皮带输送机永磁电机直驱系统关键技术研究
2021-03-18王成龙
王成龙
(山煤集团 煤业管理有限公司,山西 太原 030006)
0 引言
皮带输送机是一种应用广泛的远距离大功率运输设备,其传统的驱动方式是采用异步电机通过变速箱和液力耦合器带动滚筒,进而带动胶带运动,这种驱动方式存在体积大、耗能高的缺点,不适用于巷道狭窄、井下空间有限的应用场合。随着变频调速技术的发展,用永磁同步电机和变频器的直驱系统取代异步电机和变速箱、液力耦合器的驱动系统逐渐成为更优选择,永磁电机直驱技术具有安装体积小、成本低、电能消耗少等优点,对永磁同步直驱技术的关键技术进行研究具有重要意义。
1 永磁同步电机应用分析
一套典型的异步电机驱动系统主要包括异步电机、液力耦合器、减速器、高速联轴器、低速联轴器和相关配电装置。异步电机启动过程不平稳且在工频电压下运行时的功率一般小于额定功率,此外液力耦合器和减速器都会产生能量的损失。而永磁同步电机转子上潜入了稀土材料制成的永磁体,三相定子绕组在旋转磁场的作用下通过电枢反应感应三相对称电流,因此无需额外的励磁电流,与异步电机随着负载增加满载效率下降相比,永磁同步电机的效率随着负载的增加而提升,一般可达到94%以上。图1为异步电机与永磁同步电机效率对比。
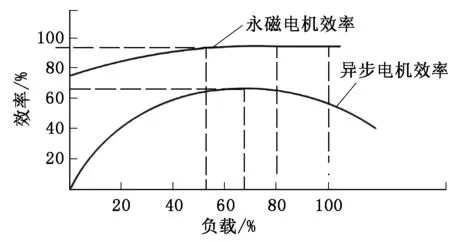
图1 异步电机与永磁同步电机效率对比图
永磁同步电机在应用上具有以下特点:①设备安装时采用气隙进行扭矩传动,无需较高的安装精度,减少了振动;②空载时皮带输送机产生的机械冲击小,具有过载保护功能,避免烧坏电机;③采用主从控制电机电流,方便实现多电机功率平衡;④驱动系统简单,设备调试和维护成本低。
2 双电机刚性连接功率平衡技术
