用于肠道机器人的螺旋式平板发射线圈对设计
2021-03-23庄浩宇颜国正
庄浩宇,颜国正,2*,赵 凯,费 倩
(1.上海交通大学电子信息与电气工程学院,上海200240;2.上海交通大学医疗机器人研究院,上海200240)
1 引 言
采用无线电能传输(Wireless Power Trans⁃mission,WPT)技术供能的肠道机器人在肠道疾病微创诊疗方面具有重要的应用价值[1-4]。相比无线胶囊内窥镜[5-7],微型仿生肠道机器人具有能够在肠道中自主运动,实现在局部扩张驻留,可进行定点采集和传输图像信息等优点。因为功能复杂,肠道机器人的供能问题是一个挑战,多功能诊疗机器人的功耗一般在500 mW以上[8],常见的商用纽扣电池无法为机器人提供充足的电力,而拖缆式供电方案限制了行程距离,并且存在划伤肠道的风险[9]。基于近场感应耦合原理的WPT技术可以为肠道机器人提供连续的电能,被认为是解决供能问题的最有前景的方案之一[10-11]。
发射线圈是WPT系统的设计重点。目前,较为典型的发射线圈结构主要有螺线管、螺线管对、双层螺线管对、分割螺线管以及亥姆霍兹线圈[12-15]。文献[16]使用改进型亥姆霍兹线圈,获得了更好的磁场均匀性和接收功率稳定性,但是由于引入了辅助线圈,使得原本亥姆霍兹线圈对的体积进一步增加。以上线圈形式均采用中空圆柱体轴向绕线的方式,普遍占用空间较大,极大限制了被检查者的活动空间。平面螺旋线圈多应用于电动汽车无线充电[17-19],该场景下发射和接收线圈一般采用同一结构,且尺寸基本一致,线圈距离较近,为紧耦合谐振,无法直接应用于发射线圈和接收线圈的距离及尺寸差异均较大的肠道机器人WPT系统。文献[18]对基于紧耦合的平板式螺线管耦合器和平板式方形耦合器的磁通密度进行了仿真分析,但并未进行实验验证。文献[19]理论分析了松耦合情况下方形和圆形平面螺旋线圈形式在WPT中的差异,证明方形线圈是更好的选择。
本文提出了一种用于肠道机器人松耦合WPT系统的轻薄型发射线圈结构,使用方形螺旋式绕制的平板线圈对组合成发射线圈,相比传统的发射线圈结构,极大缩减了线圈的轴向长度,有效减少了发射线圈的体积。对线圈内部的磁通密度分布进行了仿真分析,并使用利兹线绕制了线圈对进行了实验验证,发射线圈和接收线圈回路同时调谐,确定了WPT接收效率最大时的谐振频率,实验得到的负载接收电压的分布与仿真结果一致,能量传输效率和接收功率满足机器人的作需求。
2 肠道机器人WPT系统
本文采用基于电磁感应的无线能量传输系统,系统整体框图如图1所示。发射端在人体外,由方波控制信号产生交流电激发交变磁场;接收端集成在微型仿生机器人内部,通过电磁感应产生感应电动势,通过整流滤波和稳压电路,获得稳定的能量,供负载使用。初级线圈和次级线圈均与电容组成LC谐振电路,在相同的频率下通过谐振来传输能量。由电磁耦合原理可知:当发射端和接收端的LC回路均在同一频率下谐振时,能量传输的效率最高。

图1 无线电能传输系统框图Fig.1 Block diagram of wireless power transmission sys⁃tem
本文主要研究发射线圈对于系统传输效率的影响。为了定量分析,建立了如图2所示的无线供能系统等效电路模型。L1和L2分别是发射线圈和接收线圈的自感,R1和R2分别为线圈的交流电阻,M为两线圈之间的互感,Vt(f)为发射线圈的电压,I1(t),I2(t)分别为发射线圈、接收线圈的电流,RL为负载电阻。
由分析可知,等效电路的回路方程为:

