基于自组网的机车近距离无线重联控制系统研究
2021-03-22邓亚波徐富宏
邓亚波,林 磊,徐富宏
(株洲中车时代电气股份有限公司,湖南 株洲 412001)
0 引言
随着铁路运输的不断发展,在铁路干线电力牵引运行中,单台机车牵引运力往往不能满足运输的要求,因此需要采用多机牵引的方式完成运输任务[1]。多机牵引模式分为远距离(如1+1、2+2等)和近距离(2+0、3+0等)两种模式[2-3]。其中近距离模式普遍采用硬线重联编组的方式(如WTB硬线重联),运用过程中存在人工摘挂效率低、易引发人身安全事故、带宽有限、在需经常插拔的运用场景下可靠性低等问题。近年也有采用WiFi技术的机车近距离无线重联控制系统装车试用,但为了保证系统冗余性,需增加成倍设备,有待优化升级。
自组网技术具有自组织、去中心化、多跳、自感知及自决策[4]等特点。美国的先进战术通信系统(Ad Hoc)作为自组网的原型,早已成为美国军用电台的必备功能。2000年,Ad Hoc技术转为民用,又称之为Mesh技术。2006年IEEE发布了802.11SMesh标准。目前自组网技术在公安执法、森林防火、抢险救灾、军队演练、反恐特勤、地下作业等领域有着广泛的应用,也在轨道交通的应急通信等领域开始测试及应用[5]。本文基于自组网技术设计了一套机车近距离无线重联控制系统,以便在不增加设备的同时,进一步提高机车近距离无线重联控制系统的冗余性,同时提高系统的抗干扰性。
1 机车无线重联
以HXD1C型电力机车为例,单台机车的网络拓扑架构如图1所示。单台机车运行时,机车操控指令主要由网络控制系统的数字量输入输出模块(DXM)、模拟量输入输出模块(AXM)等进行采集,经车辆控制模块(VCM)逻辑处理后发送给牵引控制单元(TCU)及制动控制单元(BCU)等执行;各动作单元的状态信息也被反馈至VCM模块,并通过显示器(IDU)为乘务员提供机车运行状态信息显示。
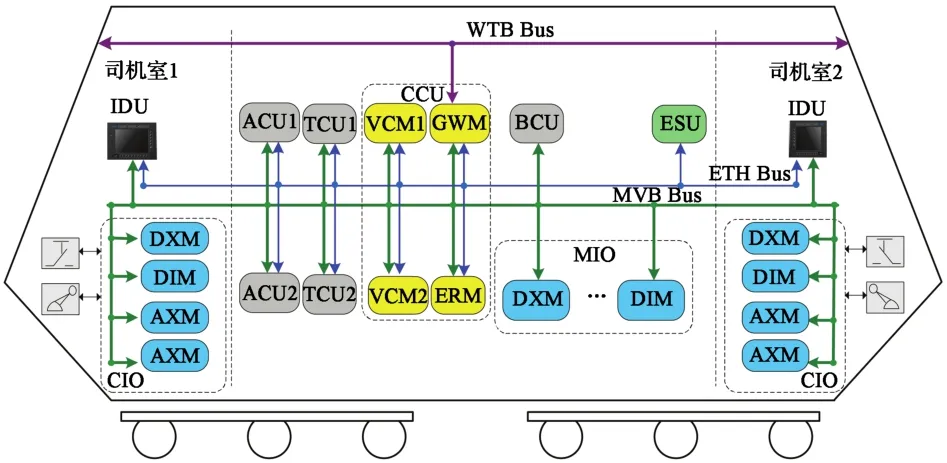
图1 单台六轴电力机车的网络拓扑Fig.1 Network topology of a six-axis electric locomotive
关于多台机车重联运行,国际标准IEC TR 61375-2-7(Edition 1.0 2014-04)Electronicrailway equipment-Traincommunicationnetwork(TCN)-Part2-7:WirelessTrainBackbone定义了列车通信网络的3种主干网(WTB, ETB, WLTB),通过主干网可实现轨道交通领域通用的开式列车中各个车辆的协同操作[6]。图2示出基于IEC 61375标准的列车通信主干网框架。
