基于增益调度法的倾转旋翼控制系统设计
2021-03-21宋晓东
宋晓东,吴 斌,桑 涛
(北京理工大学宇航学院,北京 100081)
0 引言
随着科学技术的发展,无人机被广泛应用于各个领域。相比于载人机,无人机具有成本低、体积小、研制周期短等优势,更加适合小范围的勘测、侦察等任务。旋翼无人机能够随时随地起降,完成一些近距离、低速任务;虽然固定翼无人机在长远距离工作效率更高,但无法长时间、最低巡航速度以下正常工作。因此,具备垂直起降功能的无人机应运而生。
为实现倾转旋翼无人机多种飞行模态,对其控制系统设计提出了更高的要求。尤其在过渡过程,起始阶段和末尾阶段力学特性不同。以垂直起飞为例,倾转旋翼机在起始阶段通过螺旋桨拉力克服重力;在合适的前向速度下,短舱开始倾转,随着速度的上升,机翼气动力逐渐起主导作用,最终达到机翼升力克服重力,螺旋桨拉力克服阻力的巡航状态。模态转变过程中,无人机具有强烈的非线性特性,传统的线性控制器无法满足控制需求;在进行垂直起降时,由于飞行器的弹道倾角在90°时存在奇异点问题[1],给控制系统设计带来了一定的难度。国内外学者对此提出了多种控制方案。文献[2]采用新型自抗扰滑模控制算法,设计了内外部干扰观测器,将模型误差和耦合视为干扰进行补偿控制;文献[3]提出了一种基于模糊控制的倾转控制方法,使倾转旋翼无人机能够实现平稳过渡飞行;文献[4]采用了非线性动态逆设计了全包线飞行控制率。文献[5]采用了BP神经网络对PID参数进行调整从而满足控制需求,目前这种方法工程应用难度大,并且依赖于可靠的数据收集。文献[6]在研究垂直起降控制器验证过程中,为了避开奇异点问题,设计的航迹也并非真正意义上的垂直于水平面,而是前向有一定的倾角。
文中对倾转四旋翼飞机进行建模,建立了跟随旋翼倾转的短舱坐标系;采用了增益调度的方法,将短舱倾角作为调参变量,将倾角分为多个工作点,实现了对倾转旋翼机过渡过程中高度的稳定控制,使其平稳过渡。同时采用误差四元数方法进行姿态控制,避免了垂直起降过程中欧拉方程出现的奇异点问题。
1 倾转旋翼机模型
1.1 布局设计
研究对象采用常规气动布局[7]。动力采用4点式动力布局,飞机布局和倾转机构如图1和图2所示。

图1 倾转机构

图2 飞机布局
倾转旋翼无人机在垂直起降模式飞行时,通过4个电机的差动进行姿态控制,与四旋翼无人机控制方案相同。在过渡飞行模式中,机体纵向平面z轴方向上,既存在螺旋桨拉力在垂直方向的分力,也存在机翼的气动升力。巡航模式时旋翼产生的拉力用于克服阻力。
倾转旋翼机基本参数如表1所示。考虑前后翼干扰问题、发动机干扰效应,进行空气动力学分析,通过DATCOM气动估算、CFD分析修正,确保气动参数具有一定的可信度。

表1 倾转旋翼机基本参数
1.2 数学模型
首先定义固连于电机的短舱坐标系Ot,如图3所示,其原点与机体坐标系重合,该坐标系随电机倾转而绕其y轴旋转。倾转旋翼机在悬停状态,定义短舱坐标系x轴方向与机体x轴同向,y轴方向与机体轴y轴方向相同[8]。

图3 短舱坐标系
建立无人机空间六自由度模型:
(1)
(2)
(3)

(4)

(5)
作用在无人机上的力主要包含动力Fmotor,t,动力矩Mmotor,t[9]。
(6)
(7)
式中:下标t代表短舱坐标系;T为电机推力,下标1、2、3、4为电机序号。
气动力和气动力矩为:
(8)
Maero,t=
(9)

2 控制系统
倾转旋翼机从垂直起飞到巡航的转换是一个具有强烈非线性特性的过程[10]。文中在高度控制中,采用增益调度方法。其基本思想是在整个飞行包线内,将模型分为多个平衡工作点,每个平衡点处通过小扰动线性化方法得到线性模型,每个平衡点处设计线性控制器,最后利用插值拟合的方法使其成为参数可变的全局控制器。如图4所示,内环所需的期望倾转角度和期望高度由外环制导回路产生。

