一种基于MEMS倾角测量仪的设计与验证
2021-03-23韩彦东
李 冰,韩彦东
(郑州科技学院电气工程学院,郑州 450064)
0 引言
倾角仪对倾角的测量精度要比水平仪低,其主要包括用于动态角测量的动态倾角仪和倾角不随时间发生变化的静态倾角仪,动态测量主要追求倾角仪的实时性和稳定性;静态测量主要追求倾角仪的高精度和稳定性[1-3]。
近几十年来,人们一直对研究大量程、高精度、小体积的静态倾角仪充满了高昂的热情,这是因为当今社会科技的快速推进,越来越多超高精密的仪器及设备都离不开倾角仪对其角度的测量[4],比如精度非常高的惯导系统[5]、飞速发展的智能化机器人[6]、导弹发射平台[7-8]等。而传统倾角仪无论是测量精度、体积还是其量程都已经远远不能满足对现在设备的测量[9-10],这就迫使人们急需研究出一种适用于现代社会的高精度倾角仪来解决这些问题。
随着微电子机械系统(MEMS)技术的出现和慢慢成熟,出现了采用MEMS 技术制造的倾角仪[11],其无论是制造成本还是自身的体积都比传统的倾角仪进步了很多,很长一段时间被用于航空航天、智能自动化、武器制造等高技术领域[12-13]。但是,人们发现由MEMS传感器集成的倾角仪内部结构及其微小,使用时必须经过较为复杂的误差补偿技术对其测量的数据进行去噪处理,这样才能达到对精密仪器的高精度稳定测量[14]。
本文针对倾角仪出现的需要误差补偿问题,在应用MEMS传感器的基础上设计了一种具有大量程和高精度且稳定的倾角仪系统。对系统在仪器测量过程中存在的误差进行了分析,并对误差进行了模型的建立,对其输出信号进行了放大、滤波和补偿,最后输出转化后角度。
1 倾角仪系统总体设计
1.1 系统设计
本文的设计方案是将3 个正交的MEMS 加速度传感器构成的三轴加速度传感器作为倾角模型。然后对其他部分硬件电路进行设计,系统总框图如图1所示。

图1 倾角仪系统总体框架图
从图1 可以看到,系统主要包含主控制模块、传感模块、电源模块、信号调理模块、模数转换模块、存储模块等。加速度传感器和温度传感器测量的数据首先通过信号调理和模数转换两个过程,然后再将数据配送到主控制器进行融合和解算,最后处理完的数据分别发送到存储区域和显示角度的显示屏上完成角度的实时显示。外部配套的硬件和软件分别完成对数据的快速读取和擦除以及对数据实行实时监测,一旦监测到数据出现误差会迅速向系统传达在线标定的指令。
1.2 硬件平台设计
1.2.1 传感器模块
传感器作为倾角仪中最重要的部件,其质量直接关系到倾角仪测量的精度。因此,传感器选择SDI 公司生产的型号为SDI1521 的单轴传感器芯片,具有稳定性高、噪声低的特点,其量程为±2 g,供电电压为5 V,只需5 mA的电流就可满足对其供电;内部的电压输出范围和频响分别是0.5~4.5 V 和0~400 Hz,减少了外部电路的复杂程度和噪声影响。
1.2.2 电源模块设计
本设计采用7.4 V 的锂电池为倾角测量系统供电,锂电池的高能量密度可实现系统的微小型化和实用化,除了温度传感器、控制器及存储部分采用的是3.3 V电压,其他模块都采用5 V电压为其供电,系统在电路的设计中加入了分级压降的方式,即可通过转换器根据模块对电压的需求转换成5 V或者3.3 V。
1.2.3 控制模块
系统选用的微控制器型号为STM32F405RGT6,以满足倾角仪的高精度、高实时性、小体积和低功耗等特性需求,实现如下功能:①实时对温度传感器进行控制;②控制模数转换芯片将模拟信号转换成数字信号;③对接收的数据进行实时解算,完成后分别传输到上位机和存储器;④控制FLASH 模块完成对解算后数据的实时存储。
主控制模块的控制流程如图2 所示。

