双时间尺度下风电主导的微电网频率控制方法
2021-03-20赵熙临
赵熙临,吴 恒,付 波,查 冰,罗 维
(湖北工业大学 电气与电子工程学院,湖北 武汉 430068)
0 引言
微电网能与大型电网并网运行,也能进行孤岛运行[1]。微电网的发展体现在大量分布式发电技术的灵活、高效应用。这也意味着在系统调频过程中,微电网须要各分布式电源尽量参 与 其 中[2]。
为追求风能的最大化利用,传统风机通常是在最大功率点追踪(Maximum Power Point Tracking,MPPT)方 式 下 运 行,不 提 供 有 功 备 用[3]。然而,风电机组里蕴含着大量转子动能可参与到频 率 波 动 的 响 应[4],[5],文 献[6]根 据 频 率 的 波 动 在 短时间内调节转子转速,以释放大量动能达到发电侧与负荷侧之间的功率平衡。文献[7]通过调整桨距角改变风能利用系数,改变了双馈感应风电机组(Doubly Fed Induction Generator,DFIG)的 功 率输出,从而进行电力系统调频。文献[8]通过调整桨距角的方法使DFIG参与到传统电网中,但调频任务仍为传统火电机组主导。文献[9]提出了一种在高风速段采用转速和桨距角配合的二次调频控制策略。
微电网中风电的输出根据负荷的需求进行调整、控制,不存在最大化利用问题。文献[10]提出了在风、光、柴、微电网中将虚拟惯性与桨距角控制相结合的一次调频方法,提升了微电网的动态稳定性。文献[11]考虑微电网特性,通过发挥风电机组的调频能力,来减轻同步发电机的调频压力。文献[12]考虑到风机参与虚拟惯性控制后,转子转速二次跌落的问题,通过加入储能装置和限定转矩控制帮助转子进行转速恢复,有效增强了微电网频率的动态调节能力。文献[13]通过控制风电机组转子转速和调节桨距角预留备用容量,实现了一定程度的弃风,使风电机组拥有了更大的调频范围。以上针对风电参与微电网调频的研究主要以一次调频为主,无法消除频率稳态误差,也没有充分利用微电网中风机桨距角的调整范围来进行风电输出较大幅度的控制。
本文以DFIG为例,根据风机虚拟惯性与桨距角调整的互补性,在两个时间尺度下对风电机组进行输出控制,即充分利用虚拟惯性调节的快速性满足短时间尺度下的调频速度需求,以平抑短时波动;充分利用桨距角的调整范围进行输出功率的较大幅度调整,以满足负荷波动产生的二次调频需求。
1 电网调频特性分析
典型的微电网调频过程如图1所示[14]。由图1可知,当频率的波动跨越过死区时,系统响应一次调频过程时间约为40 s,其中惯性参与时间约为15 s,一次调频时间尺度为秒级。当该过程结束后,若频率仍未恢复到标准范围以内,且频率偏差不满足要求时,系统将进行二次调频,以消除频率误差,二次调频时间尺度为分钟级。

图1 微电网调频过程Fig.1 Frequency adjustment process in microgrid
2 风电的输出控制方法
风机功率输出取决于桨距角、风速等变量,其空气动力学模型为[15]

式中:Pg为风机所捕获的机械功率;Cp为风能利用系数;ρ为空气密度;A为叶片的扫风面积;V为风速;β为桨距角;λ叶尖速比;ωt为风力涡轮机转速;R为叶片半径。
2.1 风机的虚拟惯性控制方法
虚拟惯性控制可在短时间内释放风机转子里存储的动能,以平抑负荷的波动。当频率发生变化时,风机可释放的功率为[10]

