“雪龙2”号科考作业协同管理平台设计与实现
2021-03-27王硕仁陈清满于化冰张永正宋栋芳
王硕仁 陈清满 于化冰 张永正 宋栋芳
研究论文
“雪龙2”号科考作业协同管理平台设计与实现
王硕仁1陈清满1于化冰2张永正2宋栋芳2
(1中国极地研究中心, 上海 200136;2大连陆海科技股份有限公司, 辽宁 大连 116085)
“科考作业协同管理平台”以国家极地战略需求为导向, 以“雪龙2”号极地科考破冰船为对象, 按照科考破冰船的航行与科考作业要求, 针对“科考协同作业”问题进行协同创新与应用研究, 切实提高我国极地科考能力水平。通过分析科考航次计划执行与管理活动, 提炼核心管理要素和业务流程, 在充分调查与梳理中国极地研究中心“业务化调查”历史文件的基础上, 采用统一建模语言UML (Unified Modeling Language)[1], 总结和分析极地科考业务, 提出解决科考业务核心需求“协同作业”的业务架构设计, 并在此基础上提出管理平台的技术架构, 最终为实现极地科考破冰船科考任务的全过程管理奠定良好的基础。
科考破冰船 科考业务架构 科考协同作业
0 引言
“雪龙2”号极地科学考察船是中国第一艘自主建造的极地科学考察破冰船, 是全球第一艘采用船艏、船艉双向破冰技术的极地科考破冰船。2018年9月10日, “雪龙2”号极地考察船下水, 标志着我国极地考察现场保障和支撑能力取得新的突破。“雪龙2”号现已完成建造, 并顺利完成第36次南极考察任务。
“雪龙2”号综合信息网络系统以船岸一体化应用业务为核心, 统一规划、统一建设、统一管理, 建立高度融合、互联互通的船舶信息网络系统。系统满足船舶管理、极区航行、大洋调查等业务信息化需求。
船端系统整合船舶信息资源, 建成符合极地考察应用特点和发展要求的现代化科考船综合信息支撑平台, 实现现代化科学考察船的综合信息管理, 满足新建破冰船极区通信管理、科考数据管理、科考作业管理、船舶综合管理等多业务信息化需求。
陆地端的系统建设兼顾“雪龙”号船舶的信息接入[2]、岸端中心对多船管理等需求, 推动了极地考察船信息化的发展, 增强极地考察船业务能力和支撑保障能力, 为智能[3]极地考察船的建设奠定基础, 进而推动我国极地考察事业的发展。
“科考作业协同管理平台”作为极地业务化工作体系, 依托“雪龙2”号船舶基础管理平台, 必须同时满足极地中心陆地端和船舶端对于科考计划和科考航次计划的业务化任务全过程管理的核心需求, 即从“岸端”科考计划的制定, “船端”航次计划与任务执行过程、任务协同与调度管理、任务的跟踪与监控以及科考探测数据、科考样品、实验室分析数据的管理, 再到“岸端”获得“船端”的实时数据、过程执行监控数据以及统一汇交的科考作业成果物, 一个科考航次的调查成果物包括: 文档报告、现场班报、船舶报、航迹图、测线站位表、设备调查数据资料、现场样品资料与汇交单、各类登记表等, 为各极地科考和研究业务化运行系统提供数据支持和平台服务支撑。
1 管理平台的需求分析与设计
管理平台的需求分析[1]与设计工作应针对科考船在大洋和极地水域科考调查和科考作业的特点, 结合高纬度与冰区航行的特殊性, 开展对科考航次的计划执行与管理、科考作业监控与管理、科考作业调度与指挥、科考数据管理等方面的业务流程分析。研究适应极地科考船调查作业与管理信息化建设的业务架构与技术架构, 为构建数字化、一体化、专业化、规范化的科考作业协同管理系统奠定可持续升级和扩展的基础。
