基于LSTM和CNN的高速柱塞泵故障诊断
2021-03-27魏晓良潮群陶建峰刘成良王立尧
魏晓良,潮群,陶建峰,刘成良,王立尧
上海交通大学 机械系统与振动国家重点实验室,上海 200240
航空液压泵是飞机的重要零部件,同时高速轴向柱塞泵满足了航空领域对零部件体积小、功率密度高的要求而被广泛采用。但是轴向柱塞泵在高速工况下运转时,容易发生空化问题[1]。
空化是流体机械的常见故障之一,在泵类部件中更常见。空化是指油液局部压力低于其饱和蒸气压时,溶解于油液中的空气大量析出形成气泡或者空穴的现象。研究表明,柱塞泵的转速、入口压力、出口压力、配流盘的结构等外部内部因素均会对泵的空化现象产生影响[2]。气泡的产生和溃灭会产生剧烈的振动和噪声,同时对泵的零部件造成冲击、形成汽蚀破坏。其次空化的发生会降低泵的流量和容积效率,影响相关液压系统的正常工作,甚至导致严重的事故。因此,需要对高速轴向柱塞泵的空化故障进行有效的诊断,从而对泵的运行情况进行调整,避免空化现象的持续[3-4]。
故障诊断的思路是通过监测某种信号在正常和故障情况下的特征变化从而对故障进行识别。空化现象会造成泵的异常振动,并且振动的剧烈程度以及隐藏特征和空化现象的严重等级具有相关性,因此可以通过分析柱塞泵的振动信号从而对空化故障进行诊断[5]。在旋转机械故障诊断领域,不少研究者通过提取信号特征并结合机器学习习的方法建立了故障诊断模型,并取得了良好的效果[6]。
Mckee等[7]通过在离心泵轴轴承、入口法兰和出口法兰安装的振动加速度传感器采集泵的故障信号,并对信号进行倍频程频谱分析提取隐藏特征。最后利用主成分分析的方法找出对空化现象敏感的特征,并建立了一个空化故障敏感因子对空化严重程度进行评价。在特征提取方面,经验模态分解是一种有效的特征提取方法。在故障分类方面,研究人员利用各种有效的机器学习方法提高了故障诊断的准确率。Azizi等[8]对振动信号进行经验模态分解(Empirical Mode Decomposition,EMD)得到本征模函数(Intrinsic Mode Function, IMF)分量作为特征,同时利用蜂群算法优化特征的选择,最后搭建了回归神经网络故障分类器。Shervani-Tabar等[9]。利用了经验模态分解和希尔伯特黄变换(Hilbert-Huang transform, HHT)的方法提取振动信号特征,并结合支持向量机分类器实现对柱塞泵空化程度的诊断。为了进一步提高算法的性能,需要对算法的参数进行优化。Bordoloi和Tiwari[10]针对离心泵的堵塞和空化故障,利用振动信号的统计特征建立了故障分类器,使用网格搜索、遗传算法、人工蜂群算法搜索支持向量机分类器的最佳参数。可见,在泵的故障诊断领域,研究主要集中在故障特征的提取、故障诊断分类器的建立及优化两个方面[11-12],但故障特征提取依赖人工选择,耗时、需要专家经验的辅助,同时针对有噪声环境下的故障诊断需要附加额外的信号处理方法,存在一定的不足和改善空间。
