Kalman滤波在MEMS陀螺仪测量船舶回转率中的应用*
2021-03-26宰德广陈永冰李文魁
宰德广, 周 岗, 陈永冰, 李文魁
(海军工程大学 导航工程系,湖北 武汉 430033)
0 引 言
目前微机电系统(micro-electro-mechanical system,MEMS)陀螺仪的应用越来越普遍,关于如何提高陀螺仪的测量精度也越来越引起人们的关注。通常是对陀螺仪的随机噪声进行建模分析,比如利用时间序列分析的方法对噪声建立ARMA模型,获得相应的参数并设计Kalman滤波器来滤除噪声[1~3]。但对于低成本MEMS陀螺仪来说,造成其误差的因素复杂,随机性较大,很难建立准确的、具有普遍适用性的数学模型[4,5]。实验室现有一船舶回转运动模拟测量系统,其工作原理是通过驱动马达转动来模拟船舶回转运动,同时采用MEMS角速率陀螺仪敏感转台转动测得角速率(即实验室条件下模拟出的船舶回转率),但测量结果不稳定,数据波动较大,需要对测量数据进行滤波处理,以获得较为稳定的输出,实现进一步的船舶操纵控制。
本文从实际应用考虑,对测量数据直接进行滤波处理。
首先通过平均滤波和校正零偏的方法对原始采集信号进行预处理,之后设计了Kalman滤波器对信号进一步滤波,并借助船舶回转运动模拟测量系统,分别在静态、稳定回转率和回转率发生改变的情况下验证Kalman滤波器的效果,针对其动态响应较差的问题,在原有滤波器的基础上改进并设计了量测噪声方差自适应的Kalman 滤波器[6],同样情况下对其验证,以检验所设计的滤波器是否有效可行。
1 数据预处理
本文采用ADXRS系列的MEMS角速率陀螺仪,通过改变船舶回转运动模拟测量系统中自动操舵仪的舵角,即可改变回转率,使MEMS陀螺仪工作在不同状态。为保证测量准确性,每次测量前先通电工作一段时间,待稳定后再采集所需数据,而采集到的原始数据需要先经过平均滤波和校正零偏等预处理,以便于更好地进行Kalman滤波处理。
1.1 平均滤波去除野值
实验发现采集到的信号中往往存在一些数值大小异常的野值,在进行Kalman 滤波前需要对原始的采集信号预处理,剔除野值。

其中求均值公式如下
(1)

1.2 零偏校正
观察还发现,MEMS陀螺仪测量数据存在常值漂移的现象,可通过校正零偏的方法补偿陀螺仪漂移。将系统回转率设定为零,使MEMS陀螺仪工作在零输入状态。通过采集多组静态数据,并通过求均值的方法获得偏移值,此即陀螺仪的零偏,在之后的数据采集和处理中,都需要减去此零偏值以完成零偏校正。
2 Kalman滤波器设计
因为MEMS陀螺仪测得的是转台转动的角速率,故以角速率为状态量,以实际测量值为观测量,且系统噪声W和量测噪声V均为零均值高斯白噪声,系统噪声、量测噪声和被估计的角速率状态量三者互不相关,则有如下离散Kalman滤波状态方程和量测方程