业务上应兼顾综合科学调查船各学科交叉作业的特点, 统筹各学科的作业流程与相关设备。按照航次科考活动的管理者对组织和实施的管理要求, 实现科考作业任务的“可视化”管理, 使管理者能够实时掌握作业进度, 整体把控作业情况。在科考作业中, 需对作业现场统一指挥、协同管理, 包括船岸协同指挥与作业任务的跟踪与监控。开展对重大科考作业所涉及的要素和流程展开研究, 设计并实现基于电子海图、视景仿真的综合科考协同管理系统。在执行科考任务的过程中, 分布在船舶各作业区的操作人员与监控管理人员需要密切配合、协调一致, 实现科考航次计划根据现场条件的及时调整。
在整个需求整理的过程中需从3个维度, 即设备资源、信息资源、业务需求开展分析, 确定不同作业任务所要求的设备资源与信息资源, 并使用三维坐标系进行直观的展示, 采用此种方式有利于业务分析的形象化表达。图1所示为CTD(温盐深仪)作业过程中所涉及的设备资源与信息资源的相互关系。本图仅为示意图, 用于说明作业业务分析需要从3个维度进行思考。
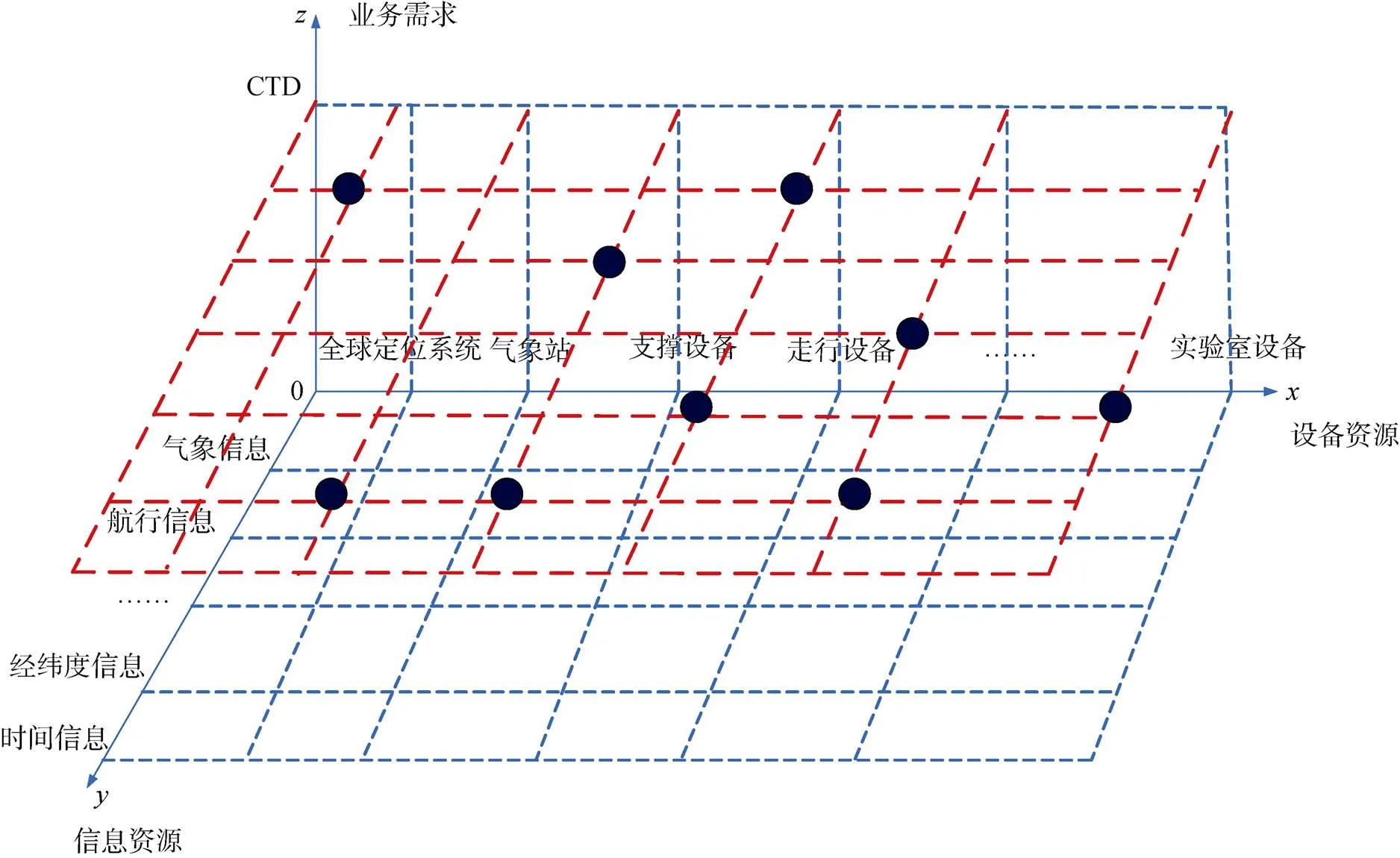
图1 开展业务分析的3个维度(示意图)
Fig.1. Three dimensions of business analysis (schematic diagram)
新建极地科考破冰船科考业务的核心需求在于“协同作业”, 具体可分为“船岸协同”与“在船协同”, 未来随着“雪龙”系列船舶数量逐步形成规模, 还将产生“船船协同”的业务需求。结合“雪龙2”号船的实际定位, 本文仅从“船岸协同”与“在船协同”的角度展开论述。业务流程包括2个部分, 一是科考业务总体流程, 二是调查作业业务流程。
1.1 科考业务总体流程
在充分调查“雪龙”船历次南北极航次历史记录[4-9]的基础上, “船岸协同”可归纳为从科考计划的制定到航次报告完成的整个业务过程, 具体包含“初始化阶段”、“计划阶段”、“协同作业阶段”、“统一汇交成果物阶段”四个阶段, 可体现为“科考业务总体流程”。
结合上述的分析内容, 首先建立科考业务总体流程, 并进一步明确总体流程与各业务操作的关系, 见图2。
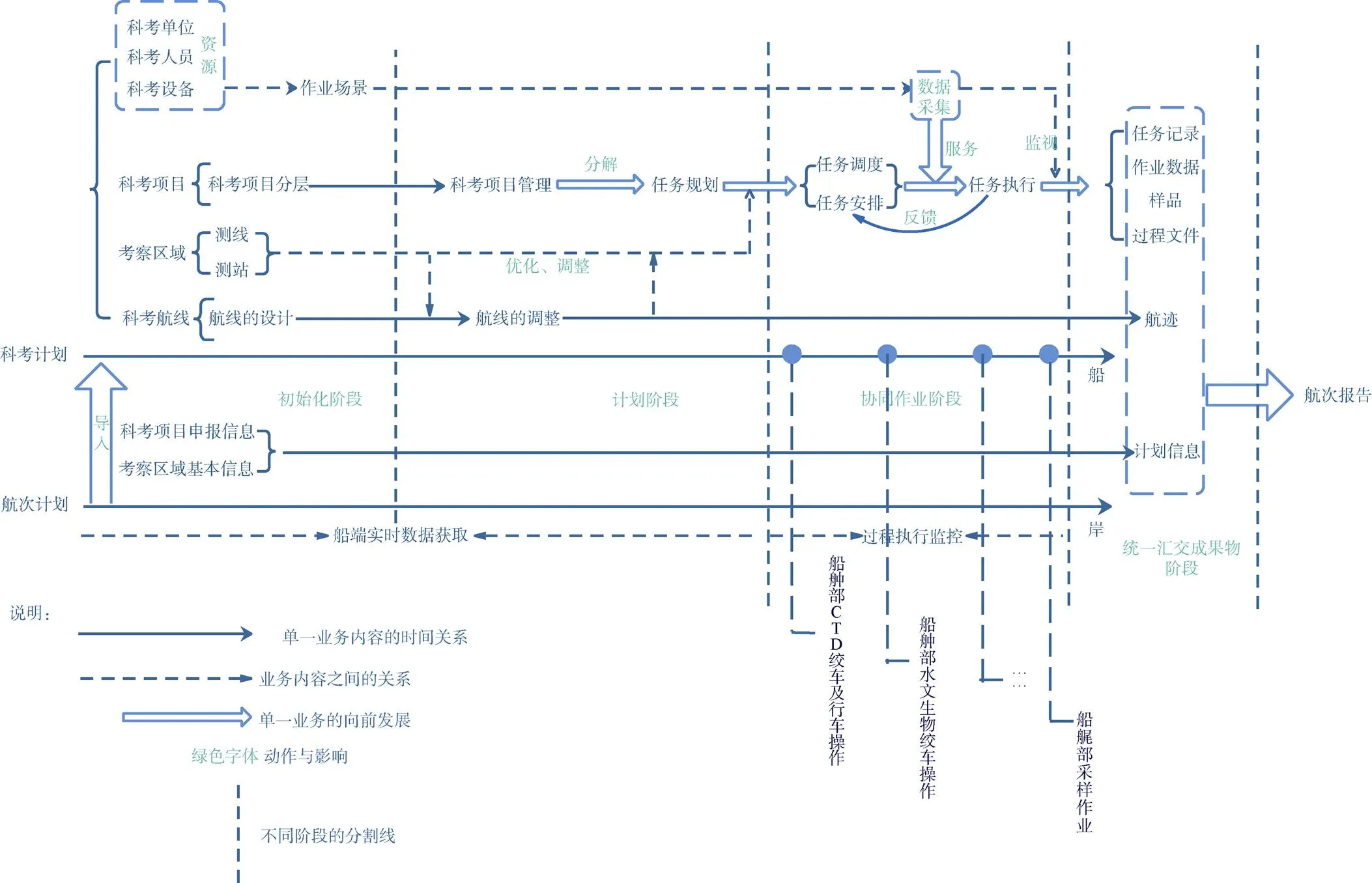
图2 科考业务总体流程与协同作业阶段不同作业之间的关系
Fig.2. The relationship between the overall business process and the different operation in the collaborative operation phase
“初始化阶段”具体表现为岸端航次计划的制定到船端确定实施计划的过程, 主要包括科考航线的确定、科考项目的划分、人员的安排、设备的使用等。
“计划阶段”具体表现为计划渐进明细的过程。依据极地考察的总体目标与重点海域的业务化调查内容与调查方法[4-9], 细化为各考察项目子课题[4-9]的专项调查任务, 实现总体方案所确定的目标。计划阶段包括调查内容、站位布设与调查方法这3部分的提交、审核、确定[9]。
“在船协同”以作业任务的形式开展, 主要集中于总体流程下的“协同作业阶段”完成, 可归纳为不同学科作业计划的执行与管理, 各类设备资源的分配与协同使用以及数据成果物的共享等业务内容。在“中国第四次北极科学考察”[4]中, 整个航次包含10种不同作业部位和作业种类的作业内容, 下文将以CTD作业[4]为例对作业业务展开分析。
“统一汇交成果物阶段”汇交范围和内容涵盖航次调查资料、航次调查、室内分析处理资料和航次调查成果。成果物主要包括航次设计、导航定位、走航及航渡观测、现场作业班报和记录等原始资料及处理结果、经整编后的航迹数据、现场工作总结及技术总结等[10], 最终形成航次报告。
整个流程中, 不同阶段彼此间存在着必然的联系, 比如“协同作业阶段”中, 实施计划可根据现场作业条件进行调整, 对“计划阶段”确定的人员、设备的使用产生影响, 实现调查资源利用的最大化。