近年来,深度学习技术迅速发展,并因其强大的特征提取和学习能力在语音识别[13]和计算机视觉[14]领域广泛应用。深度学习能实现自动特征提取,并通过多层次的非线性映射关系能学习深层次的故障特征[15],适用于复杂数据下的故障诊断。卷积神经网络(Convolutional Neural Networks, CNN)是典型的深度神经网络之一,工作原理是对数据进行多层卷积、池化等操作,逐步提取从浅层到抽象的特征。同时其独特的网络结构能有效减少参数数量、降低模型的复杂度,便于模型的训练和应用。Zhang等[16]利用一维卷积神经网络建立轴承故障诊断模型,该模型能够适应不同工况和环境噪声。针对不平衡训练集带来的故障特征学习不充分、诊断可靠度下降的问题,Jia等[17]提出了深度归一化卷积神经网络。同时利用神经元最大激活算法研究了卷积核学习到的特征,对深入理解卷积神经网络提供了帮助。为了拓展特征学习的范围,二维卷积神经网络也被用于故障诊断。Wen等[18]把轴承一维振动信号转化为二维灰度图,利用二维卷积神经网络学习灰度图中隐含的特征,从而实现轴承故障类型的诊断。Xu等[19]对采集到的信号进行时频分析得到信号的时频图,利用二维卷积神经网络对时频图像进行处理,自动学习时频图的特征并实现振动事件的分类。
卷积神经网络能够有效抽取高维数据的隐藏特征,然而循环网络(Recurrent Neural Network, RNN)可以学习到历史信息,研究表明循环网络更适合处理时间序列。作为RNN的变体,长短时记忆(Long Short-Term Memory, LSTM)网络弥补了普通循环网络带来梯度消失、梯度爆炸从而难以训练网络的问题,更好地适应时间序列信息的处理[20]。LSTM在语音识别、文本识别等方面有成功的应用,同时也被用于故障诊断领域提取故障信号时间序列的特征。王鑫等[21]利用LSTM网络实现了对民航飞机故障历史数据的预测,并且对模型参数进行了优化。于洋等[22]构建LSTM模型并结合迁移学习技术,实现对轴承不同故障的声发射信号的识别。容易想到,结合卷积神经网络和LSTM网络可以发挥两者的优势。Sainath等[23]利用了CNN、LSTM和深度神经网络(Deep Neural Networks, DNN)的互补性建立了一个统一的体系结构,其模型性能在语音辨识任务上超过三个单一模型中性能最强的LSTM模型。Ordóez和Roggen[24]建立了基于CNN和LSTM的模型并利用多模态可穿戴设备实现对人体活动的识别。可见结合CNN和LSTM的模型对时间序列问题的处理在特定情况下更具优势。