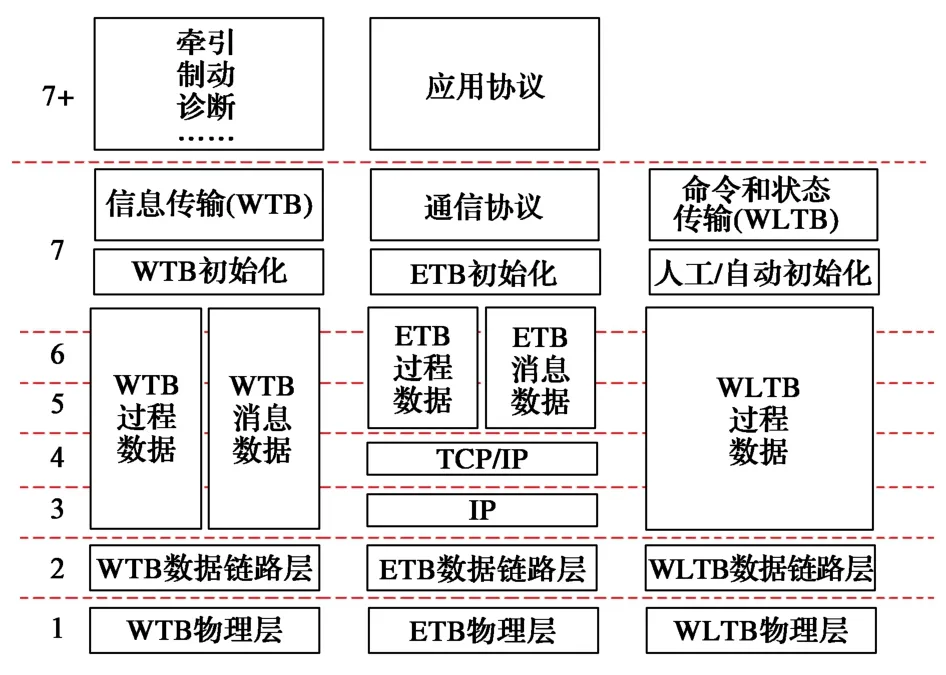
图2 列车通信主干网Fig.2 Train communication backbone network
无线通信方式下的列车通信网络应用场景为无线列车骨干网(WLTB),主要解决列车自身不能通过有线方式实现重联、改造成本有限、车辆组成长度超过有线方式的最大允许长度或列车间需要灵活编组等问题。如配备LocotrolDP或RDP系统的牵引机车,采用电台、GSM-R及LTE专网等无线通信方式,实现分布式动力系统操控命令和状态数据的传输,或直接相连的多台机车利用WiFi等无线通信方式实现同步操控列车等。
当两台机车重联运行时,需要传输的信号主要有两大类,分别是WTB级通信数据和硬线信号(包括紧急制动、撒砂指令和重联电话等),其中,WTB级通信数据包括列车级的传输控制指令、各机车的动作单元的状态反馈信息等。采取以下措施实现上述两类信号的传输:
(1)原来通过WTB总线的A线和B线进行冗余传输的重联机车之间的控制指令和反馈状态信息,由网络控制系统发送给无线重联控制系统,再经过无线通道进行传输,如图3所示。

图3 六轴电力机车无线重联网络拓扑Fig.3 Network topology of the wireless coupling control system for six-axis electric locomotive
(2)利用原有网络控制系统的预留通道,增加机车紧急制动指令和撒砂指令的冗余采集;然后通过无线重联控制系统,把紧急制动指令和撒砂指令冗余传输到重联的机车,再由重联机车的机车网络控制系统触发机车紧急制动和撒砂等动作。
(3)无线重联控制系统增加语音网关功能,机车主叫端电话的语音信号经数字化处理和压缩编码打包后再通过无线通道进行传输;机车受话端电话收到解压解编还原的语音信号,实现重联机车间的通话功能。
(4)为保证无线通信传输的可靠性,采用双无线通信单元构建重联机车间的无线传输通道。
上述措施对WTB通信信号、关键指令数字信号、重联电话的数据传输和控制无影响,可以支持多台机车以无线重联方式运行。
2 无线通信方式
无线通信方式是机车近距离无线重联控制系统的重要环节。对于已应用的WiFi技术方案,为了保证系统的冗余性,需增加成倍设备,本文尝试用自组网技术方案进行优化。
