自动化药房分拣机械手的设计
2021-03-18柴启茗李成群高小康
柴启茗,李成群,高小康
(华北理工大学 机械工程学院,河北 唐山 063210)
0 引言
在现代社会飞速发展的趋势下,我国社会的主要矛盾已经转化为日益增长的人民对美好生活的需要与不充分不平衡的发展之间的矛盾。虽然国内大型医院的医疗技术水平已经达到世界领先水平,但与医疗技术水平相比,医疗卫生的服务质量却不尽如人意[1]。在大多数医院门诊药房仍是传统的人工售药,在急诊高峰期,总会出现人员拥挤的现象,传统模式下的药师仍是依据门诊开的处方对药品进行实时的手工调配,人工取药存在着工作效率低、有时可能因药师个人原因出药错误等问题。药房自动化可以有效地减少患者排队时间,改善就诊环境,提高发药的准确率,降低药师劳动强度,提高药房的自动化管理水平[2]。因此,医院药房自动化是药房发展的必然趋势[3]。
本文设计了一台主要由整筐出药装置、取药机械手、拍照识别装置和临时储药装置组成的自动化药房分拣机械手。
1 分拣机械手结构的设计
自动化药房分拣机械手整体结构简图如图1所示,其主要包括临时储药装置6、整筐出药装置5、拍照识别装置4、机械手3和坐标机器人2。坐标机器人是以XYZ直角坐标系为基本数学模型,以伺服电机为驱动的单轴机械臂为基本工作单元,以滚珠丝杆、同步皮带为常用的传动方式所架构起来的机器人系统。机械手安装在由X方向、Y方向导轨组成的坐标机器人上。
1.1 整筐出药装置
整筐出药装置整体结构如图2所示。最下层底板16固定在框架上,伺服电机11固定在中层底板19下方,同步带12分别与最上层底板5的连接架15和最下层底板16的连接架10连接。支撑架4放置于最上层底板上,储药筐2放置于支撑架上。此种结构能够保证储药筐置于指定位置,并且能够做平稳的平行运动。
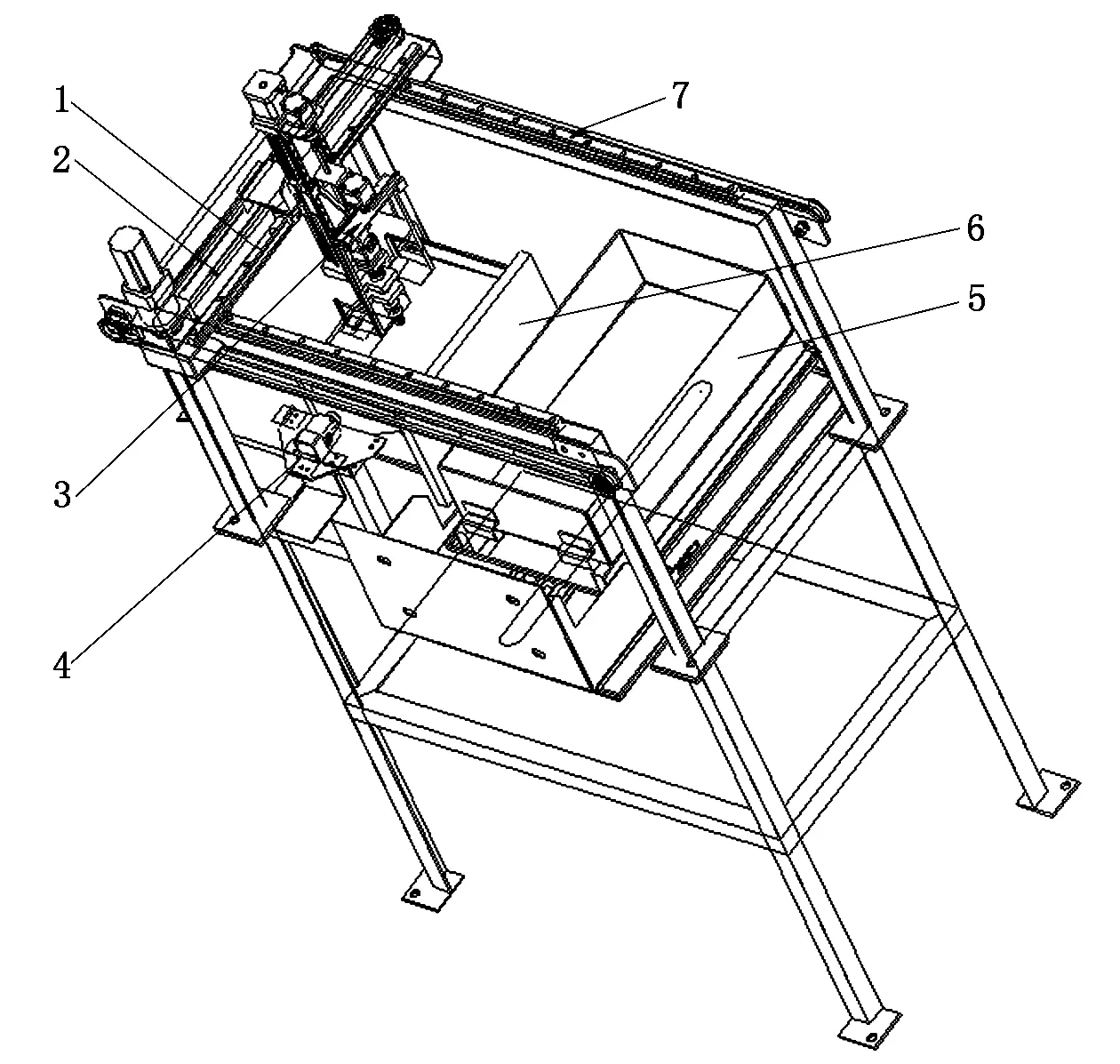
1-Y方向导轨;2-坐标机器人;3-机械手;4-拍照识别装置;5-整筐出药装置;6-临时储药装置;7-X方向导轨图1 自动化药房分拣机械手整体结构