针对轴向柱塞泵空化故障诊断依赖人工提取特征、模型诊断抗噪性能弱的问题,本文在前人研究的基础上,提出一种基于CNN提取特征并结合LSTM学习时序信息的空化故障诊断方法,同时提出的模型具有良好的抗噪性能。高速轴向柱塞泵的空化故障诊断方法研究主要分为三个部分:信号采集、模型建立和训练、结果分析。
1 实验方案和信号采集
为了监测高速轴向柱塞泵的空化现象,搭建了柱塞泵空化故障实验台,如图1所示。U表示传感器输出电压信号,其他符号代表传感器的所测的物理量:p为压力;Q为流量;T为温度;n为转速;θ为温度。
增压油箱向柱塞泵供液压油,油液温度保持在90 ℃左右,避免油温波动对空化发生的影响。电机通过联轴器带动被测试泵运转,进口调压阀组可调节泵的进口压力,从而模拟在不同进口压力下的发生空化的现象。溢流阀调节泵的出口压力,从而设置泵在指定的工况下运行。在出口管路和回油管路分别装有一个流量计,用于检测泵的出口流量和回油流量。转速扭矩仪用于测量泵的转速和输入扭矩。被测泵的主要性能参数如表1所示。
利用柱塞泵壳体的振动信号作为空化故障诊断模型的输入,需要在柱塞泵的壳体上安装振动加速度传感器,用于采集柱塞泵发生空化时的3个方向振动信号,从而间接反映泵的空化程度。振动传感器的安装位置如图2所示,图中标识X、Y方向,垂直纸面向外Z方向分别是传感器的3个通道方向。在空化故障实验过程中,被测泵在额定转速10 000 r/min,额定出口压力21 MPa的工况下运行,通过进口调压阀组调节泵的进口压力,使得泵的进口压力从额定值开始逐渐降低。随着进口压力的降低,泵将会发生不同程度的空化。
后续的故障诊断模型训练需要得到输入信号的标签,因此需要对空化现象的严重程度进行划分。由于被测泵壳体由不透明的铝合金制造而成,无法直接观察内部的油液是否发生空化以及判断空化的程度。鉴于泵发生空化时会导致出口流量下降、容积效率降低,且容积效率下降程度和空化程度呈线性正相关关系,因此可通过泵的容积损失的大小来定义泵的空化程度大小。定义一个无量纲参数容积损失率作为空化等级的评价标准:

图1 高速轴向柱塞泵实验台原理图Fig.1 Schematic diagram of high-speed axial piston pump test bench

表1 被测泵的主要参数Table 1 Main parameters of tested pump
(1)
式中:V为泵的排量;qt为理论进口流量;qin为实际进口流量;qo为实际出口流量;qr为回油流量。