表1示出Mesh自组网、WiFi、蓝牙、Zigbee、无线激光通信(FSO)及5G毫米波等无线通信方式对比。由表1可知,WiFi具有接入灵活、安装便捷、易于扩展、满足移动应用等优点,广泛用于地铁综合承载、数据传输下载等。蓝牙支持设备短距离通信(一般10 m内),具有传输效率高、安全性高等优势,主要用来实现城市轨道交通的室内定位、导航、过闸等。ZigBee技术具有高效、便捷的特征,适用于数据流量偏小的业务,在PC外设、消费类电子设备、家用智能控制、玩具、医护、工控等领域有应用,在地铁环境监测、设备监测中也有初步应用。FSO具有容量大、速率高、抗干扰强、频谱自由等优点,但要求通信设备之间有着较为精准的对位关系,且受环境因素(如暴雪、沙尘暴等)影响较大。5G毫米波通过大规模天线阵列与各种多址复用技术,极大提升信道容量,适用于高速多媒体传输业务,已开始在机车、地铁列车的大容量数据转储等场景得到应用,效果较好。这几种无线通信技术,除WiFi外,都不太适合机车近距离无线重联运用场景。

表1 无线通信方式对比Tab.1 Comparison of wireless communication modes
相比于上述无线通信技术,自组网技术的独特性能有[4]:
(1)自组织。无须人工干预或其他网络设施即可实现自动组网。
(2)去中心化。自组网为对等式网络,所有节点地位平等,无严格意义的控制中心,逻辑主可按需切换。各节点能够随时加入和离开网络,单节点的故障不会影响整个网络的运行。
(3)多跳。当终端要与覆盖范围之外的终端进行通信时,需要利用中间节点(终端)进行转发,终端具备路由功能。
(4)自感知。各节点可感知网络内、外部环境,其中外部环境包括电磁环境、气候环境等,内部环境包括网络成员数量、网络拓扑、路由、信道资源等。各节点感知信息网内共享。
(5)自决策。各节点根据自感知的环境变化情况及需要来选择最优策略(业务服务质量QoS策略、路由策略、频点切换策略、资源分配策略等),并自动配置网络。
自组网网络节点兼有路由功能、支持自动组网功能(最大可支持31跳路由、32个用户),可以灵活地建立机车之间的无线通信网络,故本文特选用自组网模块设计机车近距离无线重联控制系统。即使系统的单个无线通信模块发生故障,无线通信网络也能自行愈合,从而保证无线数据传输的可靠性;同时依据应用需求,将可用频段划分为合适带宽的多个独立信道,并选择信噪比(SNR)和信道质量指示(CQI)更优的信道进行通信,进一步提升系统的抗干扰性能,保障多机车牵引列车的安全平稳运行。
3 基于自组网的机车近距离无线重联控制系统
3.1 系统组成
