基于矩化GO法的某型电动飞机扰流板系统可靠性
2021-03-27李景奎汪英王博民
李景奎,汪英,王博民
沈阳航空航天大学 民用航空学院,沈阳 110136
新能源电动飞机[1]的成功研制,标志着中国航空器研发正在向低能耗、低污染方向发展。国外对电动飞机也展开了大量的研究[2-3]。扰流板系统[4-5]对于电动飞机的机动性能影响较大,其主要功能是协助飞机完成滚转动作,在飞机中断起飞或着陆过程中,扰流板作为减速板使用,可以增大飞机阻力并减少升力。所以扰流板系统可靠性对于电动飞机的安全性至关重要。
GO法[6](Goal-Oriented method)是一种有效的系统可靠性分析方法,尤其适用于有序列、多信号、多状态[7]的系统可靠性分析。GO法能够有效避免系统可靠性故障树分析中建模困难等问题,被广泛应用于系统可靠性研究[8-9]。马骏等[10]以GO法为基础分析飞机液压系统的可靠性。王海朋等[11]将GO法与模糊数学结合对导航系统进行可靠性分析。黄涛等[12]将GO法应用在压水堆净化系统,给出了常用6种操作符在SIMULINK的仿真模块。江秀红等[13]将状态概率矩阵应用到GO法当中,提高了GO运算的效率。张丽娜等[14]以模糊GO法分析飞机备件支援系统可靠度。李玉峰和宁昭义[15]将状态概率矩阵与SIMULINK仿真技术结合,研究了电动飞机电推进系统的可靠性,取得了良好的效果。
