelet and the proposed method in vehicle trajectory enhancement
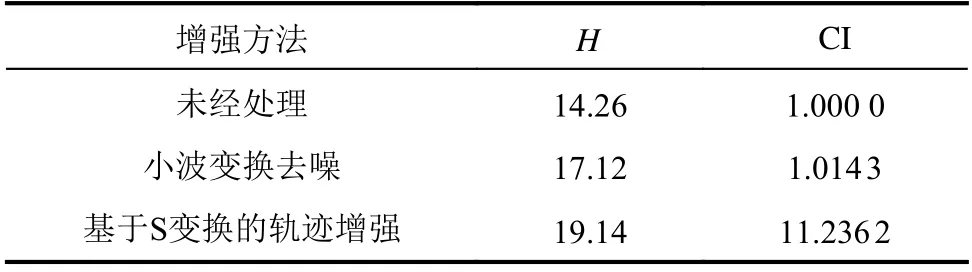
表1 本文方法与小波变换在轨迹增强上性能比较Tab.1 Comparison of trajectory enhancement performancet by the proposed method and wavelet transform

从表1可以看出,与原始信号相比,经作者所提轨迹增强方法和小波变换处理后,减少了大量低值的背景噪声,使得时空2维信号的分布更均匀,因此提高了熵值,增加了轨迹与背景间的对比度。此外,作者所提的轨迹增强方法不仅抑制了背景噪声,同时振动能量累积过程中的对数函数可避免低振动能量淹没在高振动能量中,因此,本文方法性能最佳,这是由于其不仅继承了S变换在扰动检测方面的优势,而且充分考虑了车辆行驶产生的振动的特性。
2.3 车辆轨迹提取实验结果及分析
当时间较短时,车速近似为匀速运动,将图6的前20 s时空2维原始振动信号、经小波变换去噪、本文方法增强后的信号在Radon域投影,得到其分布分别如图7、8、9所示。其中:Radon域2维展示中的颜色越暖表示车辆轨迹参数的概率越高,反之颜色越冷表示车辆轨迹参数的概率越低;3维展示中极大值点表示时空域中车辆行驶轨迹参数。

图7 原始振动信号在Radon域中的分布Fig.7 Distribution of original vibration signal in Radon domain