1.2 调查作业业务流程
1.2.1 业务流程
本文以CTD作业[4]为例, 针对作业任务中“协同作业”相关的业务需求展开归纳与分析。
CTD作业业务包含功能性业务与业务支撑数据流, 需满足CTD现场作业的功能需求、船岸作业监督、协同管理的需要。CTD作业业务分为三个阶段: CTD作业计划阶段、CTD协同作业阶段、CTD成果物汇总审核阶段。各个阶段在岸端提供对应监视、同步功能, 岸端系统使用者可以实时了解船端CTD的作业情况。
CTD作业作为科考航次[11]作业的典型关键部分, 需要以航次计划、站位[11]布设计划作为前提, 其中CTD作业计划、CTD作业协同、CTD作业成果物部分使用实时数据监控、实时视频监控的方法提供船岸协同功能。图3所示为CTD作业业务流程图, 包括“船岸协同作业”与“在船协同作业”。
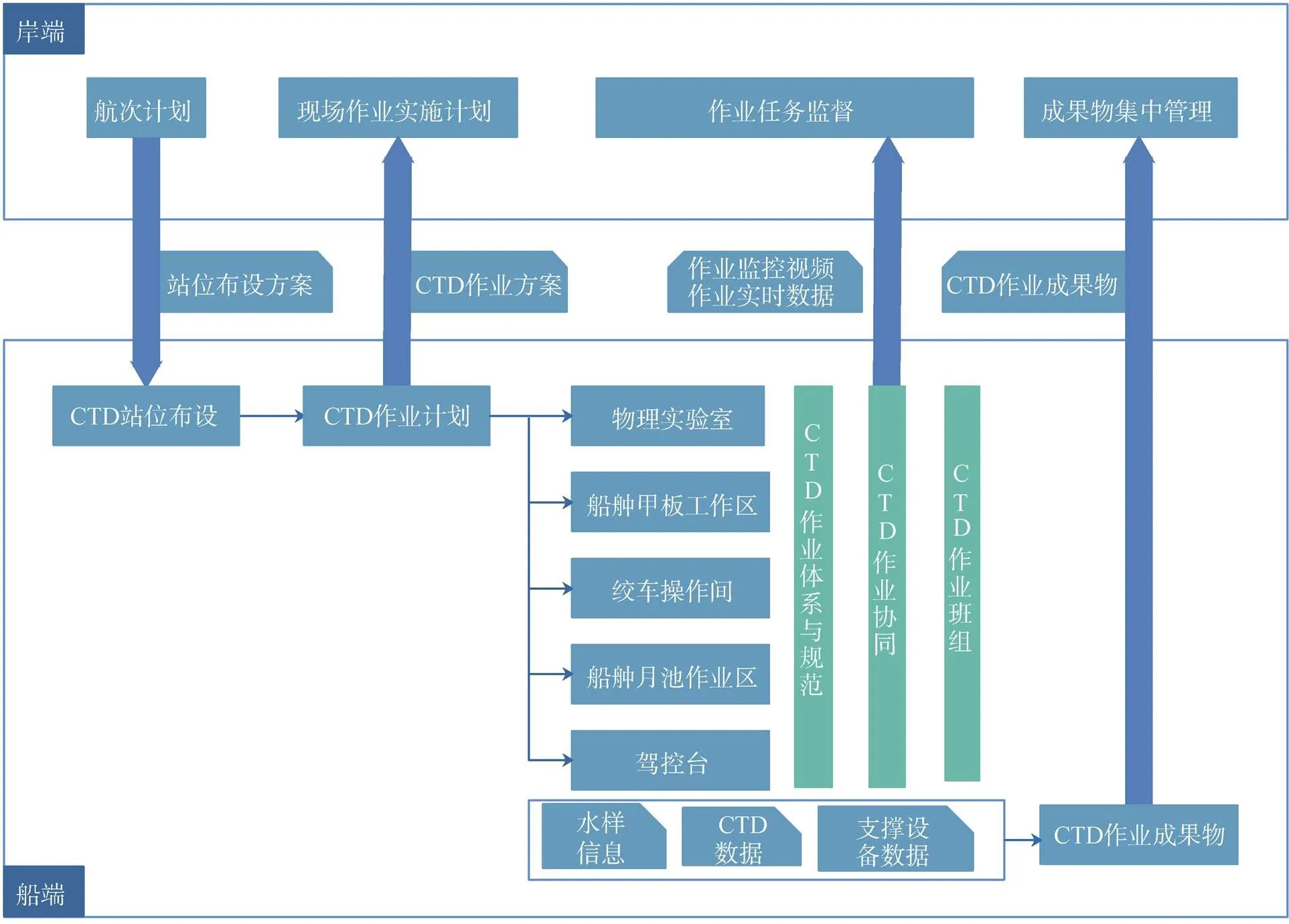
图3 CTD作业业务流程图
Fig.3. CTD operation business flow chart
1.2.2 数据流向
物理实验室作为CTD作业指挥中心, 接入气象、海况、海冰等极区环境预报和现报, 接入船载航行实时动态、CTD作业支撑设备数据(科考用定位数据、姿态数据、水深数据、绞车数据)。在物理实验室中提供集成数据环境, 为作业指挥提供便利。
向现场作业位置提供作业相关性数据, 向绞车间提供专业水深数据, 防止CTD架触底; 向作业甲板提供CTD绞车运行数据等。数据流向图见图4。
1.2.3 调查作业的管理范围
航次[11]中所有的CTD作业全部结束后, 通过进行CTD作业的数据成果物、作业记录的表单提取, 可以为航次报告中涉及CTD部分的相关内容提供支撑, 航次报告内容会涵盖CTD实施计划、CTD作业记录、数据统计、数据分析等多类别、多种数据格式的信息。
CTD作业的整个管理范围包含: CTD作业计划、CTD作业体系与规范、CTD作业协同、CTD作业班组、CTD作业成果物。对上述内容进行类图(图5)分析, 为系统设计建立良好的基础。
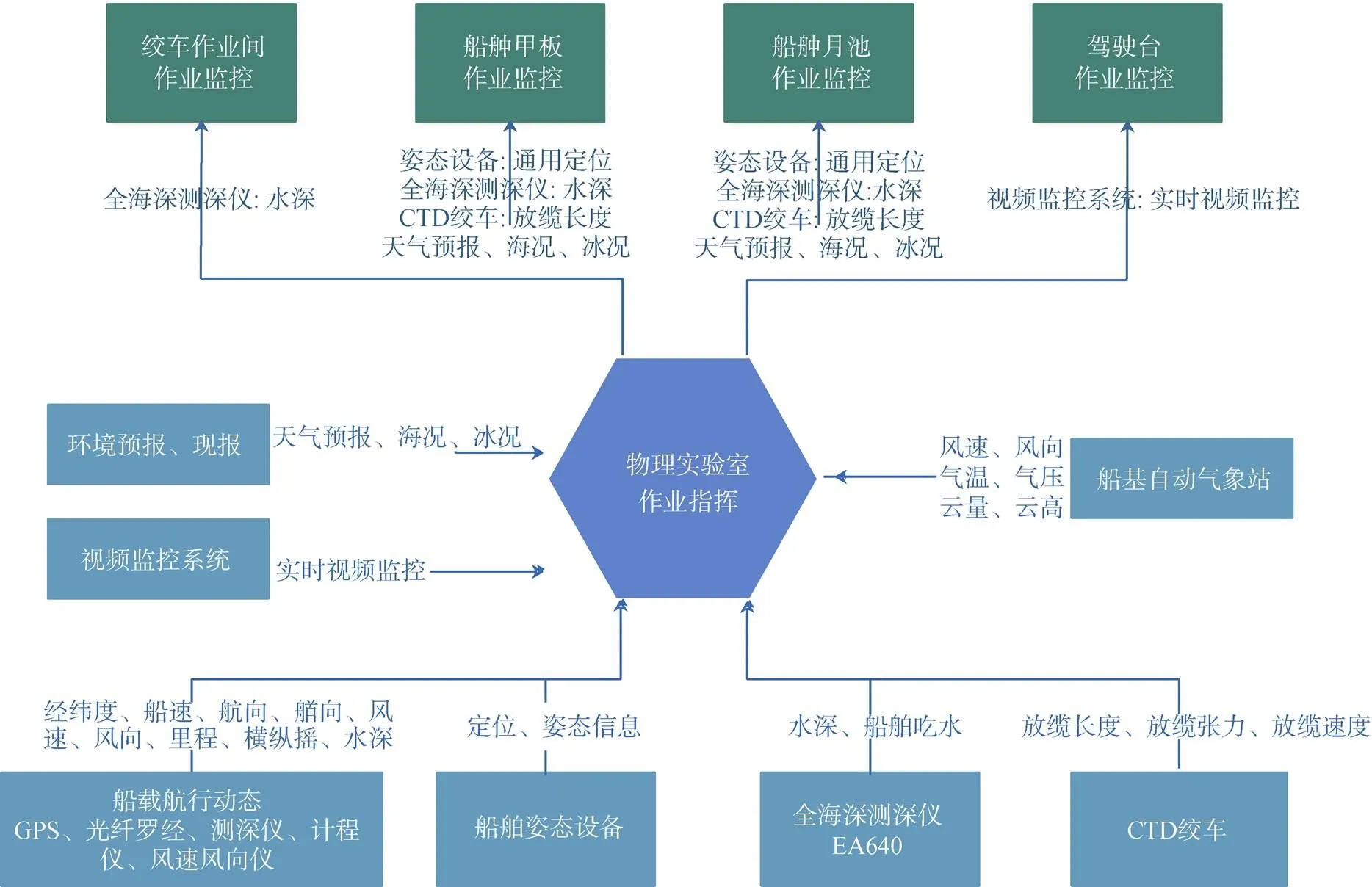
图4 CTD作业数据流向图
Fig.4. CTD operation data flow diagram
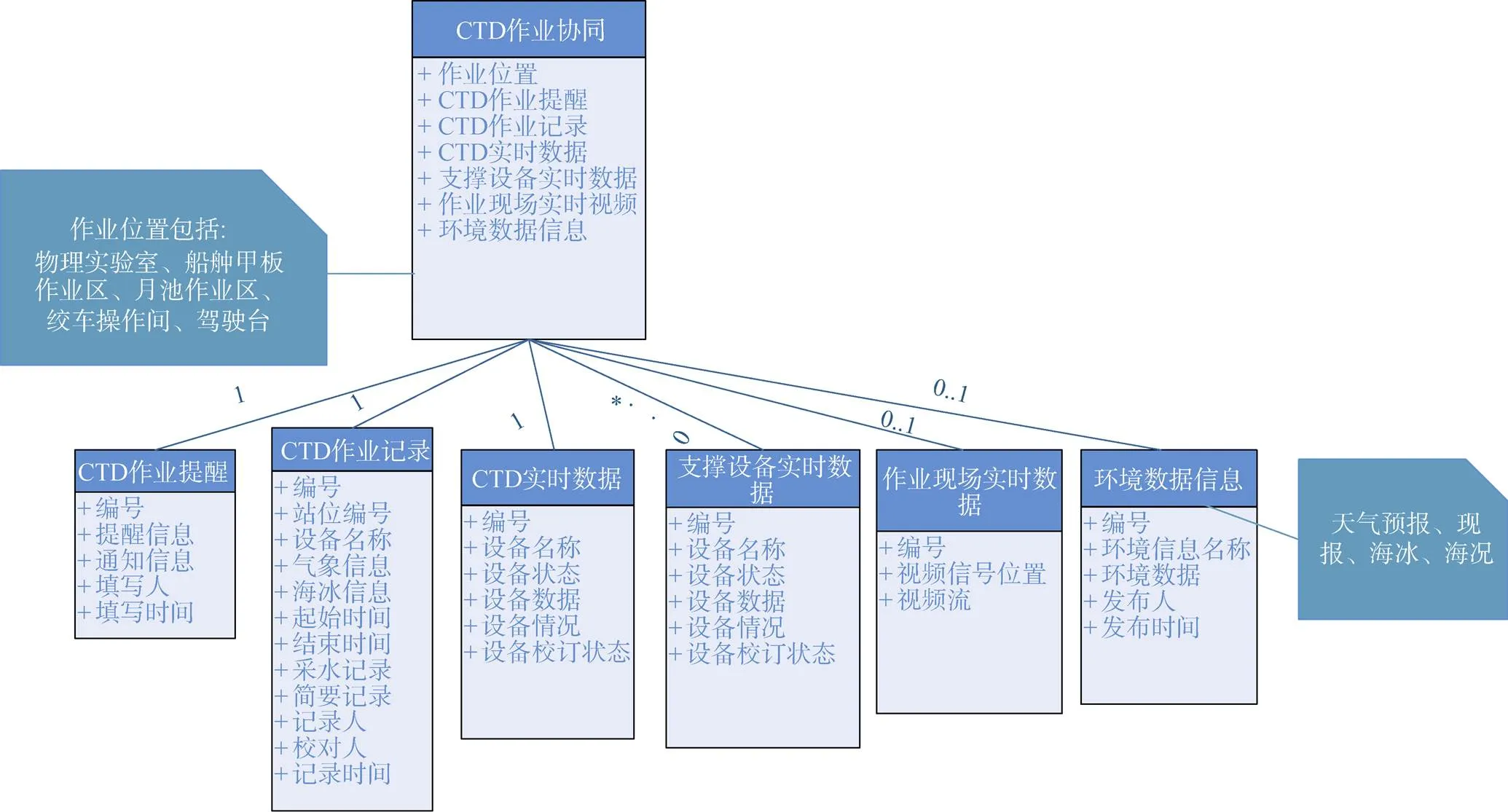
图5 CTD作业协同类图(示例)
Fig.5. CTD operation collaboration class diagram (example)
1.2.4 审批流程
在实际作业过程中, 仅提取CTD作业计划申请审核流程与CTD成果提交审核流程。其中CTD协同作业阶段由于作业过程的复杂性、紧急性等业务特点, 以作业提醒、作业监视作为系统功能, 不宜使用复杂的业务流程进行管理。如果在协同作业阶段存在关键节点需要使用审批流程管理, 可以适当增加。
1. 作业计划申请审核流程[4]
作业班长制定了CTD作业计划后, 将CTD作业计划提交审核, 由首席助理根据实际情况判断是否可以按照计划进行CTD作业。将审核结果反馈至作业班长, 完成审核流程。
2. 成果物提交审核流程[4]
CTD作业完成后, 由CTD数据终端人员提交CTD作业记录、CTD温深盐数据, 甲板操作员提交水样信息, 由作业队长判断数据准确性、完整性。如果成果物异常, 可能需要检查故障、重新制定作业计划。
1.2.5 业务数据