本文给出操作符11在SIMULINK中的运算模块,解决扰流板冗余系统的可靠度计算问题。同时,为了解决传统GO法在并联系统可靠性分析中存在的建模复杂等问题,提出一种矩化操作符,给出运算流程,可有效减少GO法在并联系统中建模的工作量,提高工作效率。最后,通过故障树分析法对计算结果进行了验证。
1 某型电动飞机扰流板系统建模
1.1 模型建立
某型电动飞机扰流板系统结构原理图如图1所示,其工作原理为:主驾驶和副驾驶分别为主输入端,驾驶员对副翼感觉/定中组件提供机械输入,组件驱动副翼PCU(动力控制组件),通过扰流板混合器和比率变换器带动钢索,向扰流板作动筒发出机械信号,使机翼两侧共8个扰流板工作(每个扰流板独立工作,且一侧有2个扰流板正常工作时可保证飞行安全)。操纵台上的副翼/方向舵配平面板和减速板手柄作为次输入,依次通过作动筒、传感器控制扰流板收放,以控制飞机中断起飞、空中翻滚及落地减速等工作。以上信号流最终输入至FDAU(飞行数据采集组件)。系统GO图如图2所示。

图1 扰流板系统原理图Fig.1 Structure diagram of spoiler system

图2 扰流板系统GO图Fig.2 GO diagram of spoiler system
1.2 定性GO分析