永磁同步电机驱动系统无需液力耦合器和减速器,永磁同步电机的轴与滚筒直接相连,输送机依靠胶带和滚筒的摩擦力运输货物,故称之为直驱系统。本文研究的系统为双滚筒三电机皮带输送机,其结构如图2所示,胶带上配置有滚筒A和滚筒B,滚筒A由永磁同步电机PMSM1和PMSM2共同驱动,因此PMSM1和PMSM2是刚性连接;滚筒B由永磁同步电机PMSM3单独驱动,滚筒B与滚筒A之间通过皮带柔性连接。
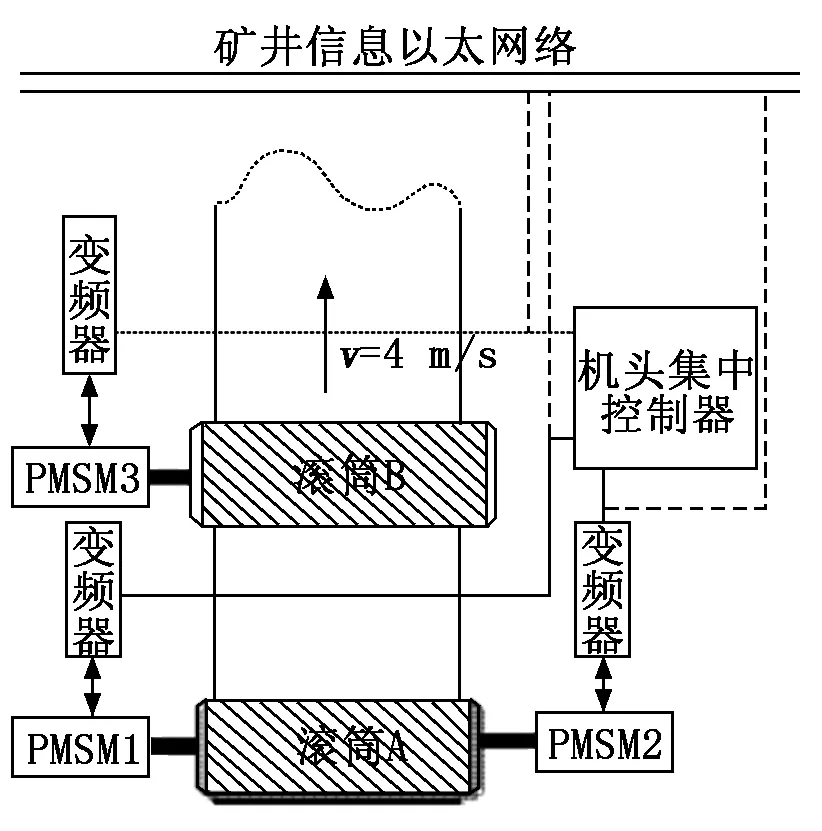
图2 双滚筒三电机皮带输送机结构图
由于PMSM1和PMSM2的轴是刚性连接,如果没有相关功率平衡控制,必然会造成二者转矩不等,长时间运行会导致过载电机负荷过大而引发故障,滚筒A的机械结构也会变形。传统的双闭环控制系统中,电流内环采用PI控制,为了提高系统的转矩精度和响应速度,采用模型预测控制器,忽略刚性连接轴的角度偏差,采用主从控制策略,将PMSM2设置为主机,PMSM1设置为从机,从机的转矩电流根据主机的转速和转矩方程确定,PMSM1和PMSM2的转矩方程为:

(1)
其中:J1和J2分别为PMSM1和PMSM2的转动惯量,且满足J1=J2;ωm为机械角速度;μ1、μ2分别为PMSM1和PMSM2的摩擦因数;Te1和Te2分别为PMSM1和PMSM2的电磁转矩;TL为负载转矩。
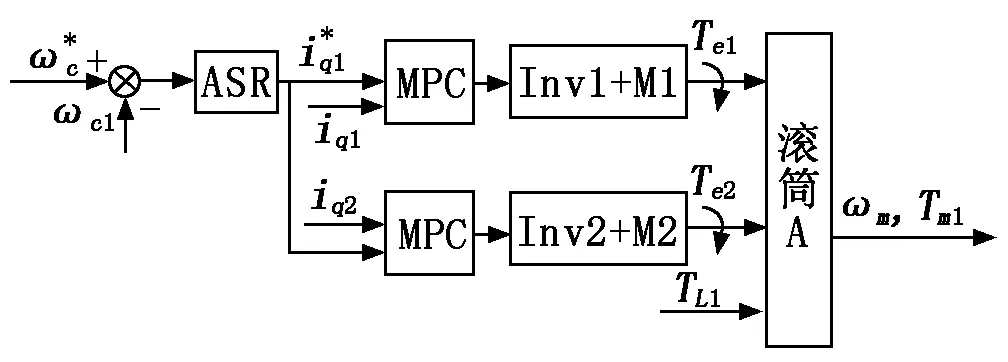
图3 双电机刚性连接功率平衡控制策略
3 多机柔性连接功率平衡技术


图4 多机柔性连接功率平衡控制策略
本文采用典型的双闭环控制系统,提高了皮带机的动态特性,电机的转速和电流通过可编程控制器和变频器控制,转矩电流的偏差通过PI调节器补偿,MPC控制器计算得到最优电压矢量和PWM脉冲信号。此外还配合了环形耦合策略进行转速快速调节。在双滚筒三电机的系统中,必须同时考虑刚性连接和柔性连接电机的功率平衡,由于某些原因导致其中一台电机转速降低时,需通过增大其转矩提高其功率,在实际应用中,皮带输送机的运行速度与给定速度之间的误差应不大于3%,这样才能保证三电机之间功率平衡,带式输送机可靠运行。