整筐出药装置与抽屉功能类似,利用伺服电机驱动同步带轮,带动底板共同弹出。由于最下层底板固定在框架上,伺服电机驱动,最下层底板不动,中层底板沿着导轨向外运动,最上层底板沿着直线导轨向外运动,三层底板分别有相对运动。伺服电机固定在中间底板,跟随底板运动。设计整筐出药装置的目的是为了快速获取大量药品,大大加快出药速度。
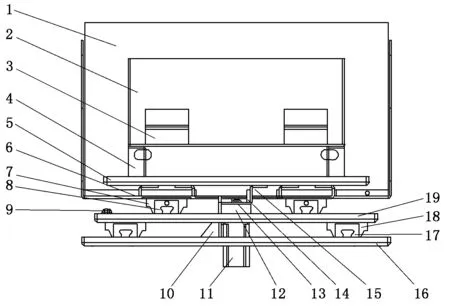
1-挡板;2-储药筐;3-储药筐拉手;4-支撑架;5-最上层底板;6-垫板;7,18-滑块;8,17-直线导轨;9-弹簧;10-最下层连接架;11-伺服电机;12-同步带;13-同步带轮;14-张紧装置;15-最上层连接架;16-最下层底板;19-中层底板图2 整筐出药装置结构简图
1.2 取药机械手
机械手工作时,仅依靠X、Y、Z三个方向运动即可完成取药动作。机械手X、Y方向的运动机构主要由水平直线导轨、同步带、同步带轮和交流伺服电机构成;其上下方向的运动主要由滚珠丝杠和交流伺服电机构成。机械手结构简图如图3所示。

1,14,20,26-伺服电机;2,13-电机托板;3-圆形导轨;4,6-滑块;5-连接块;7-手爪连接架;8-固定手爪;9-吸盘;10-吸盘连接架;11-轴承;12,24-联轴器;15-底托;16-滑动手爪;17-齿轮;18-齿条;19-齿条连接架;21-连接架;22-丝杠;23-直线导轨;25-架体图3 机械手结构简图
伺服电机1驱动丝杠带动架体25向待取药品方向运动,待到达指定位置后,吸盘9吸住药品,伺服电机1反转,将药品提升到设定高度后,伺服电机26转动通过联轴器24带动丝杠22转动,从而控制滑动手爪16向下运动,到达合适位置后,伺服电机20转动带动齿轮17、齿条18控制滑动手爪16夹紧,之后伺服电机26反转控制滑动手爪16向上运动,使固定手爪8从下方拖住药品;之后坐标机器人通过伺服电机驱动同步带轮带动机械手在X方向运动,到达落药口位置时,伺服电机14旋转带动药品360°旋转,并且每90°拍照识别一次;完成360°旋转并且完成4次拍照之后,手爪张开,吸盘松开,使药品落入临时储药装置中,随后手爪回到初始位置,机械手取药过程完成。
1.3 临时储药装置