在忽略泵的死腔容积情况下,泵的进口流量等于泵的实际出口流量和回油流量之和。容积效率损失越大代表着空化程度越严重,如表2所示,根据容积损失率的大小把空化严重程度分为4个等级:无空化(Δηv=1.0%);轻微空化(Δηv=2.0%);中等空化(Δηv=8.0%);严重空化(Δηv=76.0%)。可知,柱塞泵在进口压力低于额定值时就开始发生空化,且进口压力越低空化现象越严重。在0.25 MPa时,泵没有发生空化,但是由于式(1)忽略了泵的死腔容积,计算得到的容积损失率会略大于0。
根据上述讨论,通过柱塞泵空化故障实验台采集4种不同进口压力下发生的不同程度空化现象的壳体振动信号,采集频率是10 240 Hz,每类
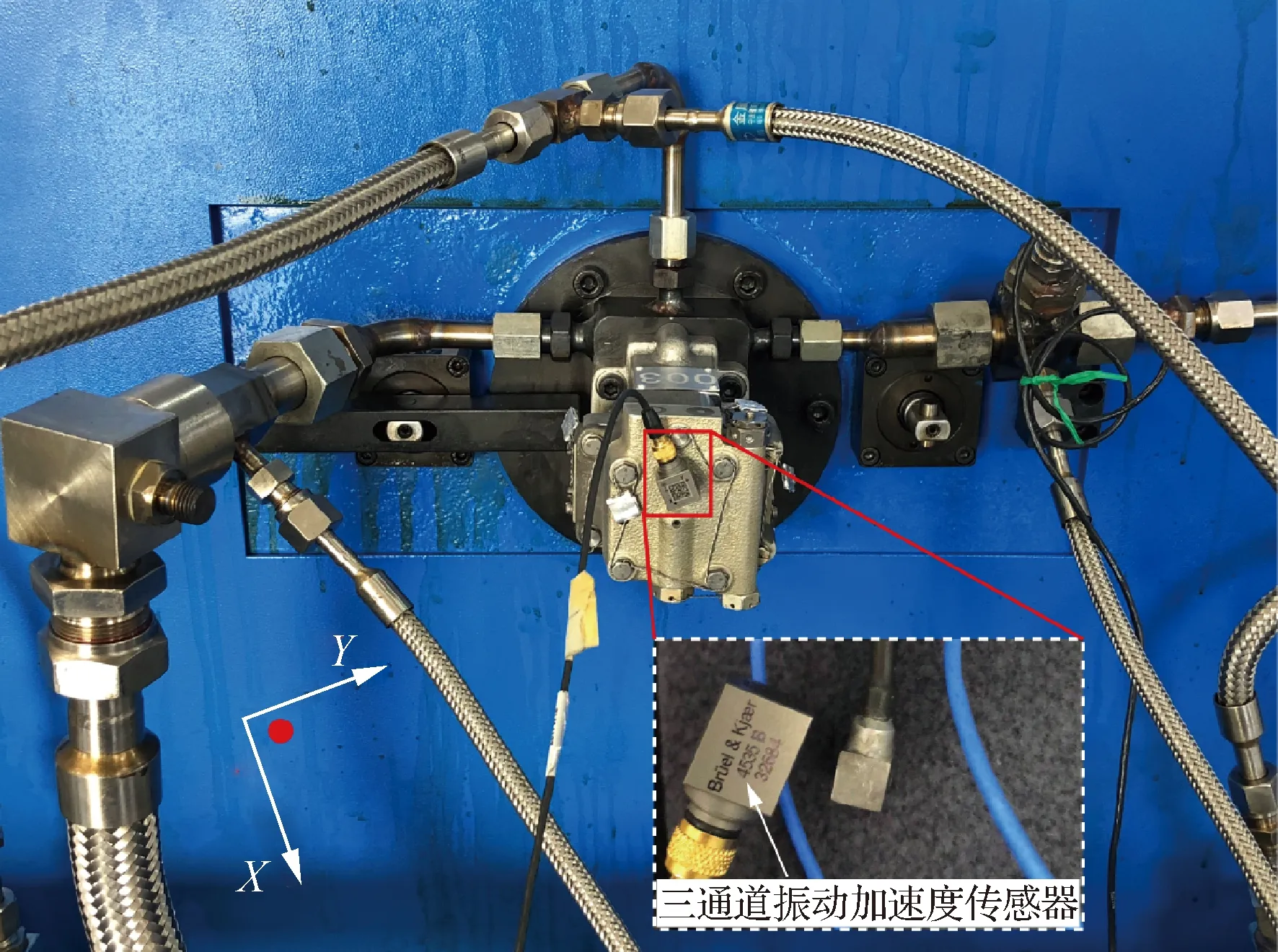
图2 振动加速度传感器安装位置Fig.2 Installation location of vibration acceleration sensor

表2 不同进口压力下被测泵的空化等级
样本长度是61 440个。图3所示是不同空化程度下壳体的X轴振动信号,保存实验采集到的振动信号,用于后续模型的训练和测试。
从图3可看出,发生不同空化程度的振动信号存在差异,如信号的最大值、最小值、峰-峰值等。一个明显的现象是,随着空化程度的加剧,柱塞泵壳体振动信号的幅值增大。为了更快、更准确诊断出故障,需要在足够短的信号中发现故障特征,但利用局部信号的时域特征难以对不同的故障程度进行准确地区分,并且时域特征容易被噪声干扰。因此,利用本文提出的CNN和LSTM相结合的模型对信号进行空化程度的故障诊断。
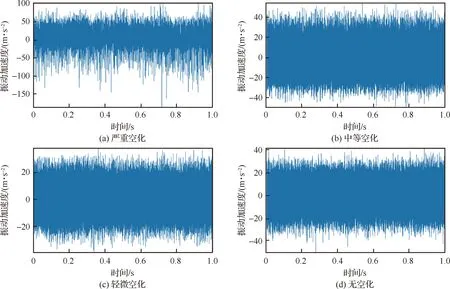
图3 不同空化等级的泵壳体振动信号Fig.3 Vibration signals of pump casings at different cavitation levels
2 基于CNN和LSTM的诊断模型
2.1 卷积神经网络(CNN)
设计一维卷积神经网络包括噪声层、卷积层、批标准化层、最大池化层、随机丢弃层,构成以卷积运算为核心的特征提取模块。
卷积层的主要功能是对数据的局部区域和卷积核进行卷积运算后输出,通过设置移动步长让单个卷积核感受野遍历整个输入数据。卷积层的运算:
(2)
(3)
在卷积神经网络的训练过程中,前面层的参数变化会导致后续层的输入分布的变化,导致模型训练变得困难。为了加速模型的训练,引入批标准化层来对数据进行归一化操作,同时还会带来一定的正则化效果。批标准化的数学公式为
(4)
(5)
为了保证能够提取足够的隐藏特征,卷积层的输出维度一般比较大,因此容易带来过拟合的问题。引入池化层实现对输入特征的降采样,同时保留突出的特征,能够减少模型参数同时抑制过拟合。一般采用平均池化或最大池化,采用最大池化:
(6)