4 无位置传感器永磁同步电机控制技术
对于永磁同步电机矢量控制,一般的方法是采集电机的转速和转子位置作为控制器输入信号,电机的转速测量方便,但是转子的位置需要通过位置传感器采集,位置传感器存在价格高且安装不便的困难,因此研究无位置传感器的永磁同步电机控制技术具有重要意义,可以节省成本,提高可靠性。
无位置传感器控制技术是当前电机控制领域的热点技术之一,根据电机运行的速度划分,分为中高速无位置传感器控制技术和零低速无位置传感器控制技术。中高速无位置传感器控制技术又分为反电动势直接计算法、反电动势积分法等开环估算和状态观测器、扩展卡尔曼滤波等闭环估算。零低速无位置传感器控制技术有高低频信号注入法和载波信号成分法。
电子皮带运输机的额定转速较高,因此本文设计的滑模观测器属于中高速领域。永磁同步电机反电动势在两相静止坐标系下的模型如式(2)所示:
(2)
其中:eα、eβ为静止坐标系下的反电动势;ψf为转子磁链;ω为转子角速度;θ为电角度。
根据式(2)设计出的滑模观测器原理框图如图5所示。图5中,atan为反正切函数,Us、is、es分别表示电机电压、定子电流、定子电动势(由于采用了预测控制,估计值使用“^”表示)。滑模观测器的稳定性根据李雅普诺夫稳定性判据进行判定,由于反电动势中包含了不连续的符号函数,因此具有高频扰动,采用低通滤波器对反电动势进行低通滤波处理,得到的反电动势更加稳定。
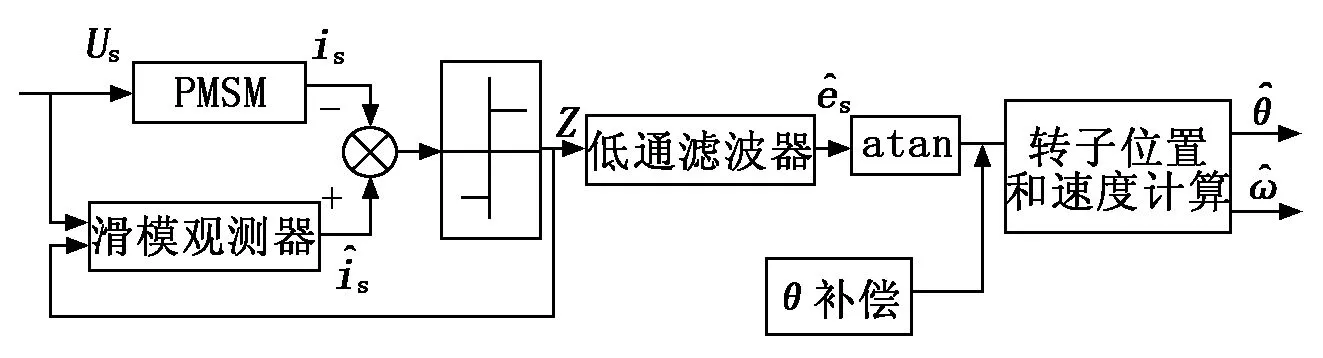
图5 滑模观测器原理框图
5 结语
对于异步电机拖动的皮带输送机进行技术改造,研究了一种双滚筒三电机模式的永磁电机直驱系统,并对其涉及到的关键技术进行了研究。对于两轴刚性连接和通过胶带柔性连接的永磁同步电机,分别研究了不同的功率平衡控制策略;针对位置传感器安装不便、成本较高的问题,研究了滑模控制器估算转子位置的控制方法。永磁同步电机直驱技术能够提高皮带运输机的效率、降低电费,是未来皮带输送机的技术改进方向。