基于自组网技术的机车近距离无线重联控制系统包括重联控制单元、无线通信单元(自组网模块)、语音网关、交换机、天线及馈线等,如图4所示。若原机车网络控制系统已包含交换机且有足够预留接口,则可以通过在原有机车上增加一套无线重联控制系统来实现机车原有硬线重联功能,将有线通信转换为无线通信,而无须新增交换机。系统方案分为两级,第一级为列车级,第二级为机车车辆级。列车级采用自组网方式,通过无线通信单元来实现,不需要地面通信补强设备。第二级基本保持现有系统结构,只需在现有的MVB网络或机车电气系统中增加重联控制单元(MCU)、语音网关等设备即可。
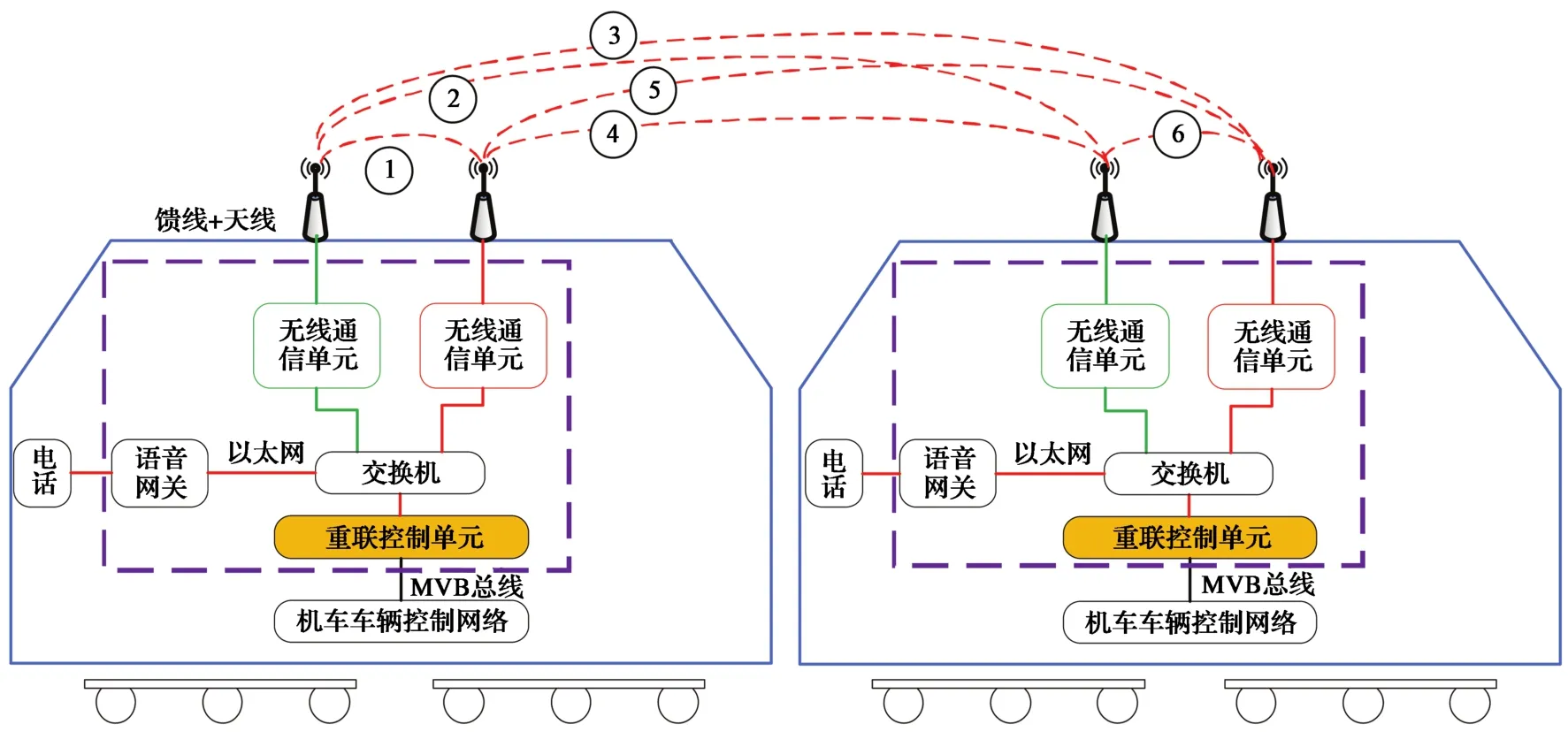
图4 基于自组网的机车无线重联网络拓扑Fig.4 Network topology of the locomotive wireless coupling control system based on Ad Hoc network technology
重联控制单元主要功能包括:
(1)重联控制单元通过机车车辆总线接口(如MVB)接入机车车辆控制网络。其中主控车重联控制单元主要从机车车辆控制网络获取操作指令,从控车重联控制单元主要将收到的操作指令传送给机车车辆控制网络。
(2)主控车重联控制单元通过机车车辆原有的交换机接收无线通信单元的机车车辆编组信息,选择所需的机车车辆,完成编组确认。
(3)通过编组后建立的无线通道,主控车重联控制单元可以将操作指令传送给从控车重联控制单元,从而实现主控车与从控车的同步控制。
(4)从控车重联控制单元将本车的运行状态、故障事件等信息传送给主控车重联控制单元,并显示给乘务员。
无线通信单元主要功能包括:监测临近的机车车辆无线通信单元信息并提供给重联控制单元进行编组决策;依据应用需求,将可用频段划分为合适带宽的多个独立信道;无线通信单元实时监测CQI和SNR,一旦判断出性能恶化,立即进行跳频。
语音网关主要用于语音信号的数字化处理、压缩编码打包以及解压和还原语音信号。将机车主叫端(如主控车)电话的语音信号进行数字化处理、压缩编码打包,再通过交换机、无线通信单元进行传输,机车受话端(如从控车)的语音网关接收到数据后,进行解压并把数字信号还原成语音信号,实现重联机车间的通话功能。
3.2 自组网流程与策略
无线通信单元是建立自组网的核心模块,每台车设2个无线通信单元。建立好的自组网无严格的控制中心,单个无线通信单元故障后,该节点自动退出,不影响整列车无线通信网络。每个无线通信单元兼有路由器和主机两种功能,支持数据转发。
3.2.1 主从节点确认