根据系统工作原理,主驾驶、副驾驶、副翼/方向舵配平面板和减速板手柄作为信号输入,均以操作符5模拟,副翼感觉/定中组件、扰流板混合器和比率变换器属于有信号导通元件,使用操作符6模拟。由于机翼两侧各有4个扰流板独立工作,且每4个扰流板中至少有2个扰流板正常工作及判定系统正常,故将每侧扰流板组后接操作符11模拟M取K门的情况。扰流板作动筒及副翼配平作动筒有提前状态(漏油值2)和故障状态(卡阻值3),以操作符3模拟,其余均为两状态单元。具体操作符信息见表1所示。其中,各个元件的状态值通过试验、数值计算获得。
通过MATLAB和SIMULINK搭建GO运算平台,已有常用操作符的SIMULINK计算模块详见文献[12]。本文给出操作符11(M取K门)的SIMULINK计算模块。
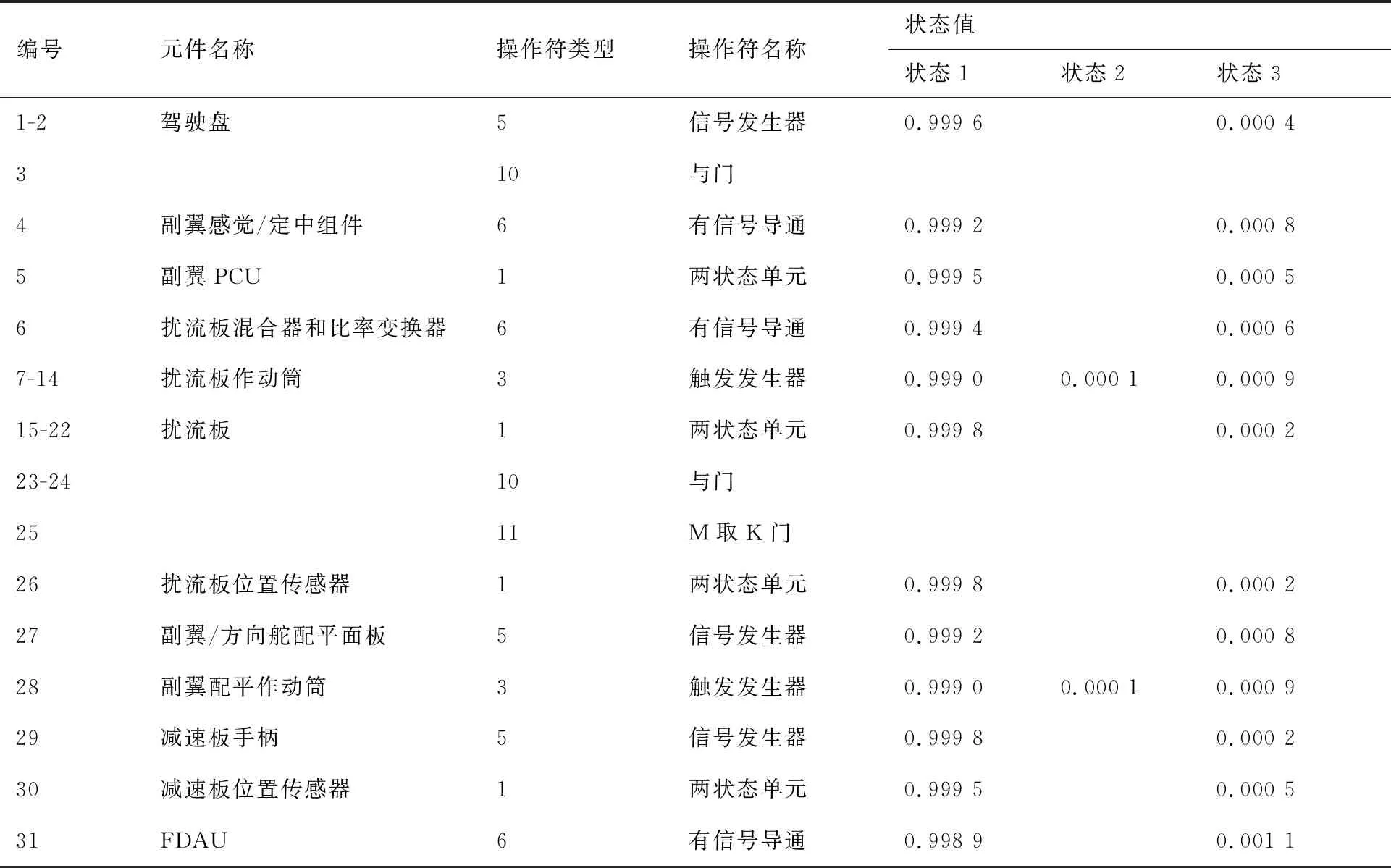
表1 功能操作符数据信息Table 1 Data information of functional operators
1.3 M取K门的模块结构
M取K门经常表示冗余系统,有M个输入信号,1个输出信号,表示输入和输出的逻辑关系。包含时序问题和两状态问题。在两状态问题中,M个输入中至少有K个成功,输出才成功。某型电动飞机扰流板系统中M取K门以两状态问题计算。扰流板系统要求机翼两侧各有4个扰流板,每个支路独立工作,单翼向4个扰流板保证有2个以上正常工作可使飞机保证正常工作状态。每个扰流板工作原理相同且正常状态概率相同,根据排列组合关系,可确定系统成功概率数学表达式如下:
(1)
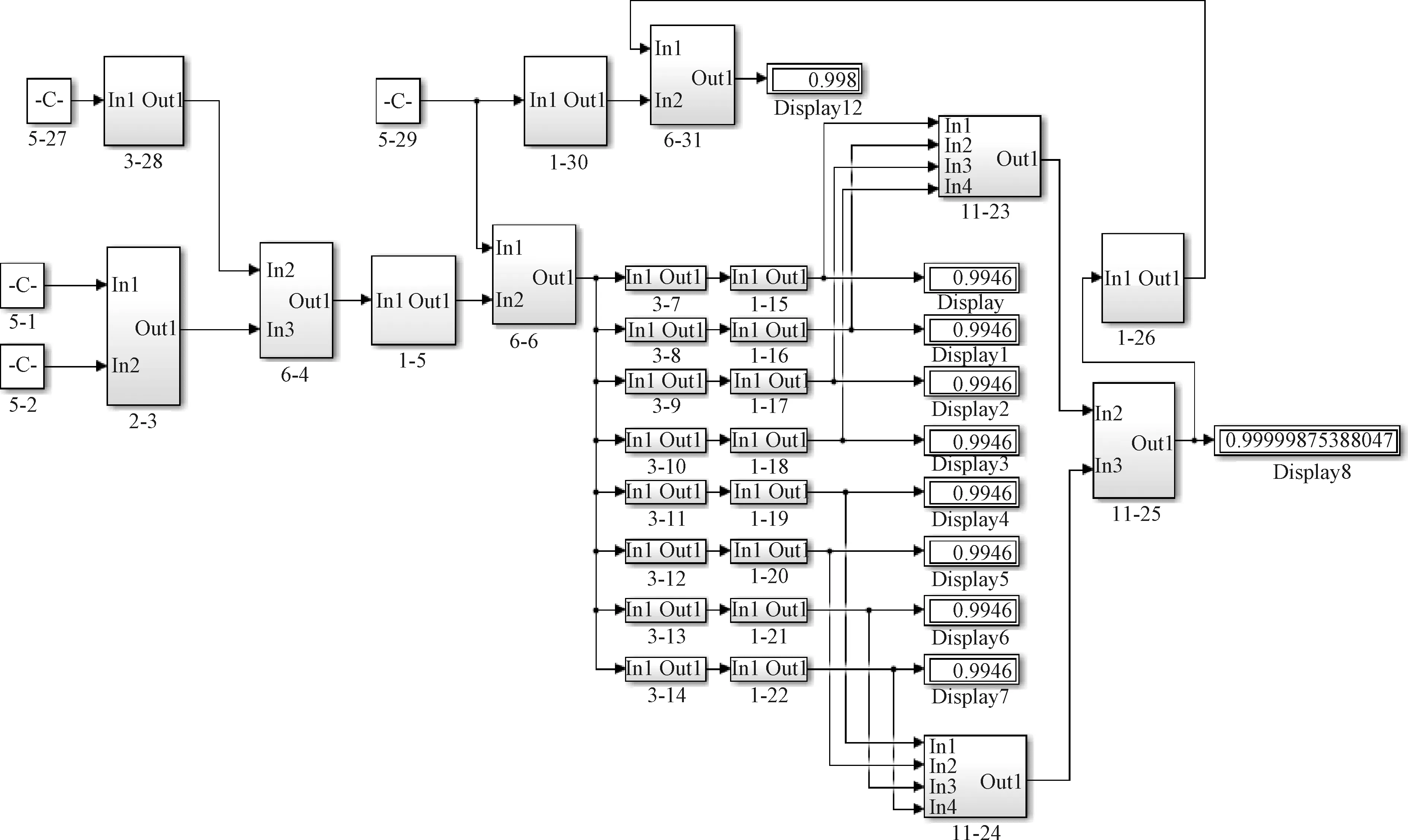
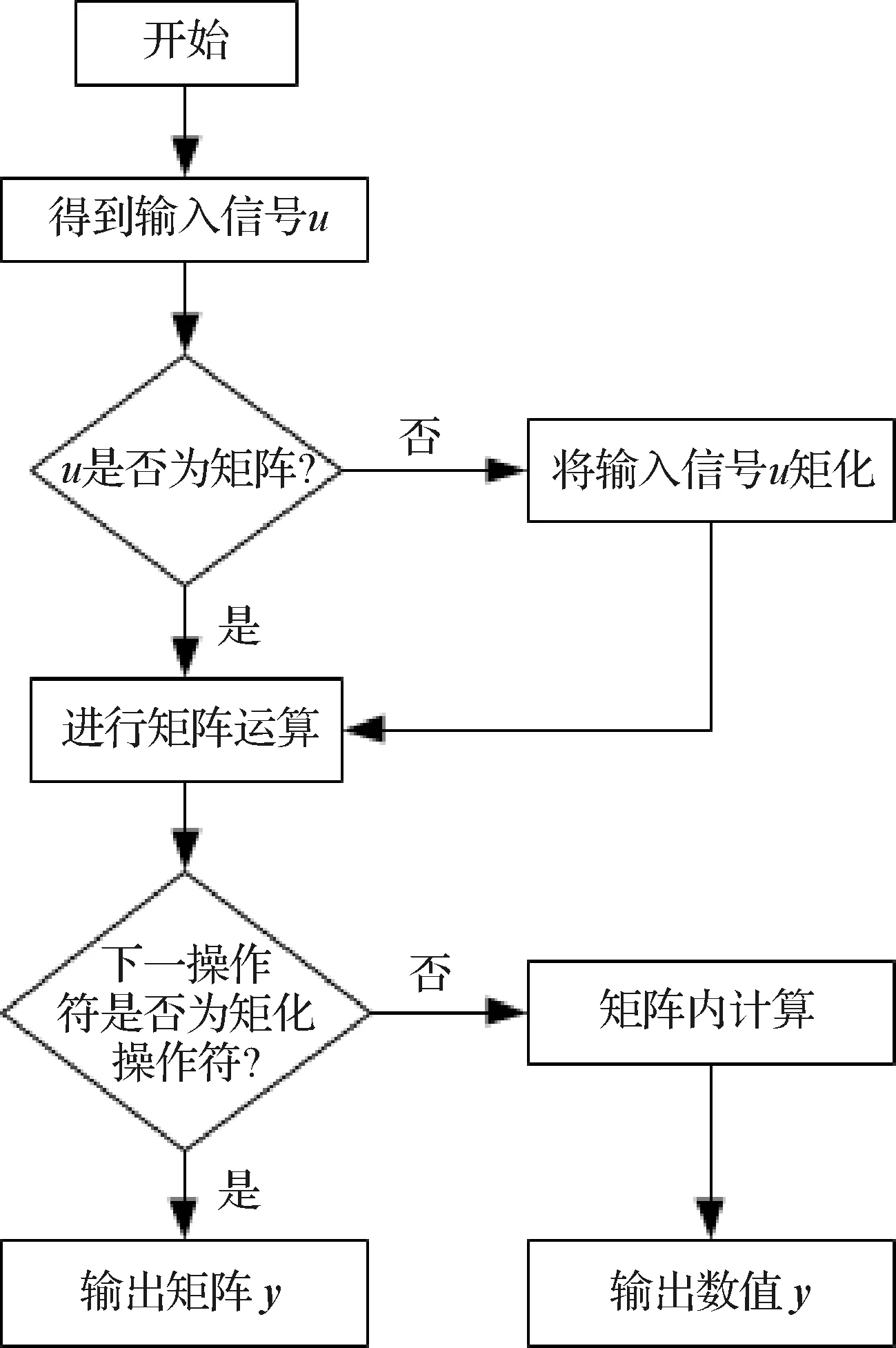
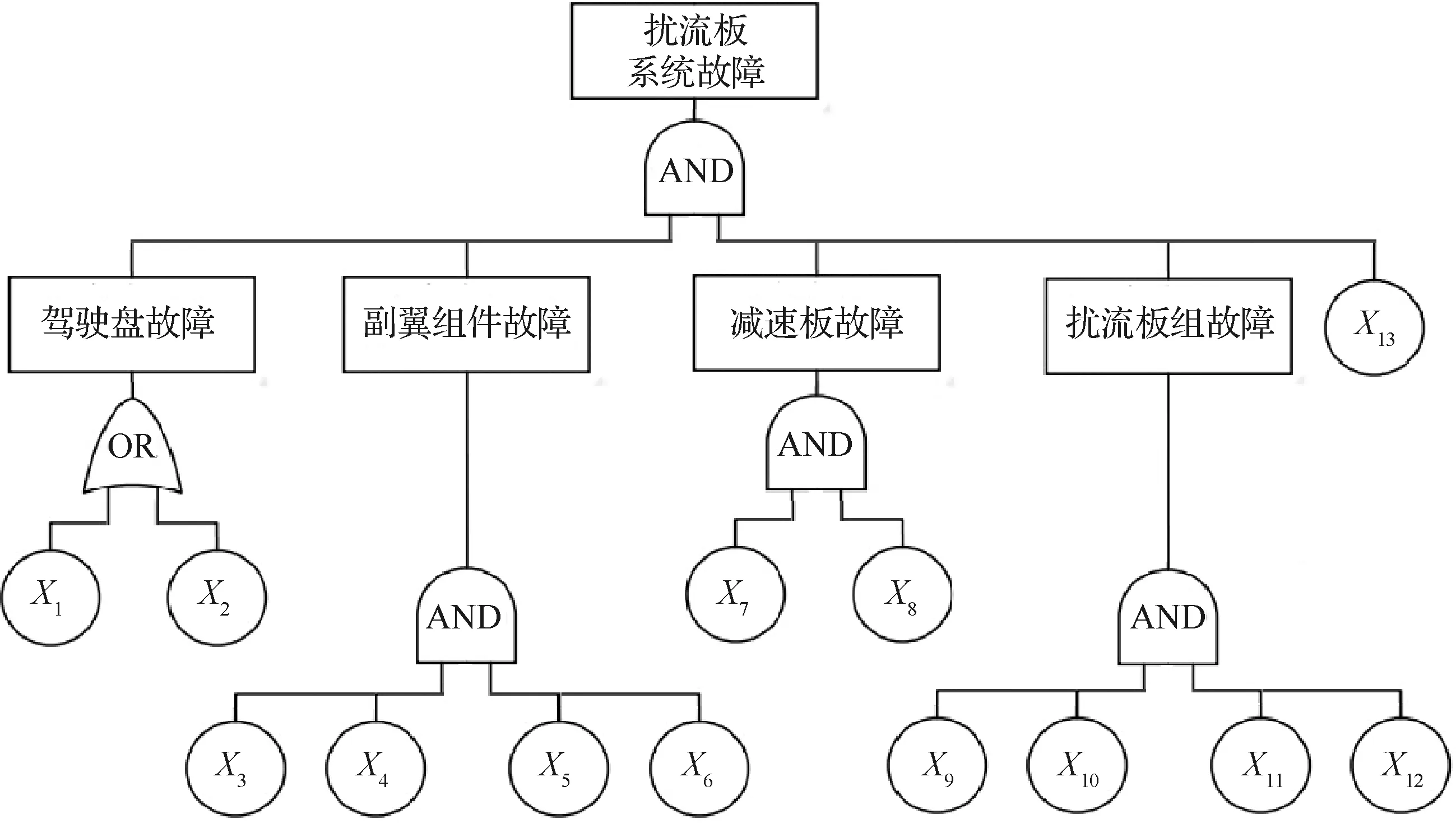
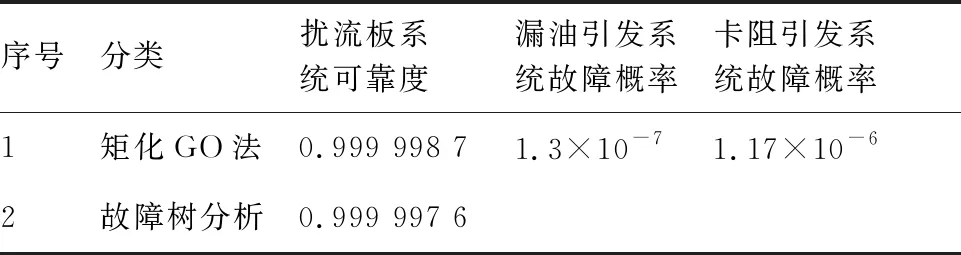
式中:n 扰流板冗余系统M取K门共有4个输入端,分别模拟单侧机翼4个扰流板,当m=4、n=2时表达式为 (2) 数学表达式分为3个部分相加,各部分运算模块封装在子系统中,当m或者n发生变化时,只需增加信号输入的个数,在子系统中增添需要的运算模块即可。 图3 M取K门的SIMULINK模块化表达Fig.3 SIMULINK module expression of M/K 根据系统GO图,使用SIMULINK进行系统建模。各操作符以模块表示,设计出如图4所示的电动飞机扰流板系统可靠性分析仿真界面。 由SIMULINK仿真界面可以看出,模块3-7至1-22为扰流板冗余系统(并联系统),工作原理较为简单但是建模繁琐、工作量大。研究学者针对此问题给出了多种解决方案[16-18]。本文提出一种矩化操作符,可将并联系统在GO法建模时简化处理,降低建模工作量,提高工作效率。 