当发射端和接收端的谐振频率均为f时,系统的传输效率为:

其中:α=RL/R2为负载因数,Qt和Qr(Q=ωL/R)分别是发射线圈和接收线圈的品质因数,k=M/L1L2是线圈之间的耦合系数。

图2 无线电能传输系统的等效电路模型Fig.2 Equivalent circuit model of WPT system
对于弱耦合WPT系统,接收线圈对于发射端的影响可以忽略(k2QtQr≪1),此时式(2)可以简化为:

由式(3)可以看出,当接收回路阻抗匹配时(α=1),WPT系统的传输效率最大。影响能量传输效率的主要因素是耦合系数和线圈品质因数。而耦合系数主要由线圈的几何尺寸、有无磁芯以及相对位置关系决定。在实际使用中,由于机器人内部空间的限制,接收线圈的尺寸相对外部的发射线圈来说差异较大,导致耦合系数很低,一般在10-3数量级。
3 仿真分析
通过Comsol软件,对螺旋式平板对发射线圈内部磁场分布进行仿真分析。由于线圈匝数较大,故采用非显式建模,单层绕制匝数为34,电流激励设置为1 A,频率为220 kHz。平板线圈对相对于z轴对称,两线圈平面串联,距离500 mm放置。线圈模型及线圈内部的磁通密度分布如图3所示。