结合“雪龙2”号综合网络信息系统已建设的硬件资源, CTD作业时需要信号源提供数据支撑, 数据主要包括: 数据流、信息流、视频流等。在CTD协同作业时, 需依赖船载通导信号数据, 数据包括经纬度、时间、船艏向、航速、风速等, 还需要监控万米测深仪、高精度GPS、光纤罗经、CTD绞车等设备提供高精度经纬度数据、姿态数据、水深数据、绞车数据, 在数据监控的同时系统提供作业位置的实时监控视频信息。从而为CTD作业提供稳定高效的支撑数据。CTD数据成果物的记录一部分来自SBE911(物理海洋多参数理化数据采集与探测系统)与LADCP(声学多普勒海流剖面仪)设备, 另一部分需要记录高精度经纬度数据、姿态数据、水深数据作为支撑数据。
1. CTD作业相关信号源(表1)
CTD作业相关的设备、仪器、信号源共16种, 预计有20个信号源接入。
设备数据存在主备关系(表2), 关键设备数据需要提供备份数据源, 如UTC信息源(NTP, Network Time Provider 网络时间服务源)、定位及姿态数据源(POS-MV, 船载定位、定姿系统)、水深数据源(万米测深仪)需要提供一个以上备份数据源, 以免数据缺失。
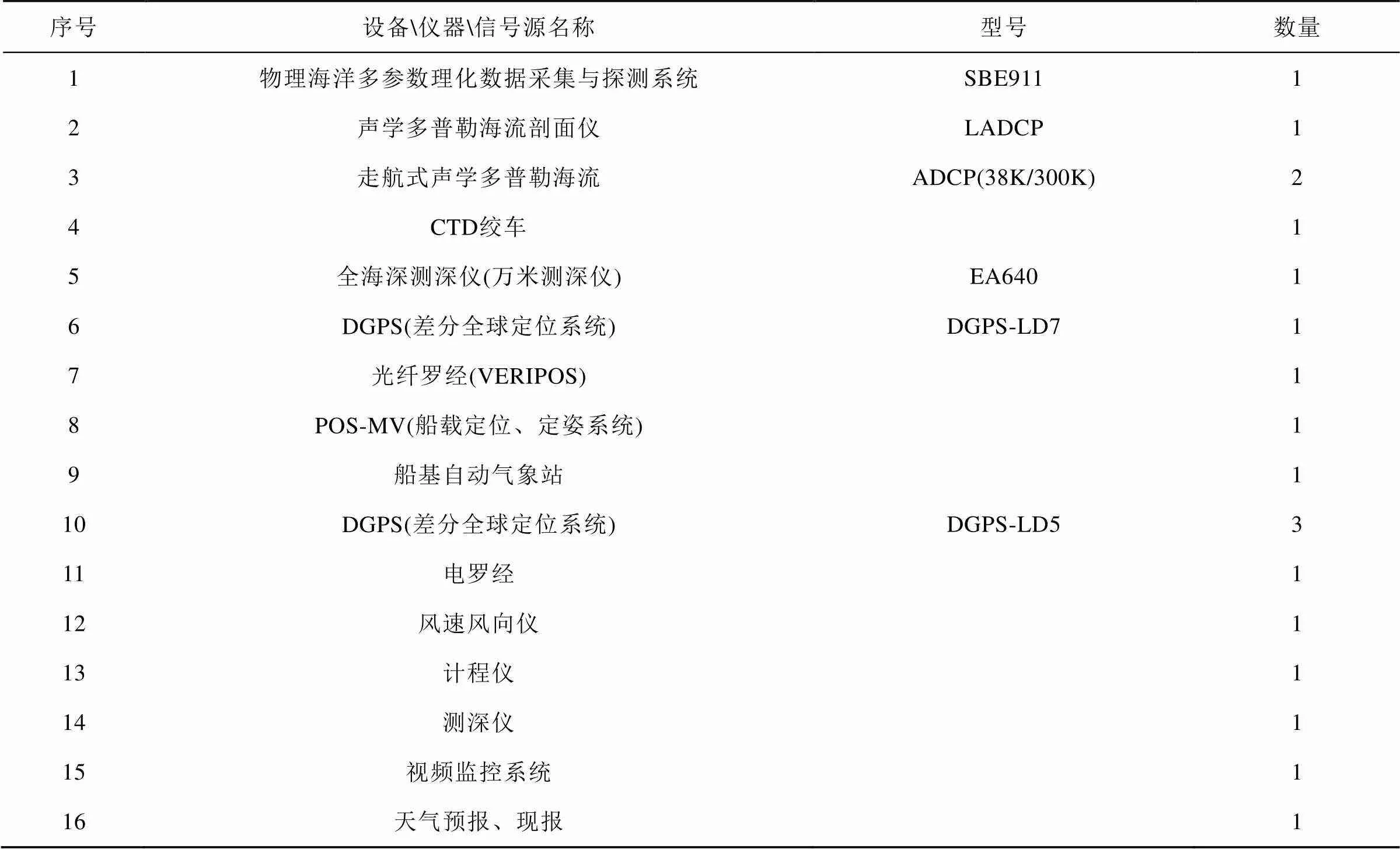
表1 CTD作业相关的设备、仪器、信号源

表2 信号源主备关系
2. CTD作业依赖参数
需要从各个信号源接入信号48项, 数据在系统中定义唯一标识符、描述信息。在系统中需要定义数据长度、数据精度、数据范围、数据单位, 用于数据接入、处理、存储、显示, 设计中数据展示精度可以低于存储精度。
3. CTD作业数据接入
对于CTD业务来说, 设备之间提供数据可能出现冗余, 需要按照业务规则确定具体的信号源, 即当数据可以由多个设备输出时, 数据需要根据设备主备关系获取; 数据源由系统日志记录; 系统可以按照CTD业务提供数据服务。
4. CTD作业数据存储
CTD业务中接入的各类数据, 一部分用于监控显示, 其他部分需要进行存储便于查询。CTD作业中用于存储、查询的数据结构应包含时空数据。
1.2.6 样品数据
在第36次南极考察过程中, 细化分析航次现场调查资料中的样品管理规范[10], 将CTD采水任务分解为采水计划与扫描入库两部分(图6), 通过业务化系统与智能手持终端设备完成水样录入与管理过程。
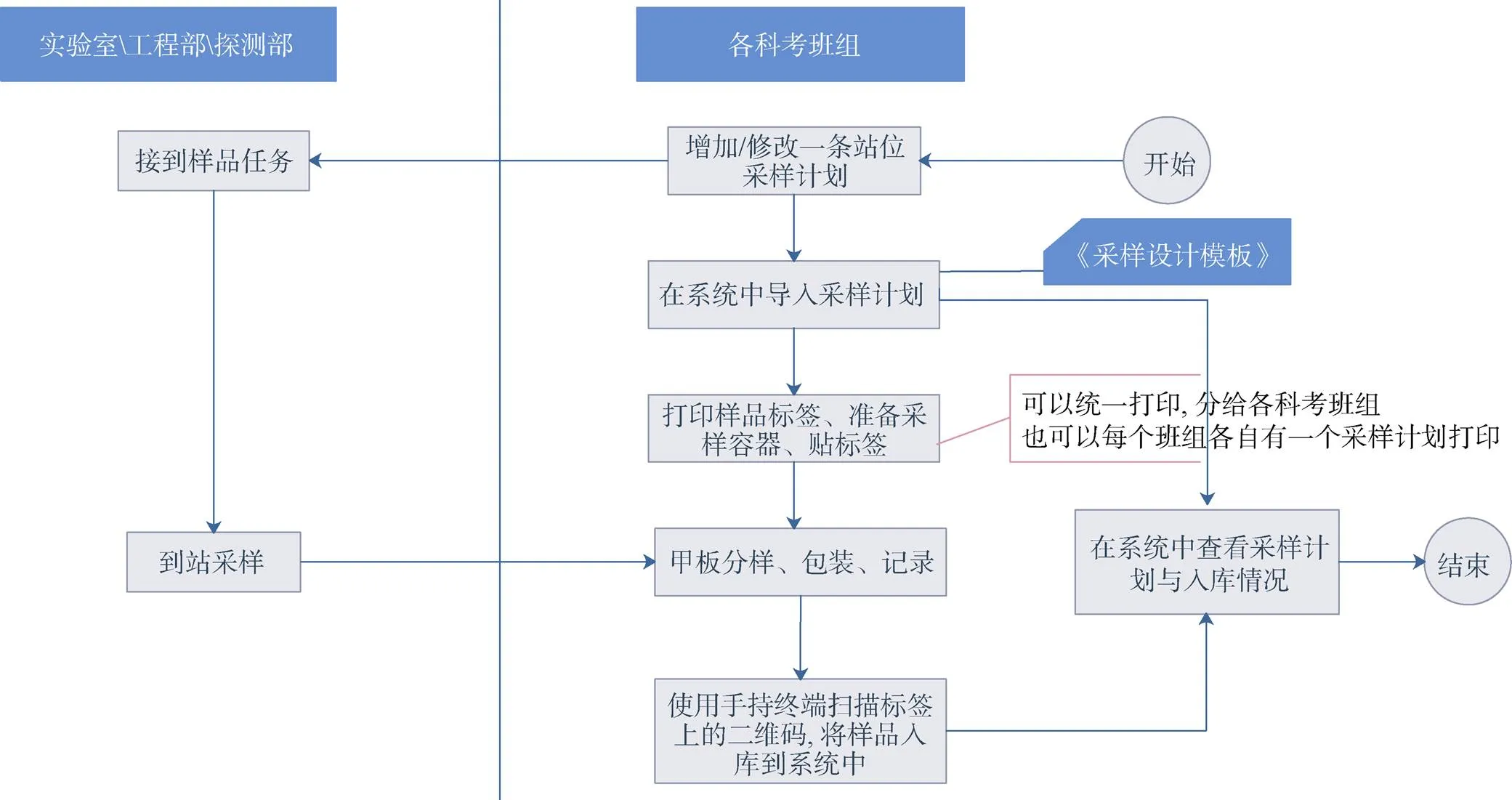
图6 采样计划与扫描入库流程
Fig.6. Sampling plan and scanning warehousing process
2 业务架构的技术实现
信息化系统需要从技术层面得到支撑, 系统建设采用面向服务技术架构[12]作为整个技术架构的骨干支撑, 快速、有效解决业务协同、资源共享以及应用支撑的架构问题。
技术架构(图7)根据建设内容可以分为数据、服务、应用3个核心结构, 主要表现为数据的采集、存储、加工与服务, 业务功能构件的封装与实现, 业务应用的功能集成与整合。
2.1 数据(D)
数据层是整个系统的数据资源中心, 涵盖管理平台中所有相关的结构化、非结构化数据, 包括与数据直接相关的所有操作, 是数据从进入系统到标准数据的追踪记录集合与操作记录集合。它是数据资源的存储和积累, 为系统应用提供标准的数据访问服务并提供备份、存储功能。
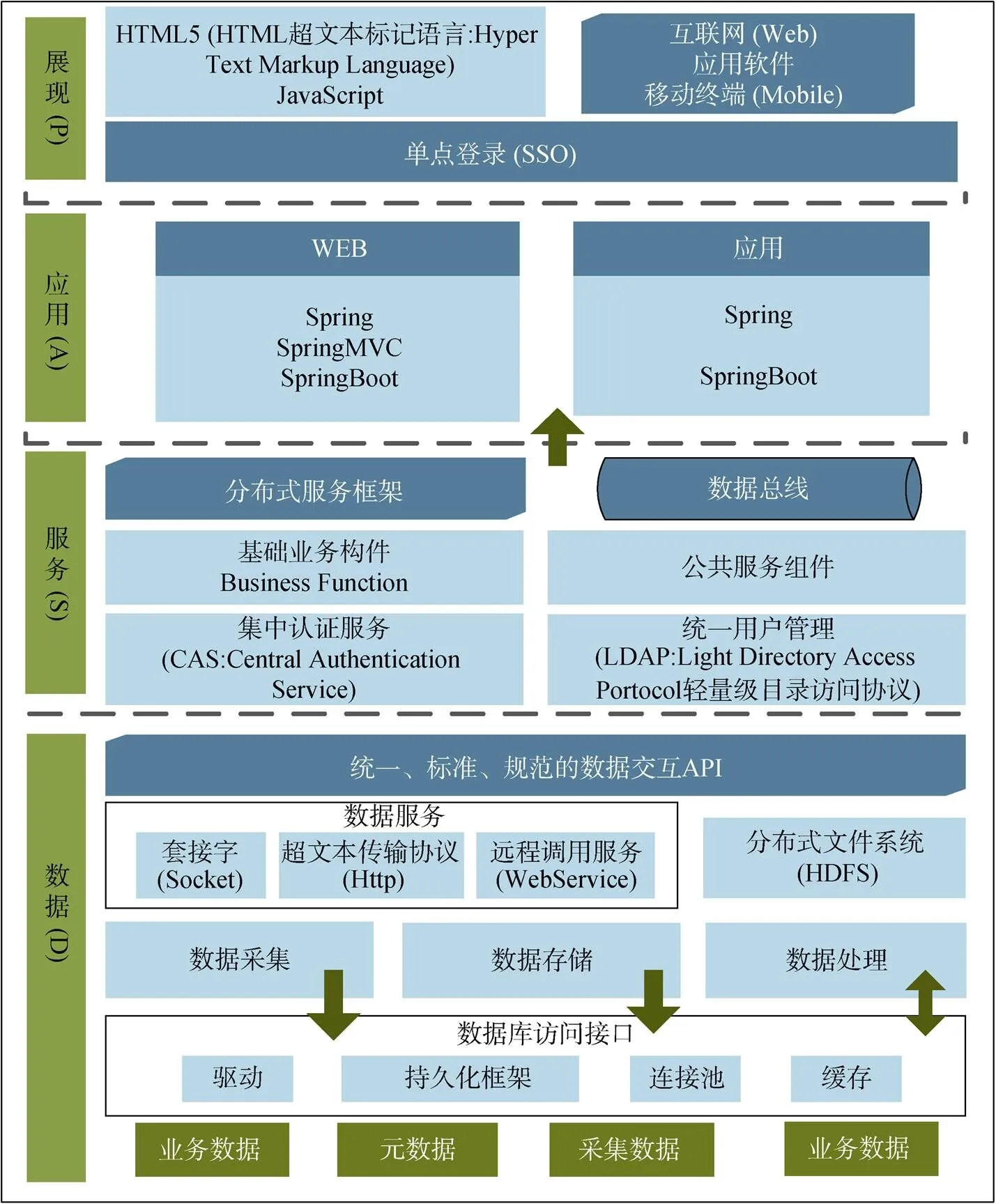
图7 系统技术架构
Fig.7. The technical framework of system
通过服务封装数据的配置接口、操作接口以及管理接口, 既可满足安全和标准规范的约定, 又可满足服务路由和数据权限等信息管理的要求。