式中:H为发电机组惯性时间常数;ωr为风机转子转速;f为系统频率。
风机正常运行时位于MPPT曲线上。以9 m/s的风速为例,此时风机运行于点A,对应转速为ωrA,当电网频率发生跌落时,风机运行点首先来到点B,随后到达点C,此时转速为 ωrC。在提取出动能进行响应负荷波动后,转子转速开始加速,逐渐恢复至 ωrA,风机重新运行到工作点A。同样,如果电网中频率增大,则风机的有功功率基准按照路径A-D-E-A运行,风机虚拟惯性控制运行曲线如图2所示。
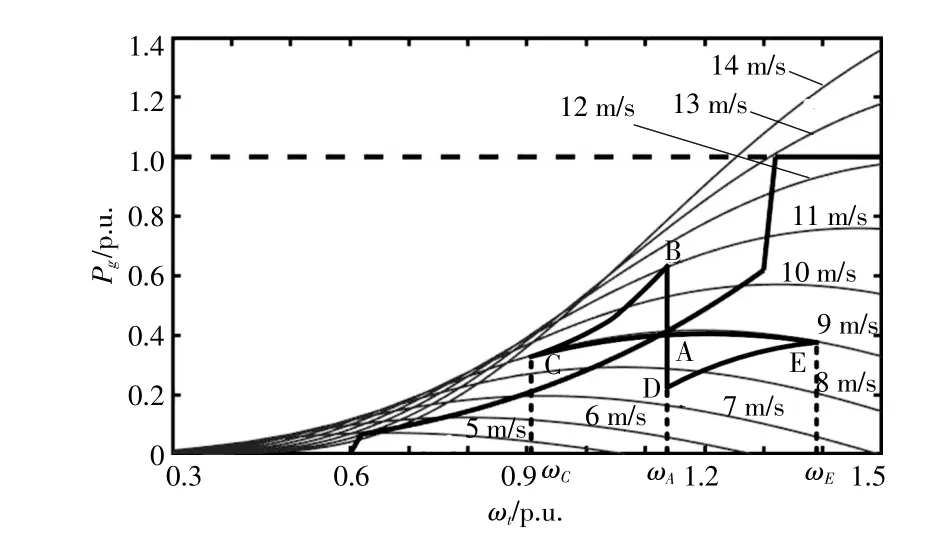
图2 风机虚拟惯性运行曲线Fig.2 Operation curve of wind turbine in virtual inertia
2.2 风机的变桨距角控制方法
调整风机的桨距角可以改变风机捕获的机械功率。桨距角控制是利用风机减载运行,以留有一定的桨距角裕度,使风机能通过调整桨距角来响应负荷波动的方法,如图3所示。
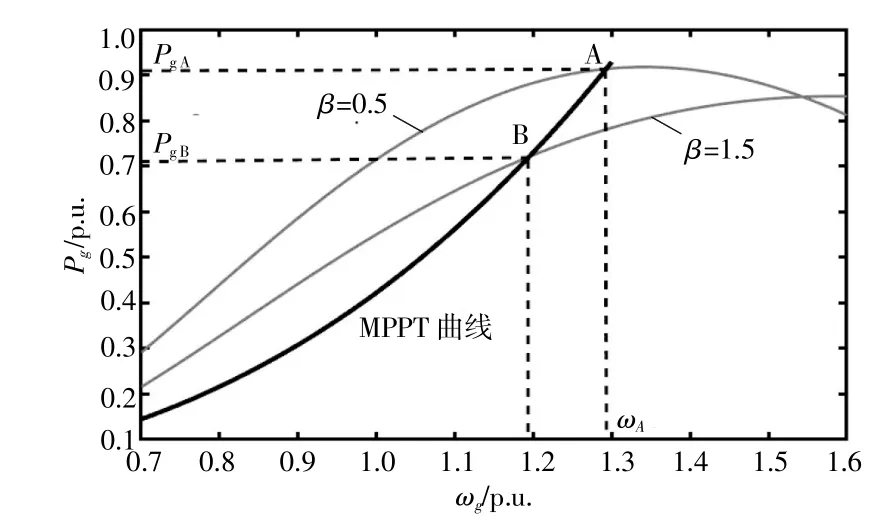
图3 风机减载运行曲线Fig.3 De-loading operation curve of wind turbine
当桨距角响应微电网系统频率变化的信号Δf后,风机的运行点从A点到B点,随之风机的输出功率由PgA变为PgB。
风机通过调整桨距角参与二次调频的控制如图4所示。图中:β0为初始预留的桨距角;风机从外部引入 Δf,通过PI控制器对桨距角执行器提供额外的桨距角信号 Δβ,从而改变风机输出[16]~[18]。