搭建的卷积神经网络用于提取振动信号的特征,在现实工况下,采集到的振动信不可避免带有噪声。为了提高模型的鲁棒性,可在卷积神经网络引入随机丢弃机制,让神经元之间权重随机置零,随机丢弃机制过程为
(7)
(8)

在模型最后的分类模块采用全连接层和分类器,把前面网络提取的特征进行非线性激活输出各个分类的概率分布。采用Softmax评估函数作为模型最后的输出:
(9)
式中:yj为输出层第j个神经元输出;m为空化故障程度的类别数量;p(yj)为神经元经过Softmax的概率输出。
为了提高模型的抗噪能力,本文提出的模型中引入了噪声层。噪声层的作用是在训练数据中添加噪声信号,让模型训练的过程中“见到”噪声,从而提高测试过程中模型诊断的准确率。
2.2 长短时记忆(LSTM)网络
标准的循环神经网络,每个时刻的隐藏层状态由当前输入和前隐藏层的状态同时决定,记忆容量有限而且容易造成梯度消失的问题。LSTM网络在RNN的基础上进行改进,主要特征是包含遗忘门、输入门和输出门,如图4所示。图4中的σ表示sigmoid激活函数,输出范围是0~1,tanh用于调节数值大小的函数,输出范围是-1到1之间,图中其余变量含义见下文公式说明。
遗忘门用于控制先前时刻的状态如何保留到当前单元状态中,实现对记忆内容的筛选,遗忘门的输出为
ft=σ(Wxfxt+Whfht-1+bf)
(10)
式中:Wxf为输入和遗忘门之间权重矩阵;Whf为历史输出和遗忘门之间权重矩阵;bf为遗忘门偏置项;xt为当前输入状态;ht-1为前一时刻输出状态;ft为遗忘门输出。
输入门用来更新单元状态,将先前时刻状态和当前输入信息输入sigmoid激活函数,得到0~1之间的输出值来决定信息的更新,0表示不重要,1表示重要。同时先前时刻状态和输入信息输入tanh函数得到-1到1之间的压缩表示得到候选单元状态。输入门输出和候选单元状态为
it=σ(Wxixt+Whiht-1+bi)
(11)
(12)

在获得遗忘门的输出以及输入门输出之后,可得知当前的单元状态Ct有两部分相加得到,一部分是由遗忘门输出和前一时刻单元状态相乘决定的信息保留,另一部分是由输入门和当前候选状态相乘决定的信息添加。单元状态为
(13)
输出门用于控制单元状态的最终输出,单元输出由输出门输出和当前单元状态信息相乘并经过tanh激活函数得到。输出门和单元输出为
ot=σ(Wxoxt+Whoht-1+bo)
(14)
ht=ottanh(Ct)
(15)
式中:Wxo为输入和输出门之间权重矩阵;Who为历史输出和输出门之间权重矩阵;bo为输出门偏置项;ot为输出门输出;ht为单元输出。
2.3 空化故障诊断模型
