一种新型水下声学浮标在目标探测中的应用
2021-03-25王超韩梅孙芹东张小川
王超 , 韩梅 , 孙芹东 , 张小川
1. 海军潜艇学院, 山东 青岛 266199;
2. 青岛海洋科学与技术试点国家实验室, 山东 青岛 266237
长期以来, 受国内技术水平和认识上的制约, 水下目标搜索、探测和监视能力相对薄弱, 水下空间成为我国所有国防领域中设防最薄弱的部分。目前, 我国深海大洋区的水下目标探测方式主要还是依靠传统的水面舰艇和航空声纳, 效费比极低且受恶劣海况影响严重, 水下监视预警能力严重滞后于新形势下我国海洋安全面临的严峻威胁和挑战(周宏坤, 2016; 袁华 等, 2016; 尹云龙 等, 2019)。
近年来, 水下无人缓动平台凭借其噪声水平低、隐蔽性能高、环境适应强、成本低、易操作等优点, 在海洋参数测量和水中目标探测方面的应用受到了各国广泛的关注和重视(Holmes et al, 2005; 路振, 2013; 李峰, 2013; Jiang et al, 2013; 杨燕 等, 2015; 沈新蕊 等, 2018)。国外在水下无人平台集成声学测量系统研制与应用方面起步较早, 在水下无人航行器(Unmanned Undersea Vehicle, UUV)探测方面, 美国2013 年公布的“海底侦察兵”UUV, 头部可以安装两个负载, 通过搭载不同传感器可在水下200m 执行反潜任务; 在水下滑翔机技术发展与应用方面, 美国先后研发成功搭载水听器阵列的Xray、Zray、Slucum 等典型样机, 用于巡航侦察海洋中的安静型水下目标。国内在水下无人平台与声学系统集成应用方面的研究相对较少且起步较晚(刘璐 等, 2017; Liu et al, 2018), 西北工业大学基于飞翼滑翔机和沈阳自动化所共同研发了搭载多元声压阵列的飞翼滑翔机声学探测系统; 哈尔滨工程大学用“海燕”滑翔机平台共装载了4 只声压水听器构成声学探测系统, 并在南海海域进行了海上试验; 中科院声学所通过在水下滑翔机平台艏部舱段安装声矢量探测系统, 该系统要求指标为对声源级不小于125dB@1kHz 的目标探测距离大于3km, 并在2014 年完成了湖上和海上测试试验, 但试验只进行了声学系统对单频信号的探测性能, 测试效果不理想且测试内容不完善; 海军潜艇学院从2013 年开始通过对现有“海燕”水下滑翔机平台进行全新优化设计, 目前已成功研制出了具有海洋环境噪声观测和目标探测能力的水下声学滑翔机平台, 并开展了多次海上试验, 相关指标得到了充分验证(王超 等, 2018; 王文龙 等, 2019)。
Argo 浮标作为一种技术相对成熟的水下无人移动平台, 已经被广泛应用于全球海洋环境监测领域, 在“透明海洋”工程立体观测系统中发挥着重要作用(陈鹿 等, 2017)。Argo 浮标上浮和下潜主要采用液压驱动系统进行控制, 依靠改变浮标体积实现沉浮, 可通过岸基甲板单元设置浮标平台下潜深度、定深工作时长等参数, 到达设定时间后, 浮标平台会自动上浮, 上浮过程中利用搭载的各种传感器进行海洋环境剖面测量, 到达海面后, 通过卫星将测量数据上传至岸基指挥所。水下声学浮标作为一种新型水下无人移动探测平台, 是集浮标平台技术和声学探测技术于一体, 通过在现有Argo 浮标平台基础上集成声学测量系统, 可对水中目标进行信号采集和预警探测(王超 等, 2019)。虽然水下声学浮标不具有自身航行控制能力, 难以实现对水中目标连续跟踪, 但其体积小、重量轻、成本低、便于布放回收, 且只有在水面下潜阶段和水下准备上浮阶段油泵电机工作时才会产生短暂的平台噪声, 搭载的声学系统除受海洋环境噪声外而无其他噪声干扰, 根据水文条件可把水下声学浮标设置到最佳工作深度, 且其观测成本低, 多枚浮标成阵组网使用即可形成大面积区域覆盖, 实现对指定海域水下目标的隐蔽侦察与探测, 与航空声纳浮标相比, 水下声学浮标工作时间更长, 能够长时间、大范围进行水中目标隐蔽探测。
总体而言, 水下声学浮标在海洋方面的应用仍在适应性验证阶段, 针对水下声学浮标对海上目标探测方面的评估研究比较少, 该文旨在利用2019 年8 月在南海某海域开展的多台水下声学浮标海上试验, 进一步验证研制的水下声学浮标在南海深水区对海上目标探测能力。
1 海上试验及数据处理
1.1 水下声学浮标