图3 线圈对内部的磁通密度分布Fig.3 Magnetic flux density distribution in coil pair
由于在仿真时未考虑实际使用利兹线对涡流损耗的减小,且未考虑谐振时对线圈回路的影响,在高频时线圈阻抗较大,使用恒定电压时回路中通过的实际电流较小,故采用恒定电流激励。参考图3所示的坐标系,图4表示了线圈内部切面的磁场分布。其中,xoy平面为与线圈平面平行的切面,z轴为线圈对的中心轴。可以看出,z=150 mm时xoy平面的均匀度最好;在z=0到z=150 mm平面,随着与线圈平面距离接近,磁通密度逐渐增大。
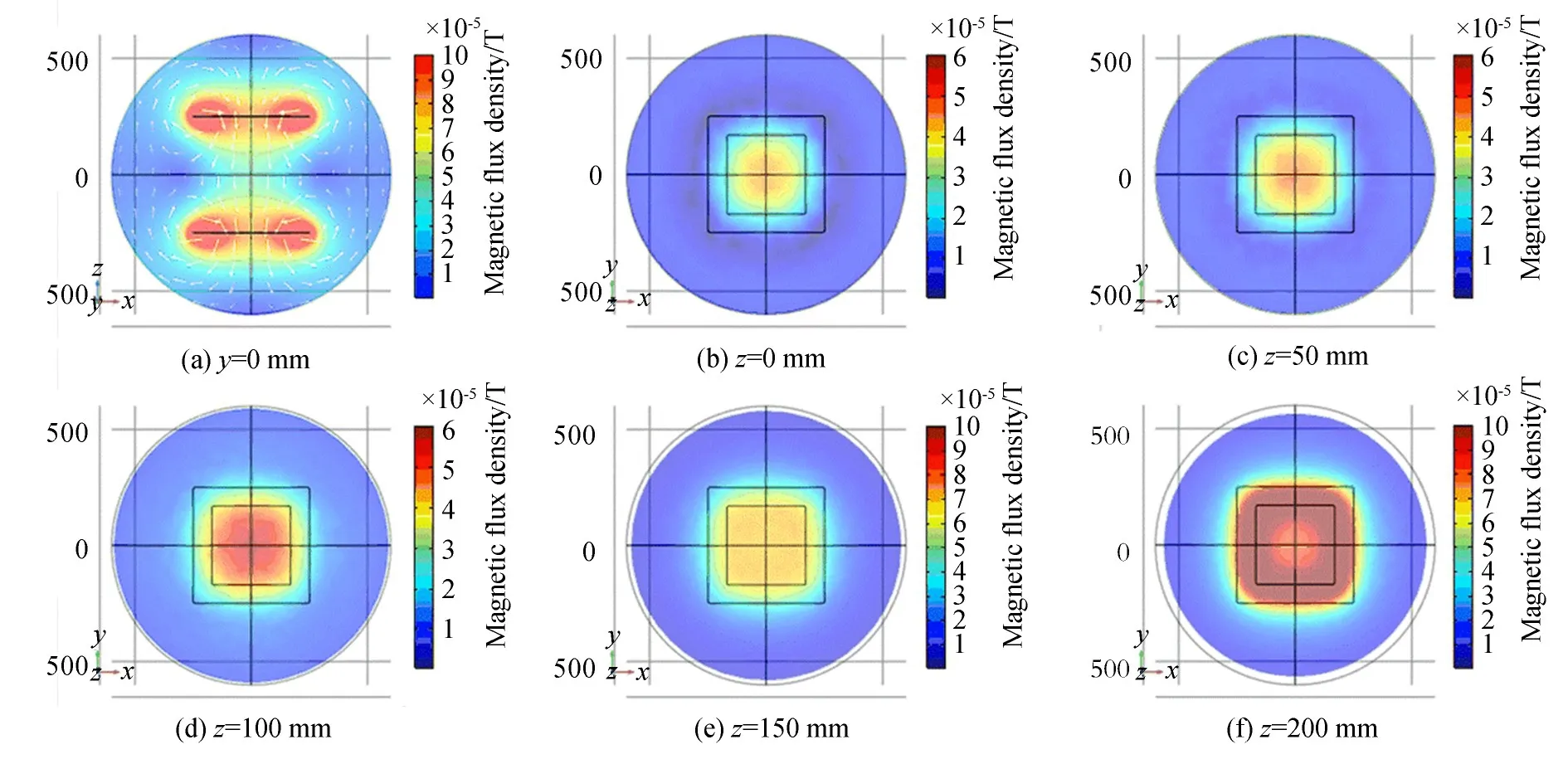
图4 线圈内部切面的磁场分布Fig.4 Magnetic field distribution in coil inner section
4 实验与分析
以500 mm×500 mm的ABS平板为骨架,利用利兹线绕制发射线圈。使用的利兹线直径为2 mm,由180股直径为0.1 mm的漆包线绞合而成,能有效减少趋肤效应导致的高频涡流损耗,减小交流电阻。绕线时由外向内,紧密绕制在平板表面,上下线圈绕线方向相同,以保证产生的交变磁场同向叠加。考虑到真实使用场景下患者身体要穿过磁场区域,因此两线圈平面的距离为500 mm。
如图5所示,由信号发生器产生120~280 kHz频率的方波信号,通过反相器产生两路相位差为180°的方波控制信号,分别控制两块半桥驱动芯片,将大功率直流电源输出的15 V直流电压逆变为峰峰值为30 V的方波,加载在线圈两端。在每个频率点调节与线圈串联的可调真空电容,通过阻抗分析仪测量,使电路发生谐振,即回路电流最大。接收端串联阻值为30Ω的固定负载电阻,替代机器人实际工作时的等效负载,线圈电压经整流、稳压电路后为负载供能。接收线圈与发射线圈参数分别如表1和表2所示。调节与接收线圈相连的可调电容,使接收线圈与发射线圈在同一频率谐振,此时负载接收电压最大。