数据存储采用ORM (Object Relational Mapping, 对象关系映射)关系型数据库实现结构化数据存储, 采用HDFS(Hadoop Distributed File System分布式文件系统)分布式文件系统为非结构化数据存储提供了高效的解决方案。
数据服务基于统一、标准、规范的交互接口, 提供多样性的服务形式和多种标准格式数据, 基于Socket的JSON(JavaScript Object Notation)格式, 基于HTTP(超文本传输协议)的RESTFUL(面向资源的设计风格)格式, 基于WebService(远程调用服务)的xml(eXtensible Markup Language)格式, 同时也提供原始数据服务。
2.2 服务(S)
服务层构建于数据层之上, 是整个系统体系架构的核心, 并提供大量公共服务和基于业务构件的服务, 提供服务的运行、管理环境, 最大限度提高业务开发效率, 降低工程实施、维护的成本和风险。服务层采用支撑体系结构的先进标准和规范, 以帮助建立高性能、高可靠性、高扩展性的应用系统, 满足客户快速发展的业务需求。
基础业务构件采用分布式服务架构[13], 基于微服务框架SpringCloud[14]设计, 实现模块化、高性能、可伸缩的分布式服务体系。
公共服务组件提供高效的系统中间件, 对数据、服务等进行有效的解耦。
服务层提供由同一用户管理+集中认证服务实现的统一用户管理体系, 支持单点登录业务整合, 有效解决“一次登录, 多处使用”。
2.3 应用(A)
业务应用层提供所有的信息应用和系统管理的业务逻辑, 分解业务请求, 通过支撑服务层进行数据处理, 并将返回信息组成所需的格式提供给客户端。与传统体系架构下的业务层不同, 面向服务架构的业务层基于服务构建, 从而可以使业务能够更快地组装, 达到服务的改变不会影响已经使用中的业务应用, 使形成的应用更加稳定。
应用层包含Web系统与应用软件, 设计基于Springboot微服务框架实现, 可集成多种组件, 无需依赖Servlet容器, 与分布式服务天然集成, 并可独立运行、部署。
2.4 展现(P)
展现层[15]设计为前后端分离架构[16], 基于HTML5、Javascript等前端技术实现, 自由集成多种流行的前端插件, 融合GIS(地理信息系统), 实现资源、数据的集中统一展示。
展现层设计支持多终端, 在PC(个人电脑)机、移动设备(Android系统、iOS系统)等终端进行信息显示与人机交互。
3 应用实践
根据业务分析与架构研究的成果, 研发科考作业协同管理平台。管理平台可根据海洋调查规范(GB12763.1-10 2007)中定义的科学调查航次、调查海域、调查站位、走航测线、调查测线等概念, 结合极地科考实际应用业务, 提供方便、可视化、可扩展的科考业务流程, 并在此过程中规范各类作业规范和作业流程, 统一整理并输出各类业务记录模板。
2019年10月15日—2020年4月23日, “雪龙2”号参与执行中国第36次南极考察任务, 并在南大洋宇航员海进行了为期约37天的科考调查作业。在此期间极地科考破冰船科考协同管理平台在协调作业管理中发挥了重要作用, 受到实验室管理人员(用户, 平台的操作管理人员)和科考队员(服务对象, 平台使用具体受益人员)的广泛好评, 并得到新闻媒体的关注[17]。
“雪龙2”号第36次南极科学考察中, 在船应用的科考协同管理平台为1.0版本。主界面为经典地图类网页排版, 主体为左右结构(图8a), 左侧区域较大, 为主要展示区域, 该区域主要展示海图地图、站位站点信息、冰图等信息。通过该区域右下角的“航迹查询”、“航行计划”、“冰区图层”、“台风预报”等快捷菜单, 可方便显示对应信息。同时还可以通过点击“地图”、“海图”、“卫星图”实现显示区域地图的便捷切换; 右侧区域较小, 主要为信息查看区域, 该区域顶部主要显示航行(图8b)、机舱、气象(图8c)、水文(图8d)等与科考调查相关的基础参数, 中部主要展示航次基本情况, 底部主要展示站位及站点编号等信息。