在分析卷积神经网络和长短时记忆网络原理之后,提出基于CNN和LSTM故障诊断网络。输入信号是不同空化程度等级下采集的振动信号切片,输出是空化等级的预测值。网络结构如图5所示,主要架构是CNN和LSTM,同时包括噪声层、池化层、批归一化层和全连接层。模型结构中的Dropout的作用是按照一定的比例随机将神经元权重置0,该比例设置为0.25,Reshape层的作用是重组数据,使其满足后续网络层的输入结构要求,其他层具体的参数设置如表3所示。空化故障诊断问题是一个多分类问题,损失函数采用多分类交叉熵损失函数,定义为
(16)
式中:N为数据样本数;M为故障类别数量;yic为指示变量,预测类别与样本类别相同取1,反之是0;pic为样本预测类别的概率,由Softmax层输出。
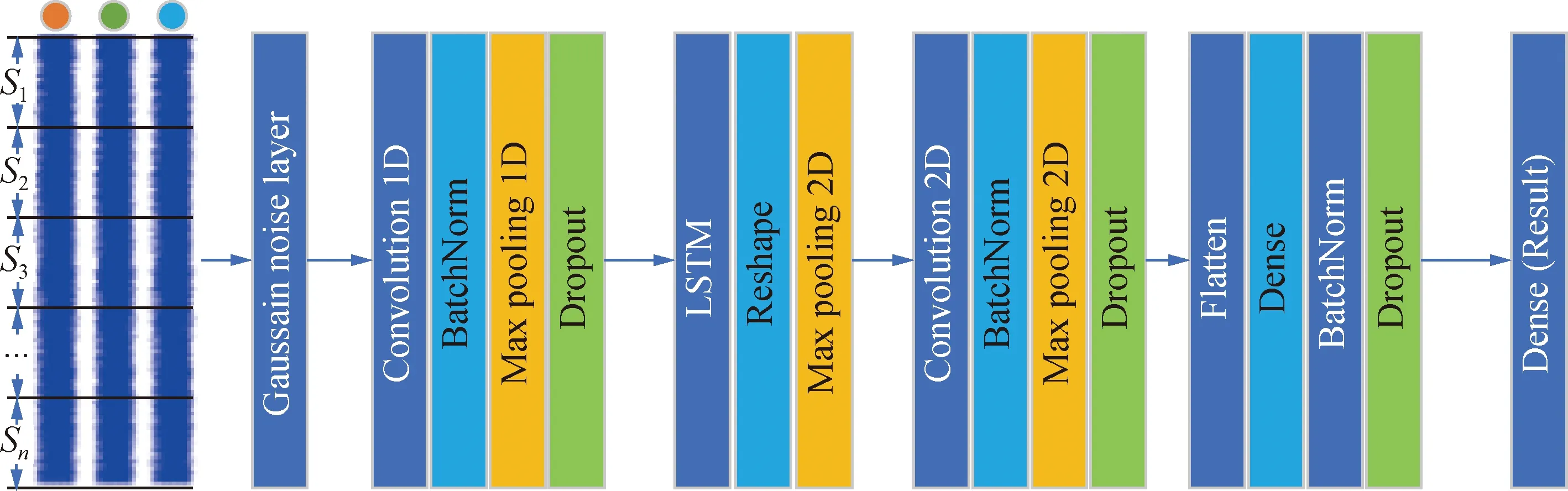
图5 模型结构Fig.5 Model structure
3 实验结果与分析
3.1 故障诊断流程
根据本文第1节描述进行实验,采集4种不同空化程度的振动信号,然后按照如下步骤进行数据处理和模型训练,数据集如表4所示。
1) 信号切片,切片的原则是保留至少一个转动周期的振动信息,每段信号的点数为
(17)
式中:K为每段切片信号包含的点数;k为正整数,表示选择转动k圈的信号;n为泵的转速,单位r/min;f为采样频率,单位Hz。
2) 划分数据集,把振动信号片段按照4∶1的比例划分为训练集和测试集,同时保证不同类别的数量均等,划分情况如表4所示。将训练集数据缩放成均值为0,方差为1的分布,避免模型对信号幅值的依赖。同时假设测试集和训练集符合同一分布,测试集的缩放按照训练集的参数进行:

表4 数据集划分Table 4 Data set division
(18)
(19)

3) 建立模型,按照第2节描述的参数建立模型并训练。
4) 构造不同信噪比的测试集,并用于模型测试。构造的方法是将原始测试集信号和高斯白噪声信号进行叠加后并根据训练集参数进行缩放,信噪比的范围是-2~10 dB。信噪比定义为
(20)
式中:PS为信号功率;PN为噪声功率。
3.2 不同通道振动信号对诊断结果的影响
空化现象导致的冲击在壳体上的引起的振动在3个方向上不是均等的,在不同的方向蕴含的故障特征会影响诊断的效果。在分析实验采集柱塞泵壳体上三个通道的振动信号对诊断结果的影响时,让模型的噪声层不工作,并且在无噪声测试集下进行测试,结果如表5所示。
结果表明,CNN+LSTM组成的故障诊断网络能够有效对4种不同的空化程度进行准确的诊断,准确率高并且损失函数值小。同时结果表明,在无噪声情况下,利用三通道信号进行故障诊断在损失函数值上比单通道信号有优势,说明同时学习三通道的信号特征有助于提高模型的性能。
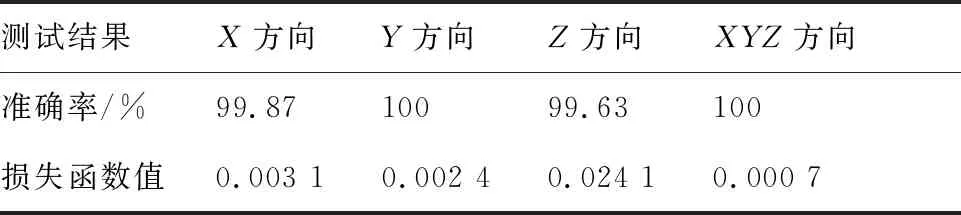