图1 搭载声学测量系统的水下声学浮标示意图 Fig. 1 Underwater acoustic buoy integrated with acoustic monitoring system
水下声学浮标结构示意图如图1 所示, 主要由北斗天线、矢量水听器、水声信号处理机、主壳体、驱动转置、主控系统、电池、尾壳和油囊护罩组成。矢量水听器为两端带半球帽的同振式矢量水听器(孙芹东 等, 2015, 2016), 其工作频带20Hz~5kHz, 矢量通道自噪声≤46dB@1kHz, 指向性分辨力≥30dB, 矢量通道声压灵敏度级≥-180dB@1kHz, 声压通道自噪声≤38dB@1kHz, 声压通道声压灵敏度级≥-192dB, 最大耐压深度为1500m。工作过程中矢量水听器根据任务要求采集水声信号, 水声信号处理机完成对采集信号的实时处理分析和早期预警判别。
图2 给出了水下声学浮标水中目标探测流程图, 其可多次上浮和下潜, 具备原位坐底和定深漂流两种工作模式, 其海上连续工作时长则与目标探测工作策略和自动上浮通信周期有关。水下声学浮标平台功耗最大的系统装置为水声信号处理机, 其功耗约为6W, 在平台上浮下潜周期为1d 且声学测量系统不工作情况下, 声学浮标能够实现海上连续工作时长多达300d; 而在声学测量系统全时工作情况下, 声学浮标一般仅能工作十几天。

图2 水下声学浮标目标监测流程图 Fig. 2 Flowchart of underwater acoustic buoy detecting target
1.2 试验简介
青岛海洋科学与技术国家实验室自2013 年开展矢量水听器在水下无人平台上应用研究以来, 共开展了30 多次消声水池和海上试验。为进一步验证研制的水下声学浮标在南海深水区对海上目标探测能力, 2019 年8 月开展了包含8 台水下声学浮标的南海试验, 本文以1#浮标采集数据进行分析说明。试验海区位于北纬16°59′至17°31′, 东经110°37′至110°59′之间, 试验海域深度约为1500m, 离三亚港约 160km。试验海区浪高 1~1.5m, 海表流速约0.5m·s–1, 海况2~3 级, 温跃层70m 以浅, 70m 以深负梯度。图3 给出了声源深度5m, 接收深度200m, 频率1kHz 频点处, 利用测量得到的声速剖面计算得到的传播损失随距离变化情况。
1.3 目标方位估计方法
基于单矢量水听器的目标方位估计算法有很多, 但总体上可以根据测向原理分为两大类: 一是基于声能流的方位估计, 如平均声强器、互谱声强器、直方图法以及加权直方图法等; 二是将矢量水听器的各通道看作是多元阵列, 各阵元在空间同一点, 利用单矢量水听器自身具有阵列流型的特点, 将现 有的阵列信号处理方法应用于单矢量水听器(方尔正 等, 2005; 吴艳群 等, 2010; 梁国龙 等, 2011; 李峥 等, 2012; 宋德枢 等, 2014; Wang et al, 2014; Najeem et al, 2017; Aktas et al, 2018)。本文选用更适用于工程应用、鲁棒性和稳健性较好的加窗直方图方位估计算法, 通过采用时间加窗可提高矢量水听器的处理增益, 增强矢量水听器对水下弱目标信号的检测能力。
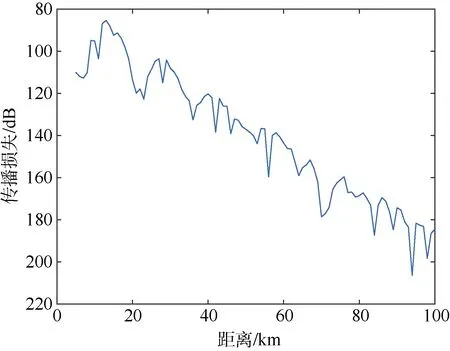
图3 频率1kHz 传播损失 Fig. 3 Transmission loss at 1 kHz
然而由于海洋中洋流、内波、潮汐等复杂环境影响, 矢量水听器搭载在浮标平台上进行水中目标探测时, 矢量水听器会产生俯仰、翻转和横滚等姿态变化, 矢量水听器探测到的是相对于自身坐标系的目标方位, 在实际工程应用中我们往往希望得到的是目标相对统一的地理坐标系方位, 因此必须提供矢量水听器相对于地理坐标系的实时姿态信息, 再通过姿态校正得到待测目标的准确方位。本文通过在浮标平台声学测量系统耐压舱内集成一种微型姿态传感器, 用于测量浮标平台在工作期间的实时
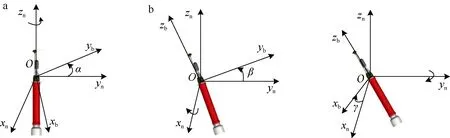
图4 浮标姿态角定义示意图 a. 航向角; b. 俯仰角; c. 横滚角 Fig. 4 Diagram of attitude angle definition. (a) heading angle, (b) pitch angle, and (c) roll angle