图2 主控模块的控制流程图
1.2.4 信号调理及模数转换
信号调理模块经过反复对比,最后选用型号为OPA4340 的前置放大器,模数转换模块选用型号为AD7192 的芯片,其采用SPI 接口为通信口,内部包含4.92 MHz的时钟源,很大程度地降低了外部电路的复杂程度,有利于系统的微小型化。
2 倾角仪误差补偿技术
误差补偿技术是提高系统测量精度必不可少的一环,首先必须对误差源进行精准的确定,然后建立相应的模型对误差进行分析,最后根据误差模型进行控制变量法的实验以减小或消除数据中的误差。
由于传统的十二位置法对系统进行补偿时存在一系列标度因数和零点电压标定不准确问题,本文利用三轴温控转台设计了一种多位置标定补偿技术,采用多位置回程式标定完成对倾角仪系统的准确标定;然后为了提高温度的补偿精度又设计了分段式温度补偿技术,解决了温度拟合时误差较大的问题;最后设计了现场快速标定技术完成对倾角仪系统使用过程中的快速重新标定。
2.1 多位置标定补偿技术
多位置标定补偿技术通过对多位置的标定解决了传感器的滞后性误差,然后通过非线性拟合函数对安装带来的误差、标定因数和零点电压进行求解,这在很大程度上提高了倾角仪的测量精度。该方法通过三轴转台实现,当对Z 轴进行标定时,可绕X 轴以角度旋转θ,这时加速度传感器的输出为
通过对式(1)的计算可得:

式中:Uij和Kij分别表示当对i 轴的加速度传感器进行标定时,j轴传感器的电压值和标度因数;Ui0表示i 轴传感器的零点电压。
同样地,对Y 轴和X 轴加速度传感器进行标定时,可绕Z轴和Y轴旋转θ,这时三轴加速度传感器输出为:

通过对式(3)和(4)计算后可得:

通过式(2)、(5)、(6)可得g,表示重力加速度,因此3 个方程组可表示为

令U=y,sin θ=x,式(7)可简化为:
旋转角为3π/2≤θ≤2π或者0≤θ≤π/2 时,

旋转角为π/2≤θ≤3π/2 时,

式中:K1、K2、K3分别为相应的标度因数和零点电压,通过非线性拟合函数求解。
2.2 分段式温度补偿技术
虽然倾角仪的安装误差角不会随温度的不同而发生改变,但是其内部加速度的标度因数和零点电压会因温度的不同发生改变。因此必须采取相应的措施对温度进行相应的补偿以保持倾角仪无论在什么环境中都能保持较高的精度。
本文采取分段式温度补偿,将大范围的温度隔开成若干小范围温度,然后对每小段进行温度补偿。在每段中,对传感器进行最高温和最低温的标定,分别计算出标度因数和电压零点,然后利用温度分别对标度因数和电压零点进行线性拟合,得:

式中:K(T)、U0(T)、TH及TL分别表示加速度传感器在温度T时的标度因数、零点电压、最高最低温度;在温度最高和最低点测得的标度因数和电压零点用KH、U0H和KL、U0L表示。按照式(8)可同样计算出其他段的标度因数和零点电压。这样就利用分段式温度补偿的方法实现了倾角仪内加速度的温度补偿,具有精度和实时性高的特点。
2.3 现场快速标定技术
针对倾角仪内加速度的零点电压和标度因数会随时间的增长而发生漂移,本文设计了可对倾角仪实现现场快速且高精度的校准技术,主要通过模拟三轴温控转台位置的控制来完成。由于实验在外场进行,无法用到三轴温控转台。此时,将倾角看作平面,然后输入1g、0g、-1g、0g 4 个值,绕Z 轴旋转完成对X 轴加速度传感器的标定,标定示意图如图3 所示。
图3 中将由XaYaZa和XbYbZb组成的坐标系分别称为a系和b系,假定倾角仪处于平面与实际平面的夹角为δ;b系的X轴和Y轴和a系中的X轴夹角分别用θxx、θxy表示。X轴的标度因数和零点电压,

可以得到δ角的大小对倾角仪的标定不会产生任何影响,只要在标定过程中时刻保持δ角的大小即可。
对Y和Z轴传感器的标定用同样的方法,完成标定后就可得到3 个轴上的加速度传感器的标度因数和零点电压。