(2)
式中X(k)为被估计的角速率状态量,Z(k)为角速率量测量,W(k)为系统噪声,其协方差矩阵为Q,V(k)为量测噪声,其协方差矩阵为R,A,B,H分别为状态转移矩阵、系统噪声驱动阵和量测阵。
Kalman滤波方程实质为递推公式,可分为2个预测方程和3个更新方程,如式(3)所示
(3)
设系统为一维状态系统,被估计状态量只有角速率,A,B,H分别取为单位阵,实验中只要设定滤波估计初值XKF(0)和协方差阵初值P(0),并给出系统噪声阵Q和量测噪声阵R,即可进行方程的递推和更新,实现Kalman滤波。
3 滤波器性能检验
对于固定的测量系统其系统噪声较为稳定,由经验值设定系统噪声阵Q为0.01。实际测得的角速率即为量测量Z(k),其协方差作为量测噪声阵R,其均方差的10倍设为协方差阵初值P(0)。设定好滤波器参数后,即可通过船舶回转运动模拟测量系统设定静止、恒定回转率和回转率变化三种状态,对设计的Kalman 滤波器进行性能检验。
3.1 静态测试
由上所述可知,MEMS陀螺仪需通电工作一段时间再进行数据的采集。现设定船舶回转运动模拟测量系统的回转率为零,使MEMS陀螺仪处于静止状态,采集10 min原始数据,并对其进行数据预处理和Kalman滤波处理,结果如图1(a)~(c)所示。
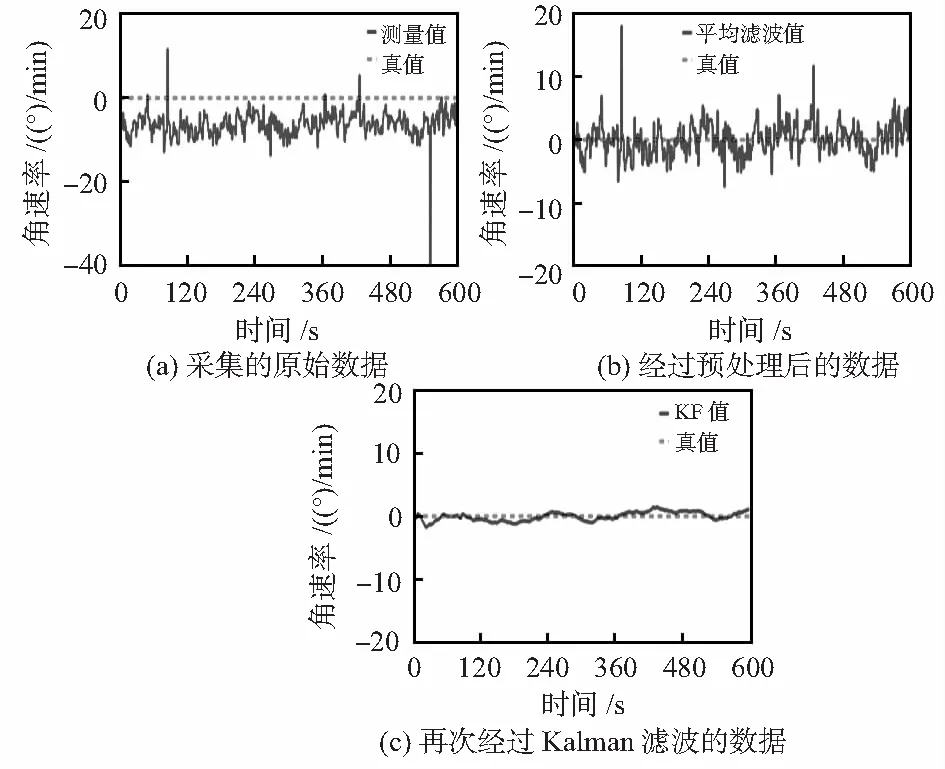
图1 静态数据滤波处理前后对比
从图1的对比图可看出,原始测量值存在个别野值,且整体数据出现偏移,而经过预处理之后的数据零偏现象明显改善,野值信号被滤除,再次经过Kalman滤波处理后,信号降噪效果明显,数据波动很小。计算每次数据处理后的误差均值和误差标准差,结果如表1所示。

表1 静态测试时数据统计特性
由表1可看出,经过数据预处理后的信号其误差均值和标准差都有所降低,再次经过Kalman滤波处理后更是降低一个量级之多,实验表明Kalman滤波器在静态测试时滤波效果显著。
3.2 恒定回转率测试
设定船舶回转运动模拟测量系统的回转率为30°/min,采集10 min稳定数据进行Kalman 滤波处理,结果如图2所示,计算可知,经Kalman滤波后数据误差均值由-3.776°/min降至0.243°/min,而误差标准差由2.344°/min降至0.259°/min,可以看出,在回转率恒定情况下,设计的Kalman滤波器依然具有很好的滤波效果。
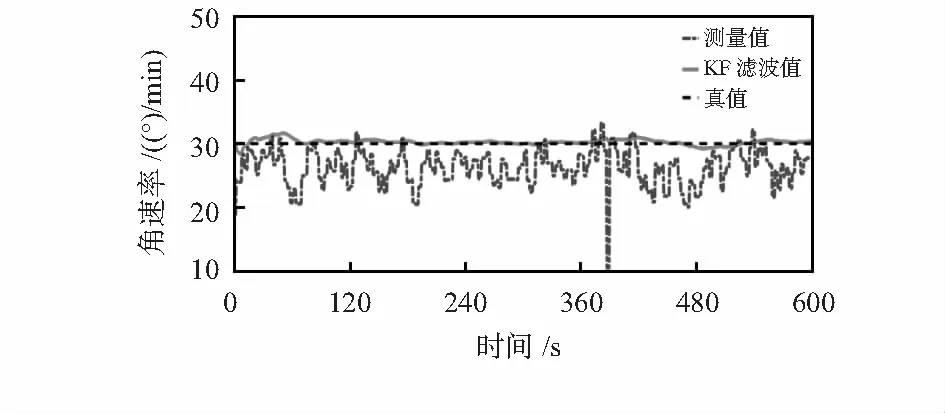
图2 恒定回转率时Kalman滤波前后对比
3.3 回转率变化测试
设定船舶回转运动模拟测量系统开始时处于零回转率状态,在100 s时刻改变舵角,使得回转率发生变化,采集这一时间段内的测量数据,进行Kalman 滤波处理得到结果如图3所示。为便于对比突出Kalman 动态滤波效果,只给出了经过预处理之后的数据曲线和Kalman滤波曲线与真值的对比图。