一般来讲, 影响水下声学浮标目标测向精度的误差源主要有3 个: 矢量水听器内部加速度计装配误差、姿态传感器测向误差以及矢量水听器与姿态传感器的对准误差, 其中所用姿态传感器的测向精度为1°, 而矢量水听器内部加速度计装配误差和矢量水听器与姿态传感器的对准误差为固定误差, 且可以通过提高加工精度和装配工艺来尽量减小该误 差, 目标测向精度的整体误差可控制在2°以内。


2 试验处理结果与分析
2.1 目标探测结果分析
试验期间, 水下声学浮标采用定深漂流工作模式探测海上目标, 浮标设置定漂深度为200m, 容差±100m, 即浮标平台在100m~300m 深度范围内电机不工作, 声学系统在浮标平台深度大于100m 后开始上电采集水声信号, 船舶自动识别系统和雷达设备实时接收试验海区水面航船信息, 目标方位采用直方图算法进行计算, 加窗长度 5s, 处理频段为200Hz~3kHz。以下选用1#浮标第2 天试验数据进行分析, 图5a 给出了1#浮标平台在12:33—14:02 时间段内平台深度随时间变化情况。由图5a 可以看出, 1#浮标该时间段内平台深度基本稳定在220m 左右。图5b 给出了1#浮标平台姿态角随时间变化, 可以看出, 浮标平台在整个定深漂流工作期间横滚角为–180°, 俯仰角为0°, 而航向角则不断发生变化, 表示浮标在工作时姿态正立但平台发生旋转。图5c 给出了该时间段内浮标声学系统接收的水面航船(船舶识别号: 414350640, 船长42m, 船宽6m, 航速8.4kn, 航向 301°)噪声信号估计方位历程伪彩图, 图5d 为浮标平台和水面航船在该时间段内距离历程图。由图5c 和5d 可以看出, 12:33—14:02 时间段内水面航船距离浮标平台最近距离约为1.9km, 最远距离为13.8km, 在整个时间段内1#浮标可全程探测水面航船方位。

图5 试验处理结果 a. 浮标平台深度随时间变化; b. 平台姿态角随时间变化; c. 噪声信号估计方位历程伪彩图; d. 平台与水面航船距离随时间变化 Fig. 5 Experiment results. (a) platform’s depth with time, (b) 1# attitude’s angle change with time, (c) bearing time recordings (BTRs), and (d) distance between 1# and surface vessel
图6 给出了12:33—14:02 时间段内1#浮标对水面航船估计方位与真实方位间的均方根误差(Root Mean Square Error, RMSE)和估计方位的标准差(Standard Deviation, SD)随时间变化曲线, 其中 RMSE 表示浮标对水面航船目标的方位估计值与GPS 真实方位之间的误差, 在真实方位准确情况下RMSE 代表方位估计偏差; SD 表示估计方位历程的清晰度, 其为方位估计值与方位估计历程拟合值的偏差, SD 越小目标方位估计历程图越清晰, 更能准确反映目标航行轨迹。图5 和图6 可以看出, 在浮标平台与水面航船距离较远时, RMSE 和SD 大小基本一致, 在4°~10°之间; 在浮标平台与水面航船距离较近时, SD 则相对较小, 在水面航船距离浮标平台1.9km 时, SD 可达2°, 而RMSE 则相对较大, 这是由于浮标平台水下推算位置点存在偏差导致距离较近时浮标与水面航船间真实方位相对较大造成的。图7 给出了12:33—14:02 时间段内1#浮标和水面航船相对位置态势图, 结合图5c、图6 和图7 可以看出, 当水面航船由远及近靠近浮标平台时, 1#浮标与水面航船的探测距离为10.2km, 而水面航船由近及远远离浮标平台时, 浮标对水面航船的探测距离则为13.8km, 即浮标对远离水面航船的目标的探测性能更优, 这是由于水面航船远离浮标时螺旋桨朝向浮标, 浮标声学系统接收信号信噪比相对较大引起的。
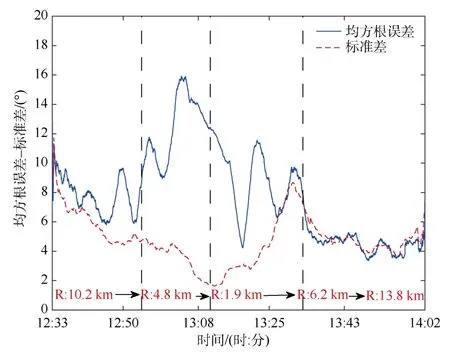
图6 目标方位估计均方根误差和标准差 R 表示浮标与航船之间的距离; 箭头表示距离变化; 垂直虚线表示距离分隔线 Fig. 6 RMSE and SD of target estimation direction