图3 主控模块工作流程图
3 系统验证
3.1 多位置标定补偿技术验证
本文主要以传统的十二位置法标定效果为对比来验证提出的多位置标定技术的先进性与实用性。因此利用两个倾角仪分别采用不同的标定方法进行标定,然后对比标定后的标度因数、零点电压和及安装误差系数。设计制作的倾角仪实物如图4(a)所示,用来标定的转台如图4(b)所示。
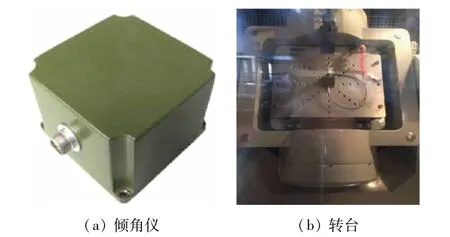
图4 倾角仪实物图与转台标定图
将本文制造的两个具有高精度的倾角仪放置标定转台的里框水平面上,然后将电源及各个接口连接,一切准备就绪后开启软件进行三轴加速度传感器的标定。分别采用传统十二位置法和多位置标定法绕Z、X、Y对X、Y、Z轴加速度传感器进行标定,三轴加速度传感器的标定对比如图5 所示。
从图5 可以看出,通过传统十二位置法对倾角仪进行安装误差角补偿时,其对加速度传感器的误差可达±1 mg,对应的角度误差为0.05°,这对倾角仪的测量精度有很大的影响。相反地,利用多位置法对倾角仪进行角度补偿后基本可以消除安装误差角对倾角仪带来的影响。

图5 标定结果对比图(其中g为加速度值)
为了更进一步确定多位置法对倾角仪的标定精度,通过转台将倾角仪分别转至90°和270°位置上(因为这两个位置的理论误差最大),然后测量倾角仪的误差及分辨率。测量完这两个位置后再对其附近的角度进行测量对比。倾角仪经过多位置法标定后的原始输出如图6 所示。从图可看出,倾角仪的测量误差及分辨率都低于0.01°。

图6 倾角仪的原始数输出
3.2 分段式温度补偿技术验证
本文采用多位置标定法补偿后的倾角仪完成对分段式温度(-20~60 ℃,每10 ℃分1 段)补偿技术的验证。首先得到倾角仪通过温度补偿的关系式,然后在控制芯片的误差补偿算法中加入参数,最后确保温度从-20 ℃上升至60 ℃,标度因数和零点电压随温度的变化图如图7 所示。由图可看出,传感器的标度因数随着温度的升高而减小,零点电压随温度的升高增大了20 mV,这将会大大降低倾角仪的测量精度。因此对倾角仪进行温度补偿必不可少。

图7 标度因数与零点电压趋势图
当温度分别为90°和270°时,倾角仪补偿前后的均方根误差值与真实值的和如图8 所示。由图可明显看出,倾角仪在温度补偿前的测量误差为±0.1°,并且随着温度的升高测量精度出现大范围降低,而温度补偿后的倾角仪无论在90°还是在270°,其测量误差均低于±0.01°。

图8 误差对比图
3.3 现场快速标定技术验证
将上电的倾角仪放置于较平的水平面上,然后在PC端向倾角仪发送自标定的命令。然后分别绕Z、X、Y轴每次旋转90°,共旋转4 个位置,在每个位置每次停留10 s,最后根据存储的加速度传感器的输出电压判定3 个加速度是否正处于同一位置。本次测试选用的倾角仪配置相同且都经过长期使用导致测量精度降低,其中一个通过转台进行多位置法标定,另一个通过现场快速标定法进行标定。标定完成后将两个倾角仪放置于同一个转台上进行精度的对比测试。
测试结果如图9 所示,倾角仪经过多位置法标定后的误差在±0.01°内,而通过现场快速标定法标定后的倾角仪的误差为±0.01°左右,同样具有非常高的标定精度,在缺少转台的外场实验中利用现场快速标定法具有非常强的可行性。
4 结语

图9 标定结果对比图
本文针对目前市场上对小型化、高精度倾角仪的迫切需求,采用线性电源、高频控制芯片及高分辨率模数转换芯片设计并制造了具有大量程高精度的倾角仪。然后对倾角仪测量时的测量误差通过建模提出了多位置标定补偿技术、分段式温度补偿技术及现场快速标定技术。最后通过三轴温控转台对提出的3 种标定方法进行了实验验证,证明了3 种标定技术对倾角仪的标定精度均可达0.01°,经过标定后的倾角仪不但具有高精度,而且可实现对精密仪器的大范围倾角测量。