实验室管理人员可以分权限通过账号和密码登录进入平台后台, 对航次基本信息、站位站点信息、水深水文定位等输入参数的输入源选择等内容进行编辑处理。平台系统在船上局域网内运行, 接入局域网内任何一台电脑均可打开查看, 科考队员就近在实验室、居住舱室均可方便进入该平台, 进行作业站位信息、作业内容、作业时长、航行等待时长、水文基础信息等的查询和记录。
实验室管理人员通过固定格式的Excel表格, 将站位名、位置、站位作业内容、各项目进行时长等进行编辑, 导入系统平台后, 科考队员可在各终端便捷查看。若调查计划有调整, 如作业站点先后顺序发生变化, 管理人员可编辑页面进行各站点的上下移动调整; 科考队员通过主页右上角可以直观查询到距下一站点的距离、预计航行时间和到达时间, 以便合理安排作息时间和采样准备工作; 点开站位编号, 可以查询到该站点具体的调查作业项目, 以及每个项目的持续时间。
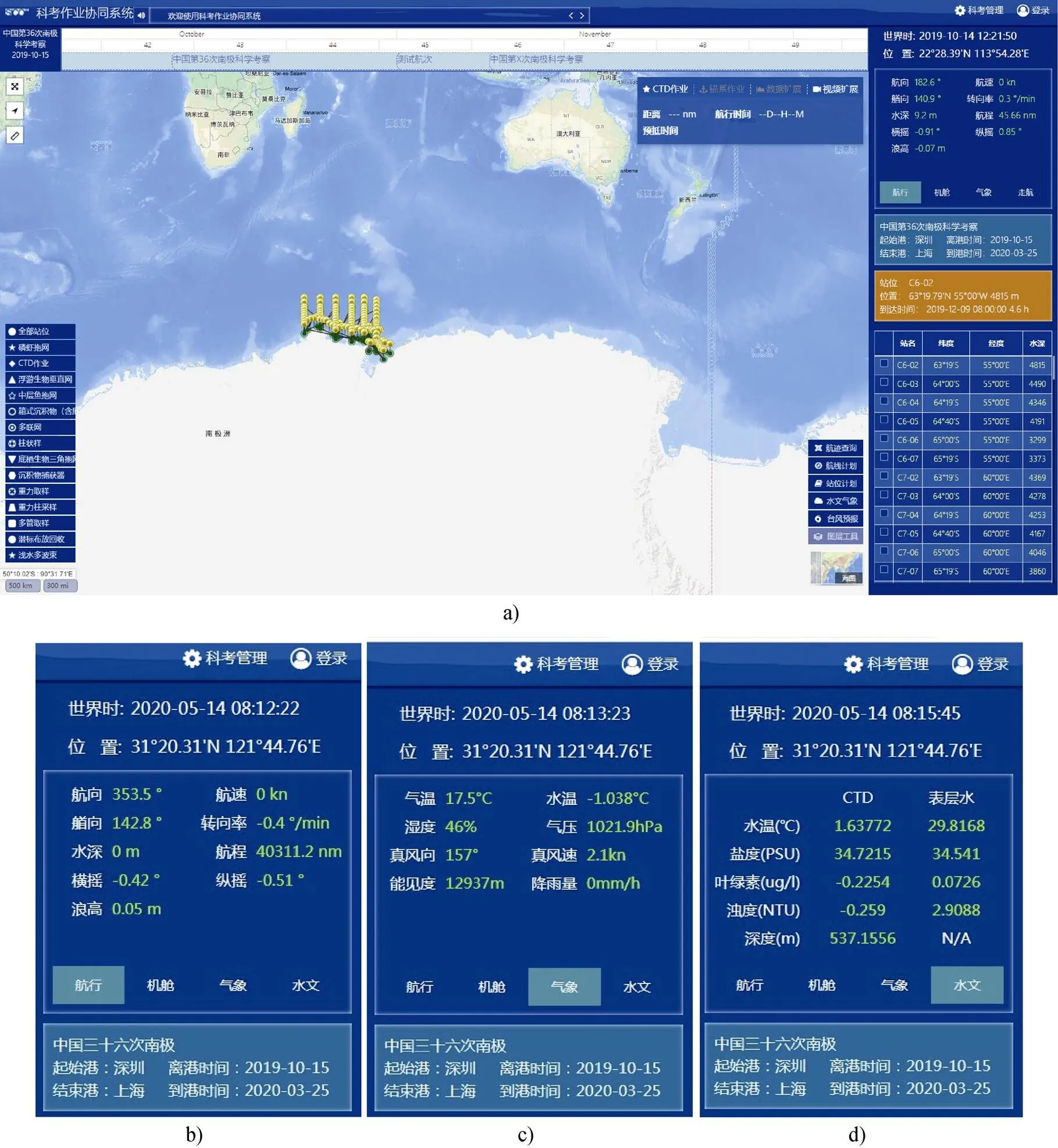
图8 协同管理平台主界面显示
Fig.8. Main interface display of collaborative management platform
除上述查询功能外, 平台还具有以往航迹线查询的功能, 科考队员可以对船舶经过的航线进行查看, 航迹线由航迹点组成, 每个点均包含: UTC时间、GPS位置、水深、海水温度、海水盐度等参数。这对进行一些走航测量的项目或错过某些站点信息记录的队员来说非常实用。同时系统平台具有台风实时查询更新系统, 可从NOAA官网定期抓取“雪龙2”号附近海域的气旋信息(图9), 确保航行和调查作业安全, 并为现场航行决策人员和首席科学家提供航线调整、调查作业计划调整的参考。此外, 平台还具备在原有海图或卫星底图上叠加最近日期冰情图的功能, 原有作业站点也将在冰图上得以显示, 首席科学家可以对原计划的调查作业站点是否受到海冰影响进行评估, 从而确定是否调整计划, 有效提高作业效率并节约船时。
通过一个南极航次的现场实际使用检验, 极地科考破冰船科考协同管理平台能较好地适应“雪龙2”号极地科考作业模式, 为首席科学家、科考作业队员、航行人员和实验室管理人员提供了一个实用平台, 能够有效提升科考作业效率并节约船时。同时, 系统对南大洋气旋频繁和海冰覆盖变化多端等特征也进行了针对性的设计, 可以将气旋和海冰等恶劣气象条件的影响降到最低。借助于平台, 软实力和硬实力相辅相成, 将“雪龙2”号配备的众多科考调查设备的调查作业性能发挥到一个新高度。
Fig.9. Typhoon forecast function
4 未来展望
在下一阶段的工作中, 通过现场的使用反馈, 管理平台将增加海域调查方案的制定、评审、修改方面的工作流程支持, 结合船舶定位、船舶姿态、海况冰区现报、冰区气象预报, 进一步增加海域调查方案预演功能, 支撑海域调查方案的制定与变更; 增加各学科工作量统计功能, 评估现场作业的工作时间与机动时间是否满足海域作业要求, 避免计划不足; 保障现场作业可以按照海域调查方案顺利完成。
管理平台将提供现场调查视频画面的扩展功能, 提供多设备数据融合、数据校正等数据业务, 保证数据成果物、图片、视频成果物的完整获取及数据质量。在高空、海面以上、海面、海面以下提供多种学科的现场作业模拟画面, 监视调查设备运行情况, 及时反馈设备异常情况与作业安全隐患等信息, 帮助各学科组长实时监控现场作业情况, 保障现场作业顺利、有效、安全进行。