图7 浮标平台与水面航船位置态势图 红色线段表示浮标航迹; 蓝色线段表示水面航船航迹; 红色时间表示浮标出水时间; 蓝色时间表示该时间对应的水面航船位置 Fig. 7 Relative positional situation of buoy platform and surface vessel
2.2 噪声谱级变化分析
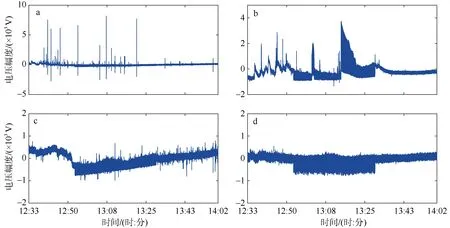
图8 时域信号随时间变化 a. P 通道; b. Vx 通道; c. Vy 通道; d. Vz 通道 Fig. 8 The original signal change with time. (a) P channel, (b) Vx channel, (c) Vy channel, and (d) Vz channel
为定量分析水面航船经过浮标平台过程中浮标声学系统4 个通道接收信号时域变化和频谱变化, 采集12:33—14:02 时间段内1#浮标声学系统声压通道(P 通道)、矢量X 通道(Vx通道)、矢量Y 通道(Vy通道)和矢量Z 通道(Vz通道)的时域噪声信号(图8)。因为1/3 倍频程谱可很好的反应海洋环境噪声频谱特性, 图9 给出了声学系统4 个通道采集信号在20Hz、60Hz、100Hz、200Hz、1kHz 和3kHz 频点处1/3 倍频程谱级随时间变化曲线。图10 给出了声学系统 4 个通道采集信号处理得到的频谱图。 从图9 和图10 可以看出: 1) 水面航船距离浮标平台约4.8km 时, 声学系统声压通道噪声谱级在200Hz以上的高频段出现突然升高的现象, 在 200Hz、1kHz 和3kHz 3 个频点处噪声谱级分别升高了约7dB、6dB 和4dB; 在水面航船距离浮标平台6.2km时, 声学系统声压通道噪声谱级在1kHz 和3kHz 两个频点处却出现噪声谱级突然下降的现象, 而水面航船距离靠近对声压通道100Hz 以下的低频段却基本没有影响, 这是由于声压通道自噪声在100Hz 以下低频段相对较大造成的; 2) 在水面航船靠近浮标(距离4.8km)和远离浮标(距离6.2km)这个由远及近再由近及远的过程中, 声学系统3 个矢量通道噪声谱级在60Hz 以上的高频段都有不同程度的升高, 其中X 通道60Hz 以上频段噪声谱级在水面航船距离较近时变化较剧烈, 这可能是由于X 通道“8”字形最大值指向水面航船所致, 而Y 通道和Z 通道噪声谱级在整个频段范围内变化则相对平稳, 在60Hz和100Hz 两个频点处Z 通道噪声谱级分别升高了约4dB 和6dB, 而在200Hz、1kHz 和3kHz 3 个频点处Z 通道噪声谱级则均升高了约8dB; 3) 在200Hz 以下的低频段, 矢量通道噪声谱级比声压通道噪声谱级大, 这是由于矢量通道自噪声在低频段相对较大造成的; 4) 水面航船在靠近浮标距离4.8km 和远离浮标距离6.2km 这个由远到近再由近及远的过程中, 声学系统4 个通道噪声谱级在这两个距离处噪声谱级突然升高和降低也验证了水面航船船尾部方向声源级较高的结论。

图10 各通道接收信号频谱图 a. P 通道; b.Vx 通道; c. Vy 通道; d Vz 通道。R: 浮标与航船之间的距离; 箭头表示距离变化; 垂直虚线表示距离分隔线(无特殊含义) Fig. 10 Signal spectrogram. (a) P channel, (b) Vx channel, (c) Vy channel, and (d) Vz channel
3 结果与结论
本文利用2019 年8 月份在南海海域开展的水下声学浮标海水试验, 进一步验证了水下声学浮标对海上目标的探测性能, 试验结果分析表明: 1) 南海良好水文环境条件下, 水下声学浮标对航速8.4kn 的水面航船目标最远探测距离可达13.8km, 在水面航船距离浮标平台 1.9km 时, 方位估计标准差可达2°; 2) 水面航船距离水下声学浮标平台某个距离处, 声学系统各通道噪声谱级在 200Hz以上的高频段存在突然增大和减小现象, 但各通道谱级变化存在差异。水下声学浮标是具备高隐蔽和低成本优点的无人平台, 是未来水下无人探测手段的重要组成部分, 下一步将重点加强多平台协同探测技术。