图4 扰流板系统可靠性分析仿真界面Fig.4 Simulation interface for reliability analysis of spoiler system 传统GO运算对扰流板系统可靠性分析时,8条支路各需计算一次,设信号输入成功概率为P(X),扰流板作动筒成功概率为P(αl),扰流板成功概率为P(βl),则第l路的成功概率Pn为 Pn=P(X)P(αl)P(βl) (3) 本文基于GO法的基本运算规则,将矩阵运算与传统GO运算结合,在同一系统中存在标量运算与矩阵运算,可使系统可靠性分析建模简化,计算准确。 定义矩化操作符:信号输入为一标量,可将输入信号组成l×l矩阵。l为信号输入数量,u为信号输入值,y为信号输出,定义矩化矩阵Ji由SIMULINK中的MATLAB fuction模块编辑,矩化流程如图5所示。 矩化操作符可将8个支路进行矩化,原理图如图6所示,可用矩化操作符Ji表示各支路相同工作原理的元件,降低建模工作量。 信号输入u为一标量,矩化操作符将输入信号u矩化为4×4的对角阵T,同时将自身所代表的4个两状态单元数据以矩阵形式同输入信号运算,其具体计算表达式如下: 图5 矩化流程图Fig.5 Matrix flowchart 图6 矩化原理图Fig.6 Matrix schematic (4) (5) (6) (7) 式中:Py为信号流输出;a7~a10、a15~a18分别为操作符7~10、15~18所代表的扰流板作动筒的成功概率。