图4 桨距角控制框图Fig.4 Control block diagram of pitch angle
3 风机参与微电网频率控制策略设计
3.1 双时间尺度下风电参与微电网调频构想
虚拟惯性控制响应速度快,但维持时间短;桨距角控制涉及机械调整,投入时间较长[17],[18]。这两种风机输出的控制方式在时间尺度上正好与电网一、二次调频特征契合,如图5所示。
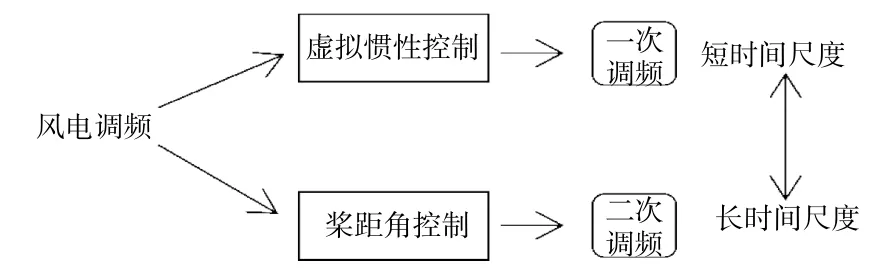
图5 双时间尺度风电频率控制示意图Fig.5 Schematic diagram of dual time scale wind power frequency control
在风机参与的微电网调频中,可将负荷波动事件按照发生时间的长短,区分为短时间尺度事件和长时间尺度事件,不同的时间尺度对应风机不同的频率控制方式。①短时间尺度:在负荷波动发生40 s内。通过虚拟惯性控制进行调频,发挥其在短时间尺度上快速响应的特性,以平抑负荷的短时波动。②长时间尺度:在负荷波动发生40 s后。通过桨距角控制进行调频,考虑其涉及到机械环节,所以响应时间相对惯性而言较长,但其调频范围更大,并且能参与到二次调频。组合使用二者在不同时间尺度的控制特性,可以有效提升系统调频适应能力。同时,考虑到当负荷需求过大时,进行桨距角与虚拟惯性相结合的风机输出控制方式可能仍无法满足微电网负荷频率的控制需求,此时,可启动柴油机参与到微电网的二次调频过程中。
3.2 虚拟惯性与桨距角互补控制方法
虚拟惯性控制为响应频率的变化率,转子可以在短时内释放大量的动能,能有效延缓负荷突变时频率达到最低值的时间,从而为微电网提供频率支撑。然而,由于DFIG本身特性所致,在短暂的支撑之后,会出现转子转速二次跌落的现象,直至转速完全恢复。在此时间内,桨距角的调整将改变风机捕获的机械功率,释放备用功率。这部分功率不仅注入微电网中进行二次调频,并且能将转子转速快速恢复至稳定状态。所以综合了虚拟惯性控制和桨距角控制的微电网调频方法,不仅有效解决了转子在释放动能后的二次跌落问题,而且能减小动态频率偏差。
频率控制流程图如图6所示。以风光柴微电网系统为例的系统结构如图7所示[4]。

图6 风光柴微电网频率控制流程图Fig.6 Wind photovoltaic diesel microgrid frequency control flow diagram
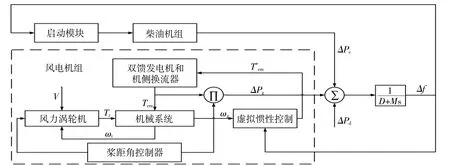
图7 风光柴微电网频率控制框图Fig.7 Wind photovoltaic diesel microgrid frequency control block diagram
由图6,7可知,光伏不参与微电网调频,外界环境对其输出功率的影响等效后叠加到负荷扰动 ΔPd中。风机虚拟惯性控制将系统频率变化率df/dt作为输入变量,在短时间尺度上响应系统频率变化。当微电网受到负荷扰动产生频率变化时,DFIG的有功功率参考值随之改变,有功功率通过速度控制器、机侧换流器使电磁功率Tem变化,而这部分增加的电磁功率是来自释放的转子动能。另一方面,DFIG从外部引入频率偏差信号Δf到PI控制器,对桨距角执行器提供额外的桨距角偏差信号Δβ,调整风力轮机的叶片桨距角,从而实现风机跟踪频率变化改变风机有功输出的效果,在长时间尺度上完成二次调频。当桨距角已调整至0°(风机满额输出)仍无法满足负荷需求时,启动柴油机模块,参与到微电网的二次调频中。
4 仿真分析
仿真分析基于Matlab/Simulink搭建如图8所示模型。将本文所提方案与纯桨距角二次调频、桨距角与虚拟惯性共同参加的一次调频作对比,以验证所提方法的有效性。微电网包括柴油机、光伏电池和风电机组等3种电源。风机采用Vestas 5 MW双馈感应式发电机;柴油机组额定输出功率2 MW;光伏最大输出功率2 MW,风速为10 m/s,预留桨距角为5°。
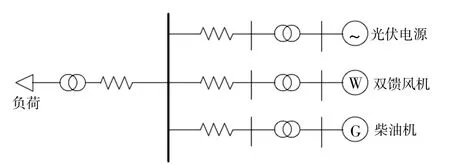
图8 微电网系统结构Fig.8 Microgrid system schematic
风机和柴油机参数分别见表1,2。