后续管理平台更新版本中将考虑增加“雪龙”号科考调查作业的简洁信息, 不仅实现对“雪龙2”号本身的科考协同管理, 在极地科考船队管理中实现一定程度的协调作业、协同管理, 将“双龙探极”的优势在科考作业领域得到全面发挥。这不仅是单船科考作业模式的有效协同管理, 也将对我国科考船队的建设与发展产生影响。
5 结语
本文围绕管理平台的主要研究内容, 针对极地科考船在大洋和极区水域科考调查和科考作业的特点, 通过对中国极地研究中心“业务化调查”历史记录[4-9]的调查、归纳、总结与分析, 采用UML建模工具, 并以CTD作业这一典型的科考作业为例进行分析与研究。围绕“协同作业”这一核心需求提出极地科考船调查作业与管理信息化建设的业务架构与技术架构, 以此为基础设计并实现的“科考作业协同管理平台”现已实船应用。
管理平台将逐步应用于包括“雪龙”号在内的“雪龙”系列船, 随着科考业务研究的不断深入以及对于实际使用情况的反馈与搜集, 同时结合不同船舶的功能定位, 管理平台将持续扩充并完善业务分支与内容, 满足极地科考业务多船协作的复杂工作场景, 最终形成适用于极地中心科学调查的船(队)岸一体化管理平台。
1 张传波. 火球: UML大战需求分析[M]. 北京: 中国水利水电出版社, 2012: 1-22.
2 艾松涛, 鄂栋臣, 朱建钢, 等. 雪龙在线网络信息平台的研发与展望[J]. 极地研究, 2011, 23(1): 56-61.
3 中国船级社. 智能船舶规范2020[EB/OL]. (2020-03-01)[2020-06-10]. https://www.ccs.org.cn/ccswz/articleDetail?id= 201900001000009739.
4 余兴光. 中国第四次北极科学考察报告[M]. 北京: 海洋出版社, 2011: 210-216.
5 国家海洋局极地考察办公室. 中国第八次北极科学考察现场实施方案[R]. 上海: 中国极地研究中心, 2017: 7-9.
6 国家海洋局极地考察办公室. 中国第七次北极科学考察现场实施方案[R]. 上海: 中国极地研究中心, 2016: 13-19.
7 国家海洋局极地考察办公室. 中国第六次北极科学考察现场实施计划[R]. 上海: 中国极地研究中心, 2014: 44-60.
8 中国第34次南极考察队. 中国第34次南极考察现场执行报告[R]. 上海: 中国极地研究中心, 2018: 32-43.
9 张海生. 中国第三次北极科学考察报告[M]. 北京: 海洋出版社, 2009: 31-40.
10 中国大洋资料中心, 国家海洋信息中心. 中国大洋资料中心标准规范汇编[G]. 北京: 中国大洋矿产资源研究开发协会, 2017: 34-55.
11 陈华锋. 海洋科学考察可视化航次设计研究及应用[D]. 杭州: 浙江大学, 2009: 16-51.
12 张春霞, 李旭东, 徐涛. 浅谈面向服务架构(SOA)的核心理念[J]. 计算机系统应用, 2010, 19(6): 251-256.
13 李艳鹏, 杨彪. 分布式服务架构[M]. 北京: 电子工业出版社, 2017: 8-52.
14 郑天民. 微服务设计原理与架构[M]. 北京: 人民邮电出版社, 2019: 149-193.
15 黄坤, 石朝明, 董晓明, 等. 面向服务的舰艇作战系统集成框架研究与原理验证[J]. 中国舰船研究, 2013, 8(5): 1-5.
16 周俊鹏. 前端工程化: 体系设计与实践[M]. 北京: 电子工业出版社, 2018: 12-42.