按照信号流顺序依次进行计算,输出矩阵y。当下一操作符不再是矩化操作符时,则需输出标量y,如操作符15~18下一操作符为M取K门操作符,需要输出4个信号,根据矩阵运算,取对角线运算结果u·a7·a15等4个标量,作为信号输出传递给M取K门操作符,结束矩化。矩化方法与传统GO法的运算规则、方法特点如表2所示。 矩化操作符的优点在于可节省绘制GO图的时间,并且能将复杂的GO图并联系统简化,使GO图更加简洁、直观。同时,在GO运算中可随时将标量运算和矩阵运算互相转化,在计算原理上更直观,矩化后的扰流板系统GO图如图7所示。 表2 方法对比Table 2 Method comparison 由图7可以看出,使用矩化操作符创建的GO图相比较于传统GO图(如图2所示)更为简洁,建模工作量降低。同时,根据矩化后的GO图设计SIMULINK仿真界面更为清晰,将传统GO法操作符运算模块以MATLAB fuction模块编辑,更变为矩化操作符的运算规则,具体表达如图8 所示。 图7 矩化后的GO图Fig.7 Matrix GO graph 图8 矩化操作符的SIMULINK模块化表达Fig.8 Modular representation of matrix operators by SIMULINK 根据图7建立矩化后的GO图SIMULINK仿真界面,如图9所示。 