铠装脐带缆ROV作业距离分析
2021-03-24邱可陈浩深圳海油工程水下技术有限公司广东深圳518067
邱可,陈浩(深圳海油工程水下技术有限公司,广东 深圳 518067)
0 引言
在非洲某浅水铺管项目中,作业水深为6~40 m,主作业船舶为海油工程某大型铺管作业船,搭载一台150马力的工作级ROV。该ROV为铠装脐带缆Free-Swimming类型,其主要作业任务为协助主作业船布设海管起始锚和起始封头、海管铺设过程着泥点监控、临时解钩弃管和挂钩起管以及布设终止封头等作业。根据海管规格和作业水深测算出铺设过程中的着泥点与船尾距离为180~340 m。为了核实该主作业船所搭载的ROV的作业距离是否满足该项目海管着泥点监控需求,通过仿真软件,测算出ROV铠甲脐带缆外表面未加装浮力材料时和加装浮力材料时所能飞行达到的最大距离。
1 ROV设备技术参数
表1为150HP工作级ROV实际向前推力参数和铠装脐带缆技术参数。
2 未加装浮力材料时ROV作业距离仿真模拟
表2为ROV铠装脐带缆外表面未加装浮力材料时仿真模拟软件中设置的环境参数。结合地质调研数据,作业区域地处赤道附近,没有台风影响,常年有15级左右的西北风,表面流速平均在0.5级左右,浪高在0.5~1 m之间。根据实际情况,设置一般情况下平均海流流速数值、流向和海底摩擦系数等参数。值得注意的是,该ROV所设计的最大向前推力为900 kgf,但工程实际运用中,考虑到ROV运转过程的动力分配和高温影响等问题,一般将ROV的输出功率调至50%,即是最大向前推力为450 kgf。
表3为铠装脐带缆未加装浮力材料时仿真模拟出的最大作业距离值。
综上,得出当ROV铠装脐带缆未加装浮力材料且输出功率为50%时,海况为静态时ROV的最大作业距离为264 m,平均浪高为0.5 m时ROV的最大作业距离为230 m,平均浪高为1 m时ROV的最大作业距离为180 m。显然,实际作业中海况不可能为静态,因此当ROV铠装脐带缆未加装浮力材料时,最大的作业距离一般以平均浪高为1 m考虑,即为180 m,不能满足项目所要求的着泥点与船尾距离为180~340 m的着泥点监控作业。

表1 ROV推力参数和铠装脐带缆技术参数

表2 铠装脐带缆未加装浮力材料时仿真参数

表3 铠装脐带缆未加装浮力材料时仿真模拟的最大作业距离值
3 加装浮力材料时ROV作业距离仿真模拟
ROV铠装脐带缆加装浮力材料时仿真模拟软件中设置的环境参数与未加装浮力材料时一致。考虑到浮力材料的浮力大小、安装间距、规格尺寸等,将浮力材料设计分为浮力5 kg级和10 kg级。图1是根据铠装脐带缆尺寸设计的快速安装卡扣式浮球。

图1 铠装脐带缆安装的卡扣浮球
表4为铠装脐带缆加装20个5 kg级和20个10 kg级浮力材料仿真模拟数据。

表4 铠装脐带缆加装20个5 kg级和20个10 kg级浮力材料仿真模拟数据
图2为ROV在距离船尾340 m的模拟示意图。
图2 ROV距离船尾340 m的模拟示意图
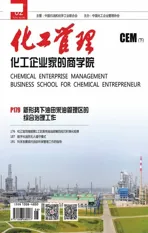
图3为铠装脐带缆安装5 kg级和10 kg级浮力球后触泥点距离ROV 100 m示意图。靠近ROV端为5 kg级浮球,第一个浮球距离ROV为15 m,5 kg级浮球的间距为1 m,10 kg级浮球的间距为2.5 m。

图3 铠装脐带缆安装5 kg级和10 kg级浮力球后触泥点距离ROV 100 m示意图
综上,得出当ROV铠装脐带缆加装浮力材料且输出功率为50%时,海况为静态时ROV的最大作业距离为370 m,平均浪高为0.5 m时ROV的最大作业距离为355 m,平均浪高为1 m时ROV的最大作业距离为340 m,能满足项目所要求的着泥点与船尾距离为180~340 m的着泥点监控作业。
4 铠装脐带缆加装级浮力材料实际应用情况
在该项目中,实际的作业水深在6.8~42 m,作业期1月份正值雨季,风速明显增大,白天风速平均在20级左右,浪高平均在2 m左右,通过铠装脐带缆上加装浮力材料后,ROV圆满的完成了实际的海管铺设过程中的着泥点监控作业。实际作业工程中积累了相应的作业经验。
(1)加装和拆卸浮力材料耗时较长,若是海管铺设速度较快时,这种方式不能很好地配合铺设速度,因此铠装脐带缆Free-Swimming ROV类型不是最佳选择,建议选用软缆零浮力Free-Swimming ROV类型。
(2)模拟出的最后一个浮球距离脐带缆的着泥点有5~10 m的距离,处于悬浮状态。但实际应用过程中,按照实际设计的浮力10 kg级的浮球2.5 m间距安装,受脐带缆自身重力的影响,倒数两到三个浮球基本是接触海底,呈拖拽现象,很容易脱落。因此,通过不断的尝试更改安装间距,增加3个10 kg级浮球且倒数5个浮球的安装间距调整为1 m后,最后一个浮球距离脐带缆着泥点为5 m。
(3)安装浮球之后,铠装脐带缆还有200 m左右拖拽在海床上,由于自身的重力和摩擦力影响,ROV的飞行灵活性会受一定影响,这就要求ROV操作人员要和收放系统操作人员保持不间断的语音通话,进行默契配合,脐带缆时刻保持合适的张力,保证ROV的动作安全和灵活性。
(4)在通过特殊地形地貌时,要注意脐带缆不被缠绕和浮球不被卡住,选择安全合适的飞行路径,保证脐带缆和ROV的安全。当发现无论如何调整ROV的输出功率都不能大幅度动作时,要考虑是否已经缠绕或脐带缆张力过大,此时应当综合判断之后再做处理。
(5)在回收ROV时,由于脐带缆的张力较大,人员在拆卸浮球时要保持合适的安全距离,防止人员受伤。
5 结语
ROV的运用场景多样化,目前可以完成导管架检测、导管架安装支持、海管铺设支持、海底管线巡检、海底电缆铺设和检测、膨胀弯安装支持、海底管线悬跨处理、采油树安装支持、水下基盘安装支持、清管试压支持、跨接管安装、风电水下部分安装支持以及其他应急抢修作业。以往海油工程水下作业部分是由潜水员完成,但随着水深的不断加大,常规的空气潜水和饱和潜水不能满足现有作业水深的工程项目,ROV的作业能力和操作人员的技术水平不断提升,有助于海油工程的持续发展和深入。ROV的作业距离大小是衡量ROV作业能力的重要指标之一,ROV作业公司在投标之前要认真研究施工合同中所要求的ROV作业距离,选择合适的ROV类型,或者采用上述或其他措施来增大ROV的作业距离。文章以项目实际为背景,通过仿真模拟的方式进行ROV作业距离的分析研究,给现场实际作业提供了可靠依据,并按照仿真模拟的结果运用到实际项目中,但受现场流速、流向、风速等不稳定因素的影响,所安装的具体的浮球数量和间距会有细微调整,但不影响实际施工效果。