机车重联运用过程中,主控车需合电钥匙,从控车不需合电钥匙。主控车重联控制单元采集到该信号后,通知位于同一机车车辆内默认的1个无线通信单元并将其自动配置为逻辑主无线通信单元。未收到该信号的主控车的另1个无线通信单元和从控车的无线通信单元均被自动配置为逻辑从无线通信单元。
主控车重联控制单元同时采集本主控车的机车号、待编组从控机车的机车号以备用(乘务员可通过显示器相应界面进行录入)。
3.2.2 信道设置
依据编组机车车辆数量、传输数据带宽等应用需求,将可用频段划分为合适带宽的多个独立信道。
信道自定义设置示意如图5所示。如可用频段总带宽为80 MHz,若10 MHz带宽可以满足应用需求,则可以设置成完全隔离的5个独立信道;如果更窄的带宽(如5 MHz)也能满足应用需求,则可以设置更多的完全隔离的独立信道。
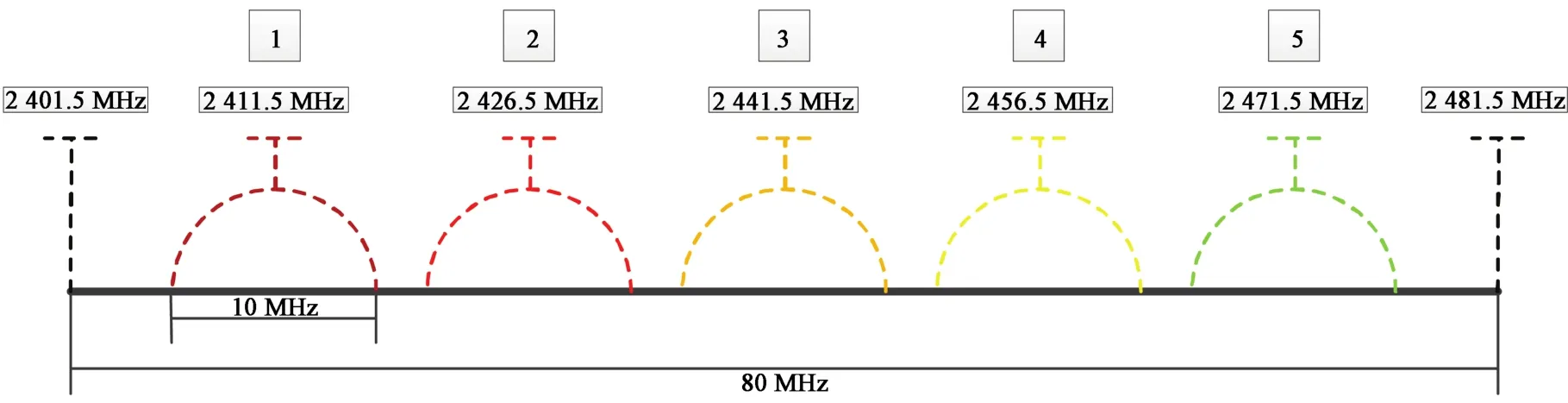
图5 信道自定义设置Fig.5 Channel custom settings
3.2.3 自组网建立
逻辑主无线通信单元配置成功后,通过扫频选择干净的信道进行自组网的建立。组网时优先选用默认信道,如检测到该默认信道已经被确认好的无线重联组网所占用,或者该默认信道的CQI不佳,无法承载业务,则启用自动跳频功能,选用下一信道。
信道选定后,逻辑主无线通信单元将自动发送同步信息(包含选用的信道、主控车机车号、从控车机车号等),以便该自组网其他节点收到后及时接入。
逻辑从无线通信单元配置完成后便直接作为接入节点,采用轮询方式收集不同信道的同步信息。当收到的同步信息包含主控车机车号或从控车机车号时,确认该同步信号适配自己,按同步信息配置自身的使用信道,建立与逻辑主无线通信单元的无线连接通道。
当所有从无线通信单元均与逻辑主无线通信单元的无线连接通道建立完成后,该自组网建立完成。
3.2.4 自动跳频策略
系统运行过程中,逻辑从无线通信单元持续监测CQI和SNR,并反馈给逻辑主无线通信单元。
逻辑主无线通信单元监测自身的CQI和SNR,并接收逻辑从无线通信单元发送的CQI和SNR。一旦判断其性能无法承载业务,即生成跳频列表,并通知逻辑从无线通信单元,按预设跳频周期,重新选择新的信道并工作。
若所有信道性能都不理想,则选择性能相对较好的信道工作。当其他信道有改善后,再切换到其他信道工作。
3.2.5 通信中断策略
当无线通信信道被干扰或因其他因素导致某节点与自组网通信中断时,原来需通过该节点传输的数据将通过相邻节点进行转发;该通信中断的节点也会不断尝试搜索,直至重新接入网络。
3.3 系统功能