临时储药装置整体结构简图如图4所示。推药板2通过连接板4与直线导轨9相连接,直线导轨9固定于底板6上,推药板2可以沿直线导轨9方向平行移动;电动推杆5安置于底板的下方,其一端与底板连接,另一端与连接板4相连接,电动推杆5提供动力,带动推药板2向出药口方向运动,完成送药;待送药完毕,电动推杆5带动推药板2回到初始位置。
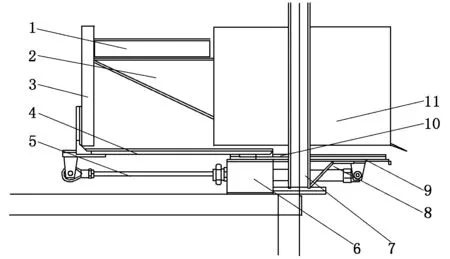
1-限位挡板;2-推药板;3-挡板;4-连接板;5-电动推杆;6-底板;7-框架;8-支撑架;9-直线导轨;10-滑块;11-临时储药箱体图4 临时储药装置结构简图
将推药板的接收落药部位设计成斜面,其目的是减小药品在落入储药装置时对外包装的损坏程度,并且,落入临时储药装置的药品可以沿斜面顺利滑下,以便被推药板推出。
2 分拣机械手的控制系统
分拣机械手的控制采用二级控制系统,上位机为工控机,下位机为PLC,下位机通过接收上位机的指令进行动作。充分发挥下位机稳定、易控、结构紧凑和上位机交互界面友好、数据计算能力强等优点[4]。控制系统由6个伺服电机和1个电动推杆组成,以欧姆龙CP1H PLC为关键部件,协同完成取药功能。其中,6个伺服电机分别用M1、M2、M3、M4、M5和M6表示。M1、M2分别通过驱动同步带轮带动同步带完成机械手的X方向、Y方向上的运动,M3通过驱动丝杠带动机械手Z方向上的运动,M4通过驱动丝杠带动辅助手爪在Z方向上运动,M5驱动齿轮通过齿条带动手爪的夹紧和张开,M6驱动轴通过吸盘连接架控制吸盘的转动。选用CP1W-40EDR I/O继电器输出扩展模块来控制电动推杆、气泵和伺服电机M6,与PLC联合实现伺服电机控制。控制系统框图如图5所示。
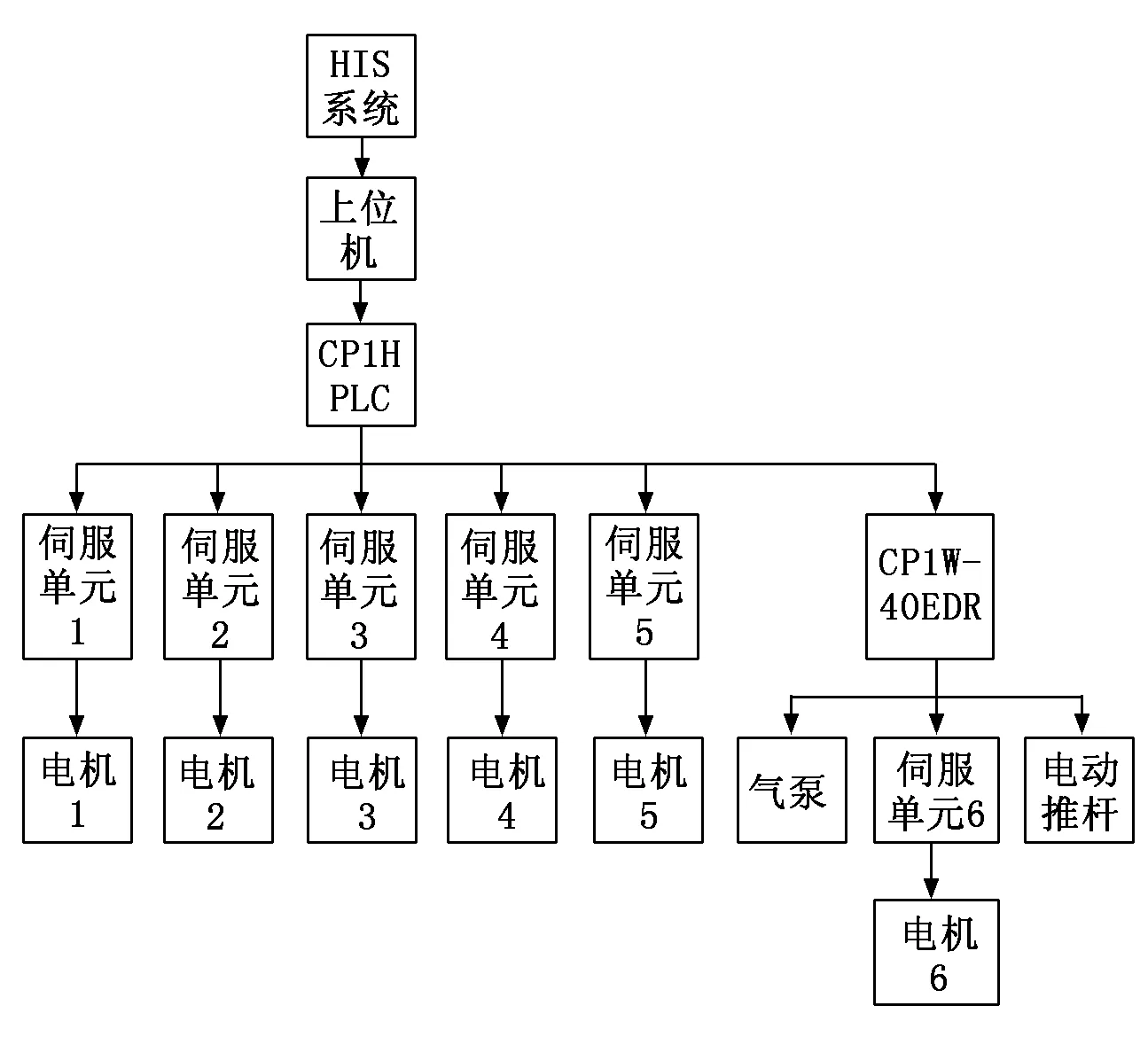
图5 控制系统框图
2.1 机械手取药的控制原理
取药时,通过PLC对系统的控制实现X、Y、Z三个方向上的精准定位。分别由三个交流伺服电机M1、M2、M3控制,待取药机械手到达指定位置后,指令驱使伺服电机M4正转,带动支架向前运动指定行程;到达指定位置后,由CP1W-40EDR扩展模块控制气泵,由吸盘抓取药品,之后伺服电机M3反转驱动,待药品到达指定位置,伺服电机M4正转,到达指定位置后,伺服电机M5正转夹紧,随后伺服电机M4反转;药品移动至储药装置上方,伺服电机M6旋转,待旋转360°后,伺服电机M5反转,伺服电机M4反转,CP1W-40EDR扩展模块控制气泵,使药品掉落;药品落入临时储药装置后,CP1W-40EDR扩展模块控制电动推杆动作,送出药品,随后控制电动推杆将推药板带回初始位置。