图4 控制系统
2.1 高度控制
在垂直起降转换到平飞过程中,短舱坐标系与机体坐标系的夹角从 转换至 。根据增益调度法的原理,将该过程每间隔5°选取一个平衡点。每个平衡点对应一个倾转角度δd,n,根据倾转旋翼机在平衡点处受力和力矩平衡,可推导出:
(10)
(11)
式中:Tx0和tz0为平衡状态时,机体坐标系下推力沿x轴和z轴方向的分量;vx0为平衡速度;δd,n为第n个平衡点的期望倾转角。
根据式(11)即可得到所有工作点达到平衡状态所需要的水平速度和推力大小。通过Matlab计算各个工作点平衡状态如图5所示。

图5 水平速度、推力与倾转角度关系

(12)


(13)
式中:ΔTx和ΔTz为机体坐标系下发动机推力增量沿x轴和y轴方向的分量;δvert为升降舵面的偏转角。
定理1 若线性定常系统{A,B}的可控矩阵
Sc=[BABA2B…An-1B]
(14)
则系统状态完全可控的充要条件是该可控矩阵满秩,即rankSc=n。
根据定理1可以证明该系统在-90°≤δd<0时满秩,完全可控。在0°时,由于前向速度较低,升降舵面不足以产生足够的控制力矩。根据爬升速度和高度误差设计高度控制器,同时对前向速度进行控制,设计状态反馈矩阵为:
(15)
式中,kvx(δd,n),kvz(δd,n),kz(δd,n),kδvert,vz(δd,n),kδvert,z(δd,n)∈R>0为增益系数。以δd,n为调度变量,通过Matlab对该系统每个工作点进行极点配置,得到每个参数的增益调度表。通过仿真试验,将极点配置在-4附近时系统具有较好的动态特性,得到的增益调度关系曲线如图6至图10所示。

图6 kvx与倾转角度关系

图7 kvz与倾转角度关系

图8 kz与倾转角度关系
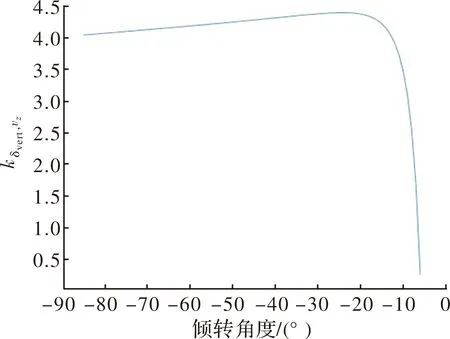
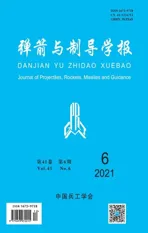
图9 kδvert,vz与倾转角度关系
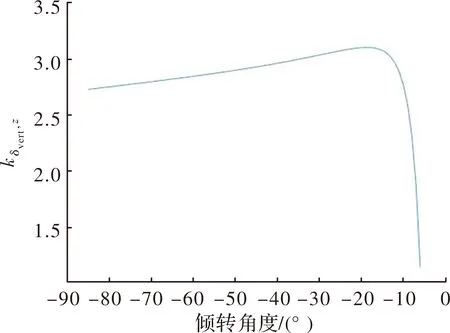
图10 kδvert,z与倾转角度关系
通过对5个参数计算结果简单分析,可直观地判断其合理性。图6为参数kvx增益调度关系曲线,该参数通过机体轴向速度误差控制轴向的推力。在期望速度下,阻力大小与速度平方成线性关系,忽略模态转换对阻力特性造成的影响时,系统的阻力变化较小,因此该参数变化范围也较小。图7和图8为kvz和kz增益调度关系曲线,根据式(15)可知,通过PD型控制器对z轴方向推力分量进行控制。当倾转旋翼机垂直起降时,气动升力接近0,此时该参数数值较大以满足推力控制需求。图9和图10为kδvert,vz和kδvert,z增益调度关系曲线,由图可知,在-15°左右该参数急剧下降,原因是在0°~-15°范围内,倾转旋翼机的巡航速度较小,气动舵面效率低。当达到-15°倾转角后,气动舵面开始发挥主要操纵作用,并随着速度升高,舵效增强,参数变小以减少系统的超调量。实际使用时,该增益调度表通过地面计算,在线查表的方式,大大地降低了飞控系统计算量。
由于计算时忽略了舵面等因素对平衡速度的影响,并且真实阻力系数与气动估算得到的系数存在偏差,在实际飞行控制中,倾转旋翼机在各个平衡点的期望速度与计算值有一定偏差。当以期望速度飞行不足以提供足够升力时,高度降低,导致下沉,vz变大。可通过对过程中工作点的水平平衡速度进行更新解决该问题,设计更新律为:
(16)
其中σ∈R>0为自适应增益。
2.2 姿态控制
在高度控制系统中,通过升降舵面对俯仰角进行控制,从而控制飞行器的高度变化。因此姿态控制中只再解决滚转和偏航两个方向的控制问题。当倾转旋翼机的电机从0°倾转至-90°时,飞机进入巡航状态,同时也导致状态方程中欧拉角度出现奇点[11]。因此,文中基于四元数法设计姿态控制器,避免了奇点问题。由于四元数直接表示姿态具有双值性,即正负均可表示同一姿态角,因此在控制系统中采用姿态误差四元数方法。该方法实质上是将用于表征姿态的四元数旋转至期望姿态下的四元数。定义基于短舱坐标系的四元数:
(17)
式中:ηt为四元数标量部分;qt为向量部分。垂直起飞转换至巡航模式时,倾转机构由0°转换至-90°。定义期望姿态四元数Qd=[ηdqd]T。
根据四元数的计算方法,误差四元数可表示为:
Qe=Qe(ηe,qe)=Qd(ηt,qt)Qd(-ηd,qd)
(18)
(19)
(20)
式中:下标e表示差值;下标d表示期望值;上标×代表向量叉积,表达形式为:
(21)
角速度四元数可以用短舱坐标系Ot旋转至期望坐标系Od来表示,即
(22)
根据式(4),可得到基于四元数的动力学模型为:
(23)
(24)
(25)
其中:μ为旋翼产生的控制力矩;d为除了旋翼产生的控制力矩以外的力矩。式(23)~式(25)描述了基于短舱坐标系的姿态四元数旋转至期望四元数的过程。倾转前后机构的变化导致系统惯量I的不确定性增强,为了消除I项的误差[12],定义:
Iα=J(α)Γ
(26)
其中Γ=[I11I22I33I23I13I12]T,α∈R3×1,J(α)为关于α的转换算子,其表达式为:
(27)
将Γ代入式(23)中得到:
(28)