如图7所示,将时空2维振动信号直接分解到Radon域中,由于低值噪声均匀的分布在时空2维信号中,因此整个噪声能量和小部分车辆行驶轨迹均被积累起来形成局部峰值。由于小波变换也能去除部分噪声,但车辆轨迹并未得到增强,因此仅有少部分车辆轨迹能被积累成了局部峰值,而大部分车辆轨迹仍被淹没在背景中,如图8所示。经过作者所提基于S变换的轨迹增强方法进行增强后,车辆行驶轨迹在Radon域中被积累形成了多个局部峰值,因此达到了多车辆行驶轨迹分离的目的,如图9所示。原始的振动信号与经小波变换去噪后的振动信号在Radon域中分布更均匀,而经本文方法增强后的振动信号在Radon域中,局部峰值明显,这进一步证明了本文方法能有效地对车辆轨迹进行增强。

图8 经小波变换去噪后振的动信号在Radon域的分布Fig.8 Distribution of vibration signal denoised by waveletin Radon domain
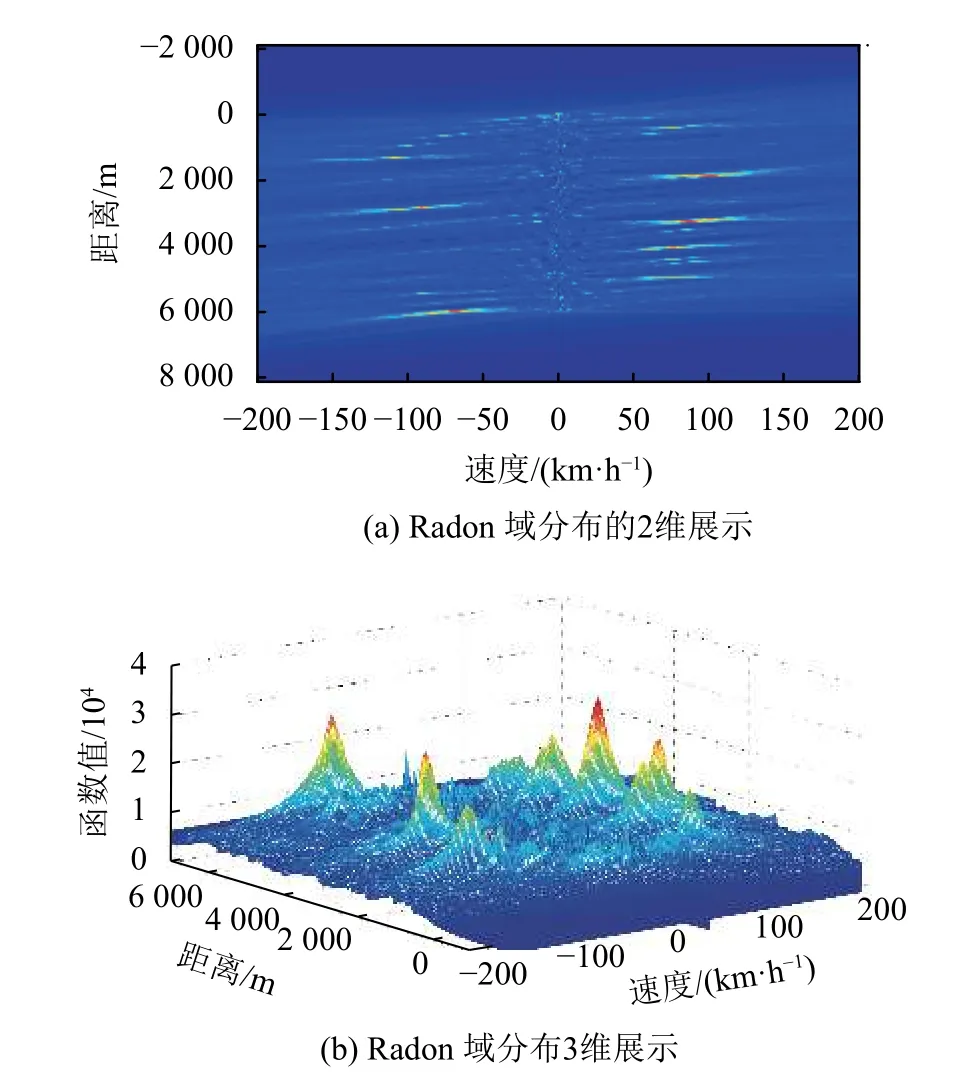
图9 经S变换增强后的振动信号在Radon域的分布Fig.9 Distr ibution of vibr ation signal enhanced by S transform in Radon domain
在Radon域中检测局部极大值点,即可得到包括速度和截距的车辆轨迹参数,如表2所示,通过Radon变换车辆轨迹在Radon域积累了19个极值点。表2中,车辆的行驶方向由速度符号表示,即车辆由近及远行驶的速度为正,车辆由远及近行驶的速度为负。最后,将检测到的Radon域的局部极大值点投影到DAS传感系统时空域,即车辆在该段时间的行驶轨迹,结果如图10中红色线段所示。由图10可知,表2中所提取的车辆轨迹参数表示了DAS时空2维信号中所有的车辆轨迹,说明本文方法能有效提取高速公路上的车辆行驶轨迹。

表2 基于Radon变换提取的车辆轨迹参数Tab.2 Parametersof vehicle trajectory by Radon transform