表5 不同通道振动信号测试集性能比较
进一步对比利用不同通道振动信号对在噪声环境下诊断准确率的影响,结果如图6所示。可知,在信噪比小于等于2 dB时,不论是使用单通道和三通道振动信号,模型诊断准确率均低于50%,不能满足故障诊断的要求。信噪比在4~10 dB时,使用三通道振动信号的性能明显高于使用单一振动信号。同时结果表明,相同的模型利用不同通道振动信号对模型准确率有明显的影响,尤其在信噪比0~8 dB 范围内差异显著,利用X轴振动信号的准确率最高,Y轴和Z轴之间没有明显优劣区分,但均次于X轴。为了提高模型的鲁棒性,需要充分利用3个通道的振动信号,同时为提高在低信噪比情况下的模型诊断准确率,进一步引入噪声层。
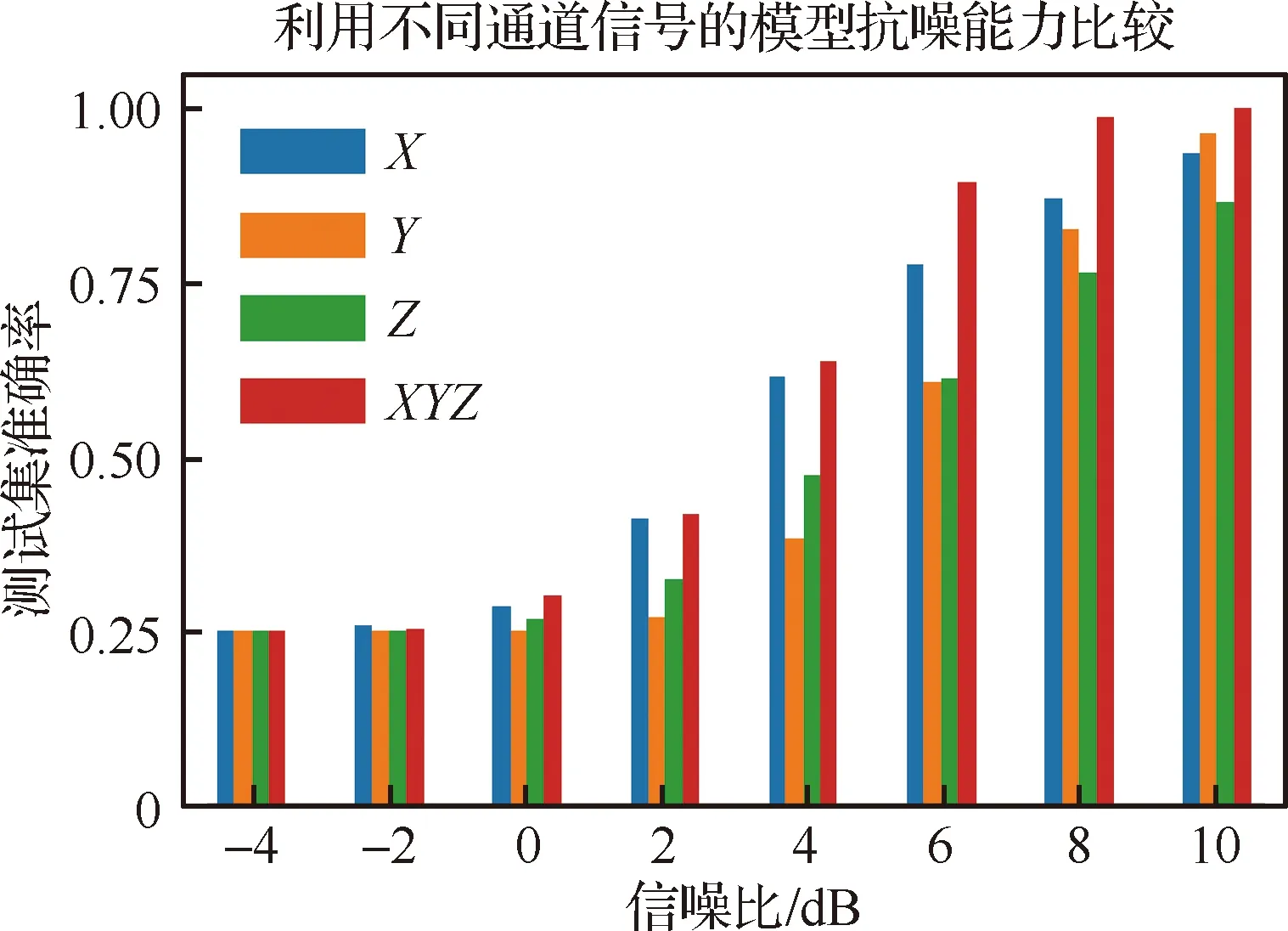
图6 利用不同通道信号的模型抗噪能力比较Fig.6 Comparison of anti-noise capability of models using signals from different channels
3.3 混合网络和纯CNN效果对比
在利用三通道振动信号的基础上,进一步引入噪声层,噪声层的设置参照第2节。输入信号首先经过噪声层,噪声层给信号添加随机噪声再传给后续的网络进行训练,该过程可以让模型“见到”噪声。随着训练的进行,模型会逐步提高对噪声信号的识别能力,并在噪声环境下抽取有用的特征进行最后的故障诊断。为了更好地说明CNN-LSTM联合网络的优越性,将2.3节所提的网络结构中的LSTM层更换为普通的CNN层,对比两种模型的抗噪性能,结果如图7所示。
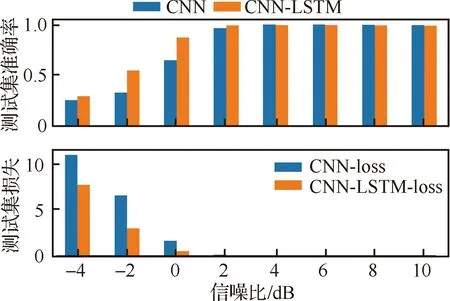
图7 CNN, CNN和LSTM结合模型性能比较Fig.7 Performance comparison between CNN model and CNN and LSTM combined model
结果表明,CNN和LSTM结合的网络在强噪声环境的准确率明显高于CNN网络。在0 dB时CNN和LSTM结合网络的准确率仍然高达87.3%,并且在测试集上测试的损失函数值也明显低于CNN模型,说明本文所提出的模型在噪声环境的诊断准确率高且可靠性强。
噪声层引入的噪声是高斯噪声,噪声的大小可以通过设置方差的大小进行控制。在训练过程中若引入噪声太大,会覆盖原信号的特征,导致模型在诊断高信噪比信号时的性能下降,引入的噪声太小则不利于提高模型的抗噪性能。从图8可知,随着噪声层方差的增大,会提高强噪声环境下的故障诊断准确率,但同时会降低弱噪声环境下的性能。在故障诊断过程中,模型设计需要平衡强噪声环境和较弱噪声环境下的性能。综合考虑,方差设置为0.8综合性能最好。