17 乔亚美.“雪龙2”号科考队员昼夜颠倒风雪无阻[OL]. (2019-12-25)[2020-07-10]. http://m.news.cctv.com/2019/12/25/ARTIRhg 7JtNNeTCCdad2EBXH191225.shtml.
Design and implementation of science coordination management platform for
Wang Shuoren1, Chen Qingman1, Yu Huabing2, Zhang Yongzheng2, Song Dongfang2
(1Polar Research Institute of China, Shanghai 200136, China;2Landsea Maritech Co., Ltd, Dalian 116085, China)
Guided by the requirements of the national polar strategy, we developed a science coordination management platform for the research icebreakerto meet the requirements of navigation and scientific research. Our objective is to improve coordination of scientific research, and augment the polar research capabilities of our country. We sorted, summarized and analyzed historical documents from the Polar Research Institute of China. To improve the core factors of management and business processes, we analyzed cruise implementation and management activities. Combining UML(Unified Modeling Language) modeling tools with a complete investigation, this article proposes a scientific research business architecture design to address the core requirements of cooperative operation, and proposes the technical architecture of the platform, laying strong foundations for full process management of scientific research.
research icebreaker, scientific research business architecture, scientific cooperative operation
2020年3月收到来稿, 2020年7月收到修改稿
上海市科学技术委员会科研计划项目(18DZ1206103)资助
王硕仁, 男, 1972年生。高级工程师, 主要从事电气自动化、海洋科考仪器设备研究。E-mail: wangshuoren@pric.org.cn
陈清满, E-mail: chenqingman@pric.org.cn
10. 13679/j.jdyj.20200027