图3 回转率变化时的Kalman滤波前后对比
从图中可看出当船舶回转率发生改变时,Kalman滤波动态性能变差,出现滞后现象,所设计的Kalman滤波器不再适用,必须对此滤波器进行改进,提高其动态响应性能。
4 改进后的自适应Kalman滤波器
关于如何提高Kalman滤波器的动态性能,很多学者提出了各种自适应Kalman滤波算法,比如过程噪声自适应、最小二乘法估计、设定指数渐消因子、加权Sage-Husa自适应滤波等[7~10]。可知Kalman滤波器中系统噪声阵Q和量测噪声阵R与滤波性能紧密相关,一般Q越大R越小系统动态性能越好,相反则稳态滤波效果越好。对于确定的测量系统其系统噪声较为稳定,而角速率测量值很大程度上受量测噪声影响,故可采用固定Q阵,改变R值的方法,实现自适应滤波。参考文献[6],可针对本实验设计量测噪声阵R自适应调节的Kalman滤波方法,具体算法流程如图4所示。

图4 自适应Kalman滤波算法流程
可知Kalman滤波方程可分为预测方程与更新方程,实现自适应的目的就是根据量测噪声变化趋势自适应改变滤波增益,以调节下一时刻的预测值和滤波估计值,而改变量测噪声阵即可达到改变滤波增益的目的。本算法思想是对每一时刻的状态预测值Xpre(k)与上一时刻的值Xpre(k-1)作差并取绝对值,根据差值大小判断状态量是否发生机动性变化,以作出相应地调整。如图4所示,d为设定的基准值,若两个时刻的预测值差值大于此基准值,则说明角速率发生改变,需要提高滤波的动态性能,R则需要相应减小,即Rg=αLR(0<αL<1);若两个时刻的预测值差值小于此基准值,则说明角速率变化稳定,需要提高稳态滤波效果,使滤波更加稳定,R则需要相应增大,即Rg=αHR(αH>1)。量测噪声Rg更新后,滤波增益Kg也随之更新,即可实现Kalman滤波方程自适应调整,原来的滤波方程改进如下
(4)
设置实验参数时将系统噪声阵Q适当减小,量测噪声阵R适当增大,以便之后对R自适应调整。在实验过程中基准值d和调节因子αL,αH都需要根据实际情况灵活调整,以适应该滤波模型。经多次实验选定d=2,αL=0.05,αH=20。
首先对自适应Kalman滤波器进行同样的静态和恒定回转率测试,滤波后数据误差均值和误差标准差如表2所示,可以看出设计的自适应Kalman滤波器在静态和恒定回转率状态下也可以达到很好的滤波效果。
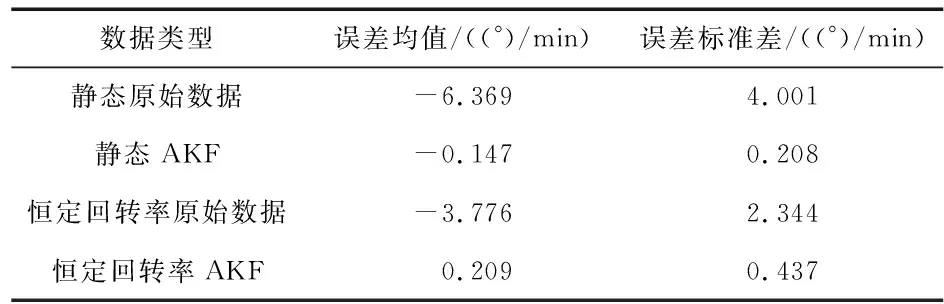
表2 自适应Kalman滤波数据统计特性
同样地,对自适应Kalman滤波器进行动态变化测试,为不失一般性,重新采集了一组数据,通过自动操舵仪在100 s时刻向右打舵使回转率增大,又在350 s时刻向左打舵减小回转率,使得回转率的变化更加复杂,以更好地验证自适应Kalman滤波器的动态性能,曲线图如图5所示。

图5 动态变化时自适应Kalman滤波效果
由图5可以看出,当角速率发生变化时滤波值能够随之变化,虽然在短时间内出现滞后,但是在达到稳态前很快作出响应变化,几乎与真值同时达到稳态,在船舶操纵控制系统中是可行的,而且在达到稳态后的两个阶段滤波效果也不错,计算误差标准差可得,150~350 s时间内由1.743°/min降0.266°/min,400~500 s时间内由1.457°/min降至0.218°/min,可知在回转率动态变化的情况下自适应Kalman滤波器是适用的。
5 结 论
实验分析表明:所设计的自适应Kalman滤波器在达到滤波效果的同时又兼顾了较好的动态性能,是有效可行的。经过数据预处理和自适应Kalman滤波处理,实验室中的船舶回转运动模拟测量系统测得的角速率数据波动得到了有效抑制,获得了较稳定的测量数据,为下一步实现船舶操纵控制奠定了良好的基础。