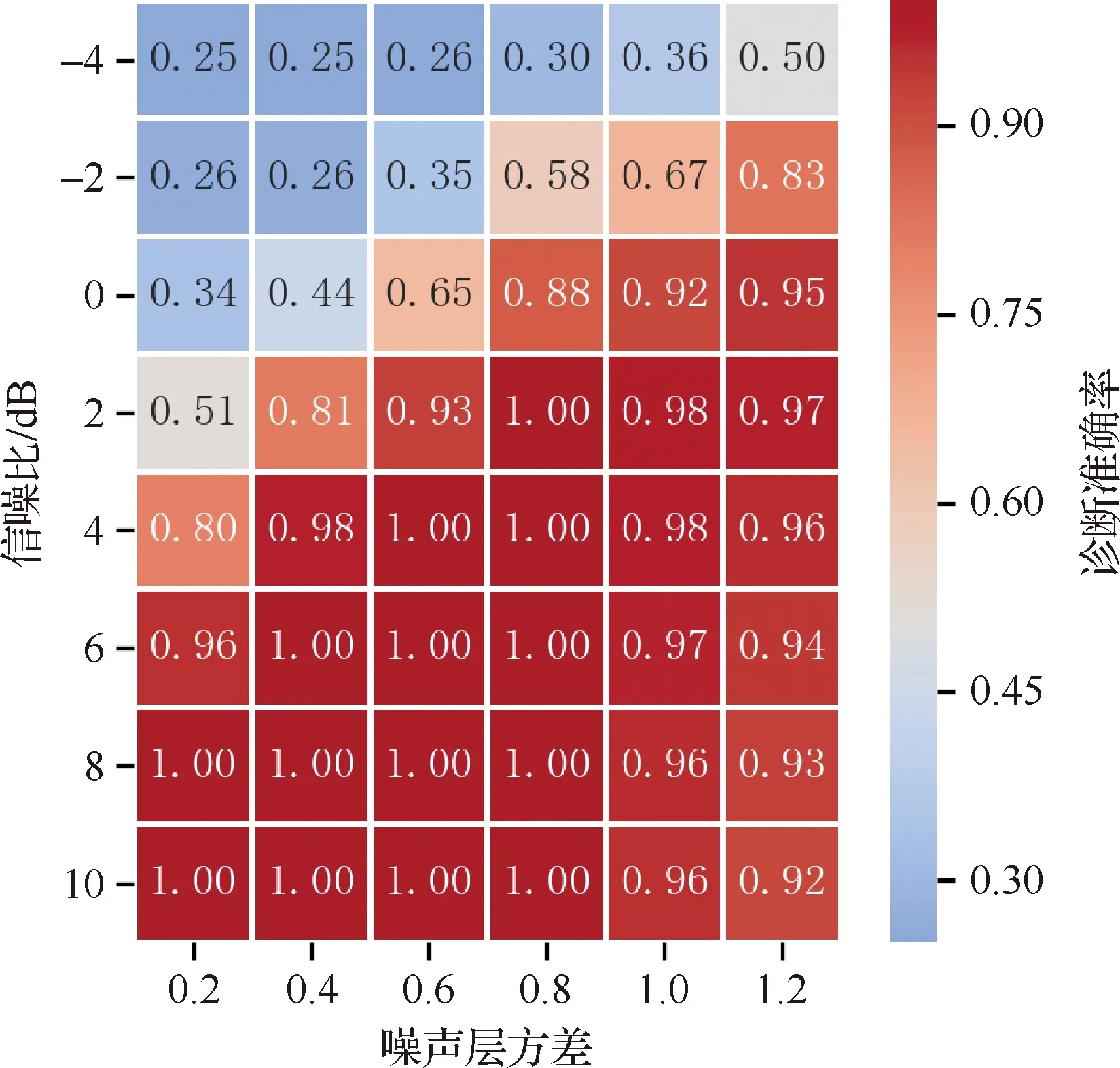
图8 噪声层方差对模型抗噪能力的影响Fig.8 Effect of noise layer variance on anti-noise ability of model
为了更好评估模型的诊断效果,给出噪声层方差设置为0.8时,无噪声测试集和6 dB信噪比测试集的故障诊断混淆矩阵,分别如图9和图10所示。可知,模型在无噪声和有噪声情况下的不同程度故障诊断准确率均比较高,在有噪声环境下,没有出现严重空化识别为无空化现象的严重错误。
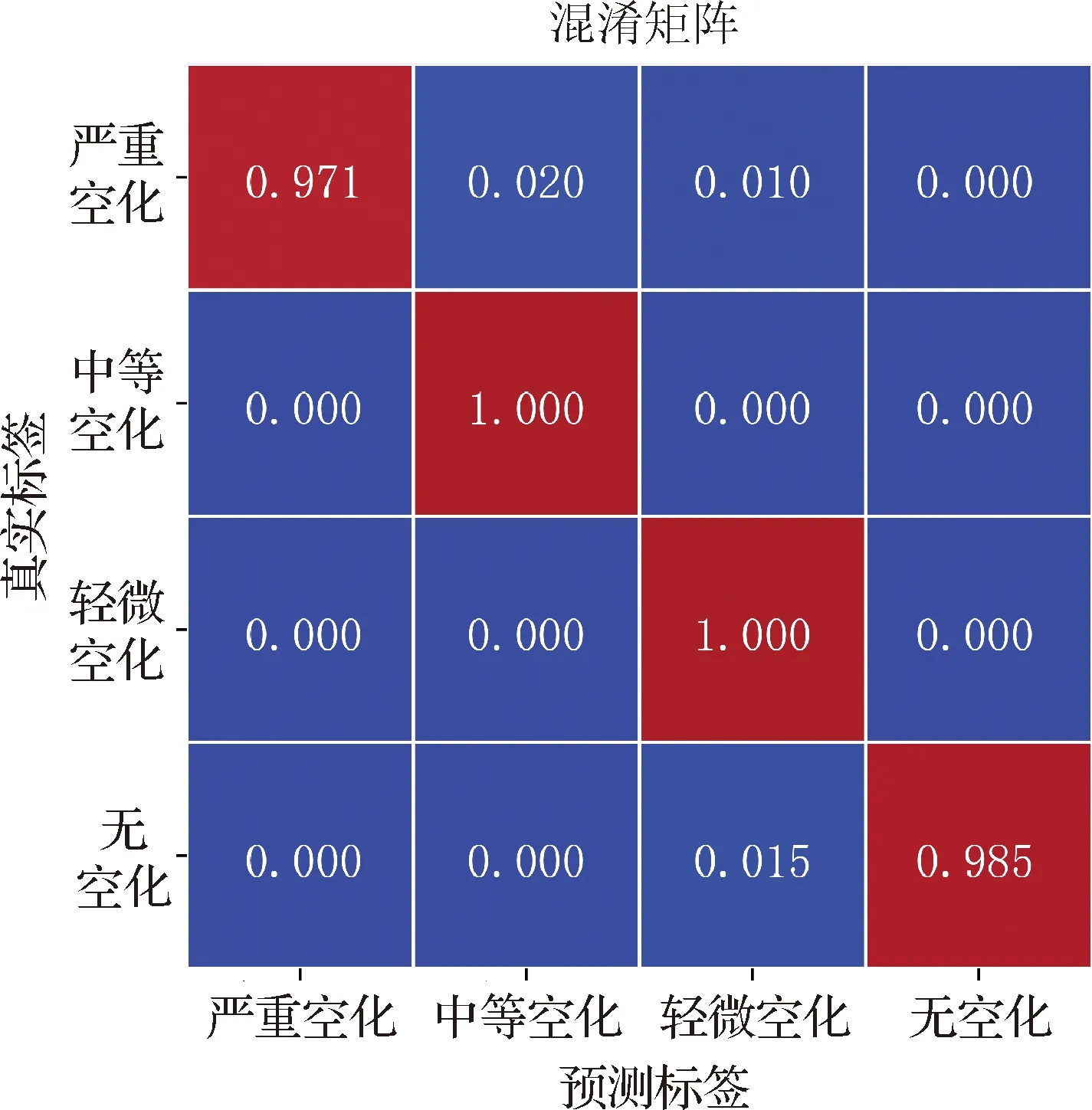
图10 信噪比6 dB下模型诊断结果混淆矩阵Fig.10 Confusion matrix of model diagnosis results with 6 dB SNR
3.4 模型可视化
所提模型的诊断效果在实验数据上得到了初步验证,但学习过程难以表达。为直观理解CNN+LSTM模型对振动信号特征的学习过程,采用T-SNE(T-Stochastic Neighbor Embedding) 降维的方法可视化表达各个层的输出结果。图11显示了656个信噪比为2 dB的样本输入模型后,模型中的卷积层、LSTM层、最后两个全连接层的输出经过T-SNE处理后的流形图。分图题对应表3中的网络层,图中两个坐标轴特征1和特征2没实际意义,指代T-SNE降维后的两个特征。从图可知,从原始信号难以区分不同的空化程度。随着网络层对特征提取,模型逐步学习出不同空化程度的故障特征,这些特征呈现出独特的流形分布。样本数据流经模型不同的层后,类间距变大,类内间距缩小,最后实现准确可靠的分类。
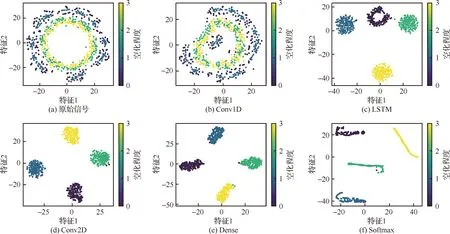
图11 2 dB信号输入模型后的TSNE降维可视化情况Fig.11 Visualization of TSNE dimensionality reduction after 2 dB signal input model
4 结 论
1) 提出了基于长短时记忆和卷积神经网络的高速轴向柱塞泵故障诊断方法。该方法避免了人为提取特征的耗时、对专家经验依赖性强的问题,可以实现对柱塞泵空化故障的有效诊断。同时诊断结果表明,所提方法能够准确诊断柱塞泵的不同空化程度,在无噪声情况下准确率最高高达99.5%
2) 所提方法通过利用LSTM网络对时序信息的提取能力和在模型中引入噪声层提高了模型的抗噪性能。试验表明,所提方法在信噪比0 dB的强噪声环境下故障诊断准确率保持在87.3%,并且明显高于纯CNN和LSTM网络的抗噪性能,表明所提方法的鲁棒性能好。