表1 风机参数表Table 1 Wind turbine parameters

续表1

表2 柴油机参数表Table 2 Diesel parameters
(1)无柴油机参与微电网小负荷需求时
在微电网负荷需求较小时,风、光功率输出足以满足负荷需求,此时,柴油机不参与微电网供能。负荷的随机波动大小如图9所示。系统及风机仿真结果如图10~12所示。

图9 微电网负荷波动Fig.9 Microgrid load fluctuations

图10 微电网频率变化图Fig.10 Microgrid frequency change figure
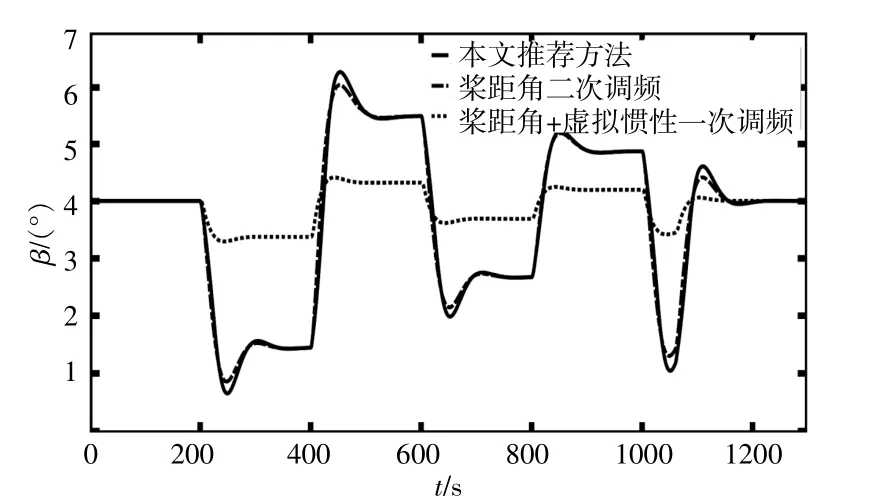
图11 桨距角变化图Fig.11 Pitch angle change figure
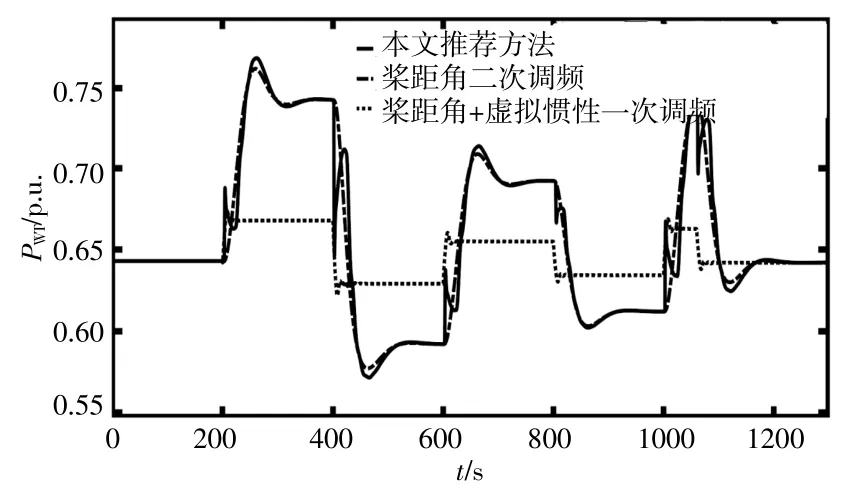
图12 风机有功输出变化曲线Fig.12 Active power output curve of wind turbine
由图10可知,与单纯的桨距角控制二次调频相比,本文所提方案在负荷波动初期频率变化更平缓。这是由于所提方案在考虑短时间尺度下引入风机惯性控制,对负荷波动引起的频率变化有了一个短期的支撑。相比虚拟惯性和桨距角在一次调频的结合使用,本文所提方法消除了频率稳态上的误差。由图11可知,负荷发生波动时刻,与虚拟惯性和桨距角在一次调频的结合相比,本文所提方案在风机桨距角和输出功率的变化上更大,扩大了风机调频范围。与桨距角控制的二次调频相比,本文所提方案的桨距角变化幅度略大,这是由于桨距角控制在长时间尺度上对风机转子恢复提供的能量所导致。由图12可知,由于转子提取了大量动能作为频率支撑,风机输出功率在负荷需求变化瞬间有更大的变化。
(2)柴油机参与微电网大负荷需求时
当微电网遭遇大负荷需求时,风、光满额输出也无法满足负荷需求,仅根据风机的二次调频已无法消除稳态误差,此时启动柴油机发电。假设当 微 电 网 在300 s增 加0.2 p·u·的 负 荷,频 率 响应曲线如图13所示。风机仿真结果如图14,15所示。