2.2 拍照识别装置的控制原理
药品到达临时储药装置正上方时,由摄像头对药品拍照识别来采集药品信息。它利用光电元件识别药品,将拍照获得的光信号转换成电信号,再将电信号通过模拟、数字转换器转化为数字信号传输到计算机中处理,更新存档药品信息,当未检测到药品信息时,将信息反馈给计算机,再进行一次药品的抓取[5]。此装置可以保证出药的稳定,同时将未稳定抓取信息提供给工作人员,并做出相应处理。
3 控制系统软件功能的设计
根据实际工作要求,自动化药房分拣机械手采用CX-Program对PLC进行编程。PLC的编程理念是在满足设备运行要求的情况下,语言简洁、操作简单,并不断优化[6]。控制系统软件流程如图6所示。在所选驱动装置中,基本上都选择了电机驱动,所以着重进行电机的软件设计。当取药动作开始时,系统会给需要运转的电机传递启动信号,接收到信号后要进一步确定运动方式,获得系统中设定的运转速度值与可允许的最大运转速度值。由于各种原因,电机在实际运行过程中不会一直按照设定的值运行,所以一般都会给出一个误差范围[7]。对综合实时反馈给系统的电机速度与误差范围做PI运算,实现实时控制矫正电机速度。在存在速度反馈的同时,将电机电流大小也实时反馈给系统,同样电流的数值大小也会给出一个误差范围,相比之后得到电流的误差,再进行一次PI运算,确保电机稳定运行。
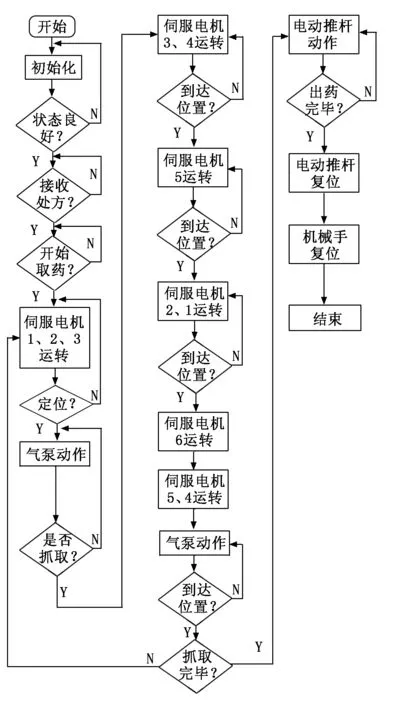
图6 控制系统软件流程
4 结束语
针对当前我国药房出现的问题,提出了一种可实现的自动化药房分拣机械手,并且介绍了自动化药房分拣机械手的总体结构、控制原理和系统软件功能。系统结构简单,充分利用CP1H PLC的强大功能,实现了对系统的控制。药房自动化是当代中国医院药房的发展方向。自动化药房分拣机械手的研究,提高了药房的工作效率,为我国药房自动化、药学服务行业的发展起到了积极的促进作用。