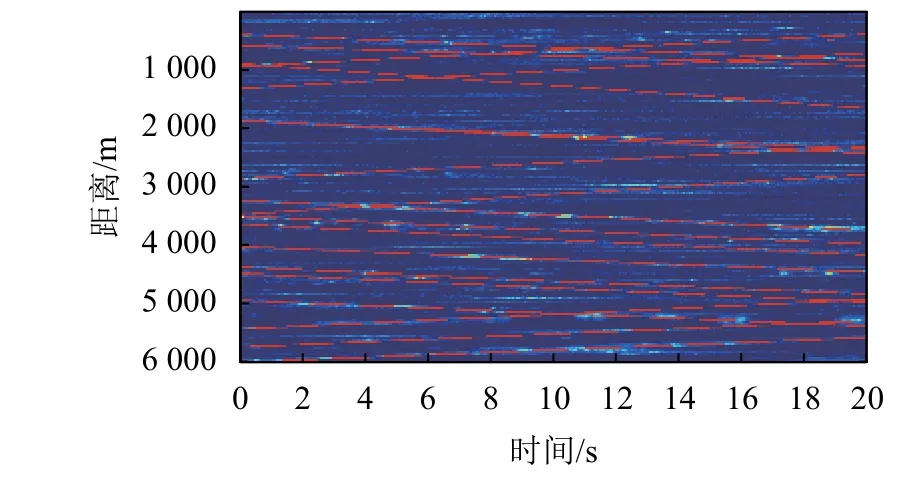
图10 基于Radon变换的车辆轨迹提取结果Fig.10 Result of vehicle trajectory extraction based on Radon transform
由于Hough变换也是一种检测图像中诸如直线、圆等特征的经典方法。以检测直线为例,Hough变换先将图像空间中的直线变换到参数空间中,再通过检测参数空间中的极值点确定出该直线的描述参数,从而提取图像中的直线。经作者所提基于S变换的轨迹增强方法增强后振动信号在Hough空间的分布如图11所示。由图11可知,对增强后的DAS振动信号进行Hough变换后,绝大部分车辆的行驶轨迹在Hough空间中形成相应的极值点,但干扰也形成了相应的极值点。这是由于Hough变换相较于Radon变换对噪声更为敏感的原因。同时,Hough变换需先对信号进行阈值化处理,该步骤增加了算法的复杂度,阈值的选取也较大地影响了后续直线检测的性能(本实验中采用OTSU自动阈值分割方法进行阈值化处理)。从图11(b)可看出,Hough域中局部峰值较多,对比图9和11可以发现Hough变换,积累的局部高峰峰形更宽,而Radon变换积累的局部高峰峰形更聚集,说明通过Radon变换提取的车辆轨迹参数精度更高。

图11 经本文方法增强后振动信号在Hough空间的分布Fig.11 Distr ibution of vibr ation r esponse ener gy in Hough space
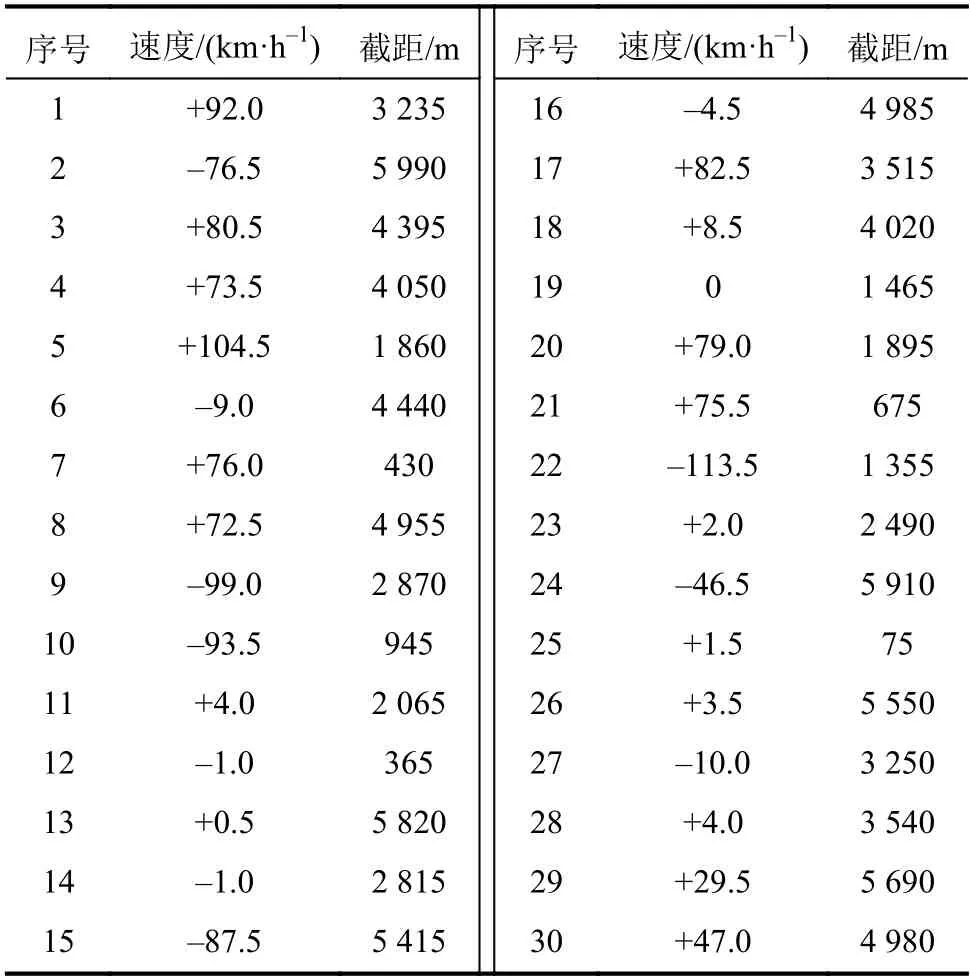
表3 基于Hough变换提取的车辆轨迹参数Tab.3 Parametersof vehicle trajectory by Hough transform