(29)
设计姿态控制器的输出量μ的表达式为:
(30)
式中:k1,k2>0;K1,K2为对称正定矩阵,积分项用于补偿d,下面分析系统的稳定性。
选取李雅普诺夫函数为:
(31)
对式(31)进行求导得到:
(32)
进一步求解,得到:
(33)

3 实验验证
所设计的验证模型机质量为5 kg,巡航攻角设计为3°。控制芯片采用Cortex-A9,惯导系统采用L3GD20H角速率传感器、LSM303D加速度计和磁航向计,其他航电为GPS和压差空速计。
设计航迹为在机体坐标系(x,y,z)=(0,0,0)处垂直起飞至30 m高度,再沿着(x,y,z)=(210 m,0 m,30 m)、(210 m,410 m,30 m)、(0 m,410 m,30 m)和(0 m,410 m,30 m)四个点组成的矩形航迹飞行后,在(0 m,0 m,30 m)处垂直降落。转弯过程采用BTT转弯,倾转过程设计为:
该飞行航迹包含垂直起降、过渡转换和巡航3个阶段。在飞行过程中,根据倾转角度进行查表,得到合适的控制增益。
对飞行日志进行分析,通过Matlab生成飞行轨迹三维图(如图11所示)以及各惯性系下坐标轴方向位移(如图12所示)。

图11 三维航迹图

图12 沿轴向位移
通过图11和图12可以看到,验证机能够从原点垂直起飞至30 m,并且在此后的转换过程中基本达到高度稳定的要求。此过程中,验证机的滚转和俯仰姿态角以及对应的控制舵面输出如图13、图14所示;由空速计采集的空速信息如图15所示。由图15可以看到,验证机在30 s达到设定的巡航速度,气动力生效。由图13可以看到在43 s、58 s和80 s左右验证机进行BTT转弯,滚转角度约为23°,在90 s~100 s中,减速并从巡航模式转换为垂直降落模式。由图15可以看出巡航速度进行自适应修正,逐渐趋近于16 m/s。
图13 姿态角曲线

图14 舵面偏转角

图15 飞行速度
4 结论
文中所设计的倾转旋翼机全局控制器能够满足垂直起降、过渡过程和固定翼巡航3个模式下的控制要求。在转换过程中通过增益调度的方法实现控制面的逐渐切换,该方法采用离线计算,在线查表的方式,具有计算量小,易于工程实现的优势。利用四元数表征姿态的方法有效避免了欧拉角奇异的问题,试飞验证表明能够满足高度稳定和姿态稳定的控制要求。