图9 矩化GO法的SIMULINK仿真界面Fig.9 SIMULINK simulation interface for matrix GO method 各操作符的赋值由表1中给出,设定系统工作时间为10 s。结果显示,以矩化GO法得出电动飞机扰流板系统的总成功概率为0.999 998 7。 利用故障树分析法对扰流板系统可靠性进行验证。故障树分析法发展于20世纪60年代,是一种安全可靠的分析技术,是目前故障诊断最常用的方法之一,作为成熟的可靠性分析技术被广泛应用于各行领域[19-20]。 对扰流板系统进行失效分析,根据扰流板系统各组件的使用环境、特点以及自身性能,共得到4个中间事件和13个底事件,建立某型电动飞机扰流板系统故障树,如图10所示。 图10 某型电动飞机扰流板系统故障树Fig.10 Fault tree of spoiler system of certain electric aircraft 通过故障树分析,对扰流板系统进行建树并赋值,确定故障树的最小割集分别为:(X1×X3×X4×X5×X6×X7×X8×X9×X10×X11×X12×X13),(X2×X3×X4×X5×X6×X7×X8×X9×X10×X11×X12×X13)。X1:驾驶盘1故障,X3:副翼/方向舵面板故障,X4:副翼作动筒故障,X5:副翼感觉定中组件故障,X6:副翼PCU故障,X7:减速板手柄故障,X8:传感器故障,X9:混合器/比率变换器故障,X10:作动筒故障,X11:扰流板传感器故障,X12:扰流板故障,X13:FDAU故障。故障树计算得到扰流板系统可靠度为0.999 997 6。计算结果与矩化GO法对比如表3所示。 表3 结果对比Table 3 Result comparison 可以看出,矩化GO法得到的扰流板系统可靠度计算结果与故障树分析法计算结果十分接近。与故障树分析相比,矩化GO法更适合多态系统的可靠性分析,对扰流板系统的可靠性分析更为准确,证明使用矩化GO法对电动飞机扰流板系统进行可靠性分析是可行的。 1) 给出GO法第11号操作符M取K门在SIMULINK中的模块化表达,可完成实际工程中冗余系统的GO法计算。 2) 提出矩化操作符的概念,给出矩化操作符运算规则,可将并联系统部分GO图简化。以SIMULINK设计矩化GO图仿真界面,进行电动飞机扰流板系统可靠性分析。通过与故障树分析法对比,证明了矩化GO法在可靠性分析中的合理性,为电动飞机系统可靠性分析提供新的思路。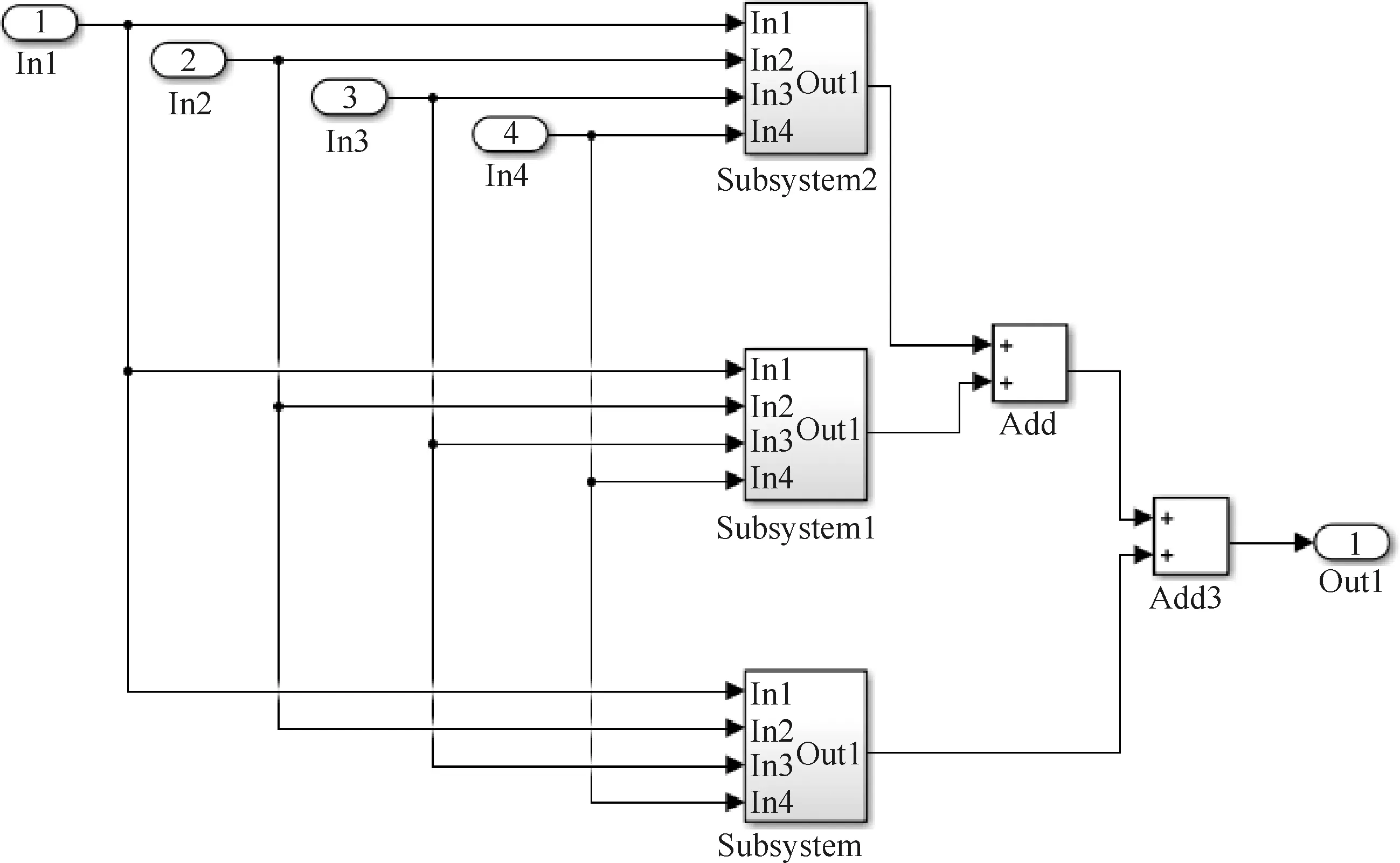
2 矩化操作符在扰流板系统中的应用
2.1 矩化操作符的提出
2.2 矩化操作符的应用


3 电动飞机扰流板系统可靠性分析与验证
3.1 扰流板系统可靠性计算
3.2 扰流板系统可靠性验证
4 结 论