图5 能量发射实验测试Fig.5 Test of power transmission

表1 能量发射线圈参数Tab.1 Parameters of power transmitting coil
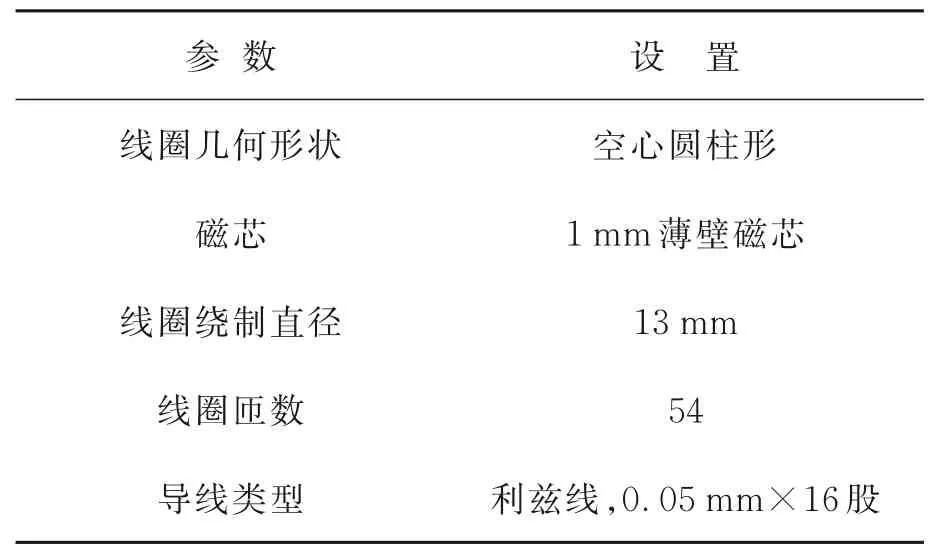
表2 能量接收线圈参数Tab.2 Parameters of power receiving coil
将接收线圈放置在发射线圈对的中心位置,两线圈中心轴重合,使互感耦合系数达到最大。以10 kHz为间隔测量负载两端接收电压与频率的关系,结果如图6(a)所示,峰值出现在200~210 kHz内。对该范围内以1 kHz为间隔加密测量,实验结果发现213 kHz时接收效率最大,将213 kHz确定为该发射线圈的最佳谐振频率。在15 V的输入电压下,发射电流为0.92 A,负载接收电压为4.86 V,接收功率为787 mW,传输效率为5.70%。

图6 不同频率下的传输效率Fig.6 Transmission efficiencies at different frequencies
调节可调电容,使发射线圈和接收线圈在213 kHz下谐振,以50 mm为间隔在内部空间取点,测量接收电压在线圈内部的空间分布,如图7所示。可以看出,接收电压的分布总体与磁场仿真结果一致。其中,在z=150 mm平面内仿真和实验结果相对其他平面更加均匀。在线圈内部中心点处,接收功率为787 mW,距离线圈平面越近,接收功率越大。在z=150 mm平面,满足650 mW以上的有效接收功率要求的范围覆盖了300 mm×300 mm的区域。由于距离两发射线圈较远,中心平面磁场衰减迅速,后续的改进方向在于通过增加磁芯或增加匝数的方法加强中心平面附近磁场的均匀性。
为了验证发射和接收线圈相对姿态对于接收效率的影响,将接收线圈放置在发射线圈对的中心,与线圈z轴倾斜30°,接收功率为675 mW,倾斜60°时,接收功率为386 mW,此时传输效率为2.80%。为了削弱姿态对于传输效率的影响,后续的改进方法在于使用三维接收线圈代替单维接收线圈。
本文设计的能量发射系统的接收功率最大可达787 mW,效率为5.70%,满足机器人的功率需求。与其他能量传输系统[13-14,16,20]的性能对比见表3。本文使用的发射线圈为薄层平板式线圈对,相比传统的螺线管对、亥姆霍兹线圈等发射线圈,轴向空间长度仅为10 mm,轴向尺寸大幅压缩,且绕线简单,性能较好。

图7 213 kHz接收电压分布Fig.7 Received voltage distribution at 213 kHz

表3 不同能量传输系统的性能对比Tab.3 Performance comparison of different WPT systems
5 结 论
本文研究了用于肠道机器人WPT系统的新型螺旋式平板发射线圈对,通过仿真分析和实验验证得到了线圈内部的磁场分布,确定了能量接收效率最大时发射系统的谐振频率,获得了最佳频率下的接收电压分布,该线圈对在中心处的功率为787 mW。本研究可为肠道机器人无线供能技术中的传输效率提高提供技术支持。