图13 微电网频率变化图Fig.13 Microgrid frequency change figure

图14 桨距角变化图Fig.14 Pitch angle change figure
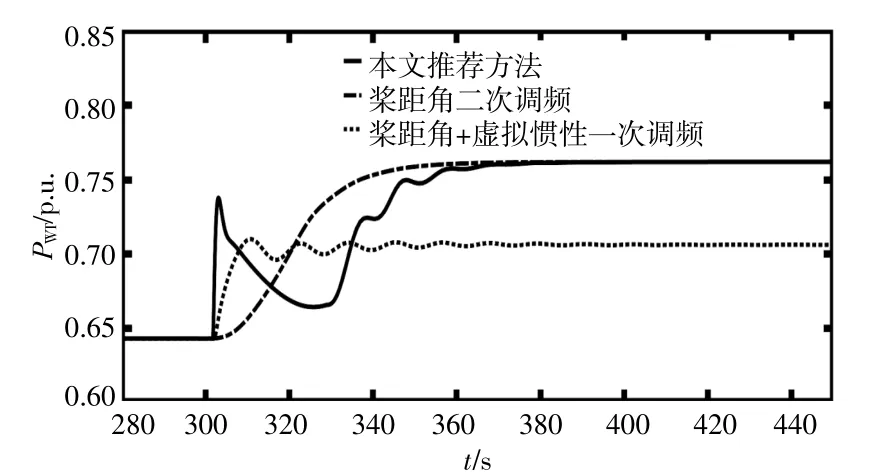
图15 风机有功输出变化曲线Fig.15 Active power output curve of wind turbine
由图13,14可知,当负荷需求增长较大时,本文所提方法相比虚拟惯性和桨距角结合的一次调频,频率稳态误差偏差更小,桨距角的调整幅度更大,风机的输出功率也更高,最大程度地利用了风电参与到调频中。由图13,15可见,与纯桨距角二次调频相比,本文方案的动态频率偏差更小,风机功率输出在负荷需求发生的瞬间就得到了迅速提升。由于风机已达到该风速下的最大输出,稳态误差仍然存在,柴油机随后在约400 s处启动,参与到微电网的二次调频,以消除系统的稳态误差。
5 结论
针对分布式发电单元在微电网调频中的参与问题,本文提出了一种双时间尺度下风电主导的微电网负荷频率控制方法,通过理论分析与仿真验证,得出如下结论。
①采用风电虚拟惯性与桨距角控制相结合的方法,即虚拟惯性参与电网一次调频,桨距角控制参与电网二次调频,能够使风电输出控制特性在时间尺度上与电网一次、二次调频特性相契合。
②当风、光的功率输出满足负荷需求,所提方法不仅能消除系统的稳态频率偏差,而且在短时间尺度内加入虚拟惯性使微电网获得更好地控制动态频率偏差。
③当风、光的功率输出不能满足负荷需求,须要柴油机参与时,本文所提方法可以使风机最大限度地参与调频,并减少微电网动态频率偏差。