(1)自组网建立。初始化各无线通信模块后,逻辑主无线通信单元发送同步信息,逻辑从无线通信单元收到适配的同步信息后完成自己的信道设置,并与逻辑主无线通信单元建立无线通信链路,最终完成机车无线通信模块的自组网建立。
(2)编组与解编。自组网建立完成后,系统通过显示器提示司机再次核对相应机车,并确认是否进行编组[7]。司机通过显示器界面相应的按键可以进入无线重联主界面。在无线重联主界面具备“编组解编”和“无线拓扑”界面。通过“编组解编”界面的按键可进行机车链接与断开操作;“无线拓扑”界面显示机车间无线拓扑情况,如某设备故障,可通过本界面进行故障提示。
(3)数据传输。通过无线重联控制系统,主控车可向从控车传输司机操作命令、故障诊断信息、语音数字信息等,从控车也可向主控车反馈从控车状态信息、故障诊断信息、语音数字信息等。
(4)无线管理。无线重联控制系统能够接收无线通信单元的CQI和SNR等参数,并能协调和同步设置信道参数,优化无线通信质量。
(5)数据记录。无线重联控制系统能记录重联机车车型车号、运行方向、信号强度、连接状态等关键信息。
(6)通信状态判断。无线重联控制系统能够通过数据通信中断的时间间隔来判断无线重联的通信状态,间隔10 s以内为通信正常(绿色)、10~15 s为通信预警(黄色)、15 s以上为通信中断(红色)。
(7)系统故障安全导向。当重联机车的无线重联控制系统发生设备故障,导致系统不能通过无线通道传输数据时,则在无线通信中断开始的10 s内,从控车将继续维持通信中断前的运行状态;若无线通信中断持续,则从第10 s开始,从控车按设定下降曲线逐步卸载(斜率为45 kN/s),牵引/电制力逐步降为零,到第15 s完成卸载。若此段时间内通信恢复正常,则主、从控机车恢复编组模式运行,从控车按照收到的有效指令控制牵引/电制力逐渐上升至收到的设定值。若通信一直未恢复正常,则从控车在第15 s完成卸载后,开始跳主断与自动降弓,主、从控机车均转到单机运行模式运行;若此后,通信恢复正常,则主、从控机车恢复编组模式。主控车乘务员需断主断、降弓后,再重新升弓与合主断,从控车才能按照收到的有效指令同步升弓与合主断,并继续响应主控车的其他操作指令。
3.4 系统实施
目前,该基于自组网模块的机车近距离无线重联控制系统已进行了实验室系统搭建和测试,并与基于WiFi模块的系统进行了实验室的测试对比。
3.4.1 系统冗余和复杂度对比