取Hough空间分布(图11(b))中能量最大的前30个局部极大值,提取相应的车辆轨迹参数,如表3所示。表3中,正负号含义同表2。最后,将表3中局部极大值点投影到DAS传感系统时空域,结果如图12中红色线段所示。从图12和表3可知,基于Hough变换提取车辆轨迹的方法会错误地将沿着时间轴分布的振动能量当成车辆轨迹。而从图10和表2可以看出,沿时间轴分布的振动能量并未在Radon域中积累成高峰。因此,基于Radon变换的车辆轨迹提取方法的抗干扰能力要强于Hough变换。

图12 基于Hough变换的车辆轨迹提取结果Fig.12 Result of vehicle trajectory extraction based on Hough transform
3 结 论
作者提出了一种适应于真实高速公路交通环境的车辆行驶轨迹提取方法。该方法首先利用高速公路通信光纤中的空闲纤芯及基于Ф-OTDR原理的DAS检测设备实时地监控车辆行驶时产生的地面振动;然后,通过在扰动检测领域独具优势的S变换抑制实际高速公路复杂环境中的相干噪声和DAS系统自带的白噪声等,并增强车辆行驶产生的振动信号,从而提高了车辆轨迹与背景间的对比度;最后,通过对噪声不敏感的Radon变换多车辆行驶轨迹进行分离,并使用检测Radon域中的极值点来无监督地提取车辆行驶轨迹。在真实的高速公路环境中对所提出的基于DAS的车辆轨迹提取方法进行了验证。实验表明,所提方法能有效增强车辆行驶轨迹,且正确地提取车辆轨迹及其参数,具有很好的可实现性和迁移性,为实现长距离的车辆轨迹跟踪,探索智慧化高速公路的全时空交通检测目标,提供了一种可行的方案。
目前,仅对车辆的行驶轨迹的增强和提取进行了研究,未来可以通过将DAS产生的2维时空信号和交管部门的交通数据进行关联学习,如进一步估计路段的拥堵程度、车流量等。