当机车近距离无线重联控制系统采用基于WiFi模块的无线通信单元技术方案时,由于一个无线通信模块同一时间只能连接1个无线通信模块,若要保证无线通信模块和无线通道冗余且能支持2台以上的机车重联运行,则每台机车最少需安装4个无线通信模块,且交换机也至少需要2个。本文提出的基于自组网模块的机车近距离无线重联控制系统采用了图4的技术方案,只需2个无线通信单元和1个交换机,即可在保证无线通信单元和无线通道双冗余的同时,支持2台以上的机车通过无线通信方式进行重联运用。表2为两种方案所需设备的对比。
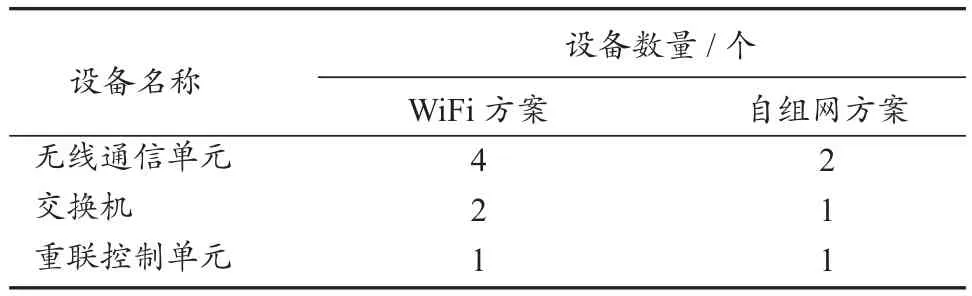
表2 机车近距离无线重联系统(支持机车重联数≥2)所需设备对比Tab.2 Comparison of required equipments for short distance wireless coupling control system (Number of the connected locomotives is not less than 2)
3.4.2 通信测试
在实验室,基于WiFi的无线通信模块(BAT450-F)[8]和基于自组网的CX5701-RW模块[9]分别搭建机车近距离无线重联控制系统并进行测试,结果如表3所示。

表3 近距离无线重联系统通信测试结果Tab.3 Results of communication test for the short distance wireless coupling control system
从测试结果可以看出:
(1)在发射场强相当的情况下,采用CX5701-RW模块的系统可以通过自动跳频选择干扰更小的信道进行通信,比采用BAT540-F模块时系统的信噪比约高5 dB;
(2)传输相同的数据时,采用BAT450-F模块的系统丢包率为0.029 2 %,而采用CX5701-RW模块的系统丢包率为0.010 9 %,后者抗干扰能力更强;
(3)BAT450-F模块的设计带宽为450 Mb/s,CX5701-RW模块的设计带宽只有30 Mb/s,因此在现阶段WiFi技术方案更能适应有视频传输等需求的应用场景。
4 结语
本文通过设计一种机车近距离无线重联控制系统,实现了原WTB总线数据、关键硬线信号、语音信号的无线传输;同时基于Mesh自组网技术的自组织、自愈合、信道自定义、自动跳频等技术,可以在不增加设备的前提下,进一步提高机车近距离无线重联控制系统的冗余性,同时也提升了系统的抗干扰性能。但目前自组网模块的设计传输带宽为30 Mb/s,仅在对带宽要求不是很高的场景能够获得应用。随着自组网通信技术的进一步发展,高于100 Mb/s的自组网模块产品也将很快面世,有望在更多的场景获得应用。