大型植保无人机航行路径跟踪控制研究
2021-03-18王天阳章天杨陶学恒叶华国
王天阳,章天杨,陶学恒,叶华国
(1.大连工业大学 机械工程与自动化学院,辽宁 大连 116034;2.安徽工程大学 机械与汽车工程学院,安徽 芜湖 241000)
0 引言
随着智能控制技术的快速发展和农业现代化进程的不断深入,无人机技术从军事领域向民用领域推广应用,主要体现在土地资源和灾害监测、火灾预警、地图测绘、物流快运和植被保护等方面。就植被保护而言,大多数采用的是小型四旋翼无人机在特定的小区域范围内进行作业,由于考虑到无人机功率小、农药携带量少,通常需要进行无人机航行路径规划,以提高作业效率。关于植保无人机的路径规划问题国内外已经展开了许多的研究工作,文献[1-3]描述了植保无人机的关键技术并展望了植保无人机未来的发展趋势。文献[4,5]用蚁群算法为无人机进行规划路径,节省了计算时间,得到了一条代价较小的无人机航迹。文献[6,7]基于遗传算法和改进粒子群算法,实现了无人机多作业区域航线的全局规划和多植保无人机协同路径规划。文献[8-10]介绍了植保无人机避障和多无人机最小能量消耗路径规划算法研究。
对于大面积、比较宽阔的植被或者农作物保护任务,小型旋翼无人机的作业时间和载药量就无法满足要求,需要选用长航时、大载重量的大型固定翼无人机。文献[11-13]介绍了固定翼无人机用于军事领域的任务规划和跟随导航技术。本文正是基于能量和作业效率,研究大面积植保环境下固定翼植保无人机的航行路线规划问题。根据文献[14]的制导理论和DUBINS曲线[15,16]规划出无人机目标路径后,运用经典PID控制算法并基于模糊控制理论设计航迹跟踪控制器,在MATLAB/Simulink平台上作进一步仿真优化,以验证路径控制算法的有效性。
1 无人机运动学模型
1.1 无人机常用坐标系之间的转换[17]
参考前述相关文献,确定无人机运动学方程首先要明确各坐标轴间的关系。无人机的运动姿态就是与其固联的体坐标系相对于某参考坐标系的方位关系,基本的姿态参数是这两个坐标系之间的方向余弦矩阵。无人机运动学模型的建立即是在惯性坐标系、机体坐标系、航迹坐标系以及气流坐标系等4个坐标系中描述无人机的运动参数。考虑两个坐标系间的转换时,设坐标系A和坐标系B的3个正交轴的单位矢量分别为{a1,a2,a3}、{b1,b2,b3},坐标系B的单位矢量可由坐标系A的单位轴矢量表示,即:
(1)

坐标系A到坐标系B的方向余弦矩阵为:
(2)
无人机坐标系转换如图1所示。假设任意两个坐标系A到坐标系B仅在X轴、Y轴、Z轴的某一方向轴上存在旋转角度θ时,对应的坐标转换矩阵如式(3)~式(5)所示:
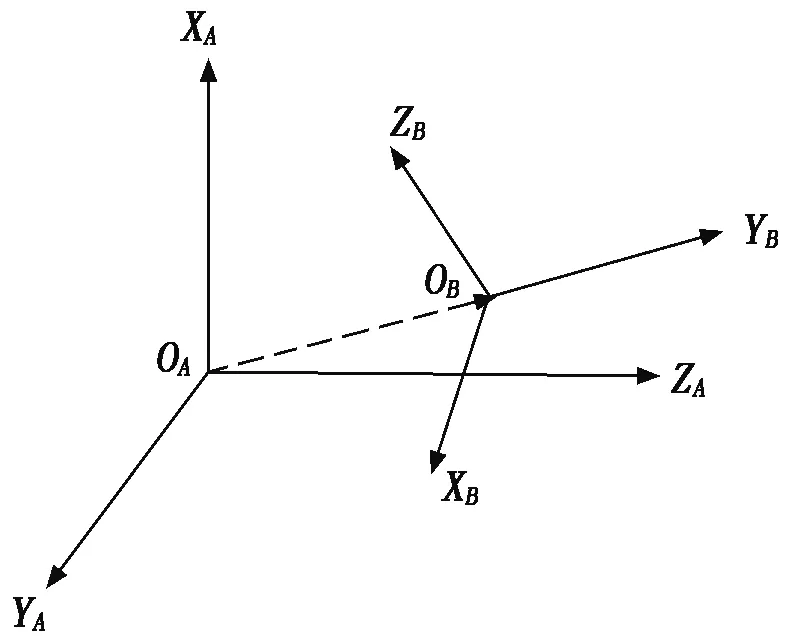
图1 无人机坐标系转换
(3)
(4)
(5)
1.2 无人机的质心运动学方程
无人机的质心运行学方程是研究其飞行性能、飞行轨迹以及位置随时间变化规律的基础。研究无人机的质心运动时通常假定无人机是刚体,可用动量矩定理来描述,即:

(6)
其中:hI为惯性坐标系中的动量矩矢量;LI为在惯性坐标系中作用于刚体的外力矩。
根据动量矩定理和坐标转换矩阵可得到式(7):
(7)
将式(7)简化后可得式(8):
(8)
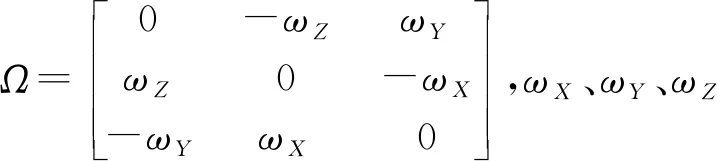
将式(8)展开成分量形式并做简化可得到无人机常用的动力学方程式(9):
(9)
其中:LX、LY、LZ为机体坐标系中的外力矩在X、Y、Z三个坐标轴方向的分量;IX、IY、IZ为机体坐标系惯量矩阵在X、Y、Z三个坐标轴方向的分量。
要描述无人机相对于地面的位置变化规律和姿态变化规律,得到无人机的飞行轨迹,还需要建立无人机的质心运动学方程:
(10)
其中:v为质心运动速度;α、β分别为地面坐标系和航迹坐标系转换时地面坐标系绕Z轴和Y轴的旋转角。
2 植保无人机的目标路径
研究植保无人机的航迹规划问题时,首先要分析无人机的约束条件,包括禁飞区、威胁区、地形障碍等地理限制因素,还包括姿态角、最小转弯半径等无人机的自身飞行限制条件。对于大型固定翼植保无人机,假设其植保范围为3 000 m×3 000 m的正方形区域,可以规划该植保无人机的目标路径,如图2所示。
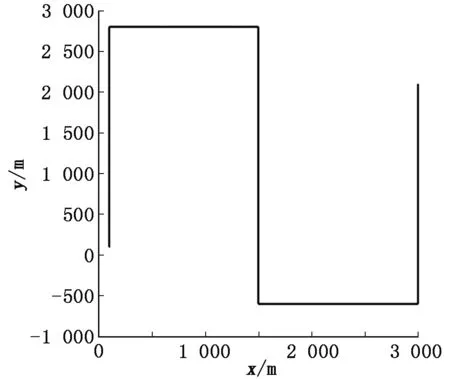
图2 植保无人机的作业路径
但是,图2所示的目标路径不适合作为固定翼无人机的飞行路线,在该路径的直角转弯部分固定翼无人机不能够像旋翼无人机那样悬停或者实现点对点的飞行,需要一段平滑的圆弧路径过渡,且该圆弧应当满足无人机的转弯半径约束。因此必须基于DUBINS曲线的相关原理对图2所示路径进行优化。若平面上的两点满足间距L大于两倍的无人机最小转弯半径r(即L>2r)条件,就必然存在DUBINS路径,它是一条能够满足无人机航向和转弯半径的圆弧-直线-圆弧路径。经过优化后的植保无人机目标路径如图3所示。
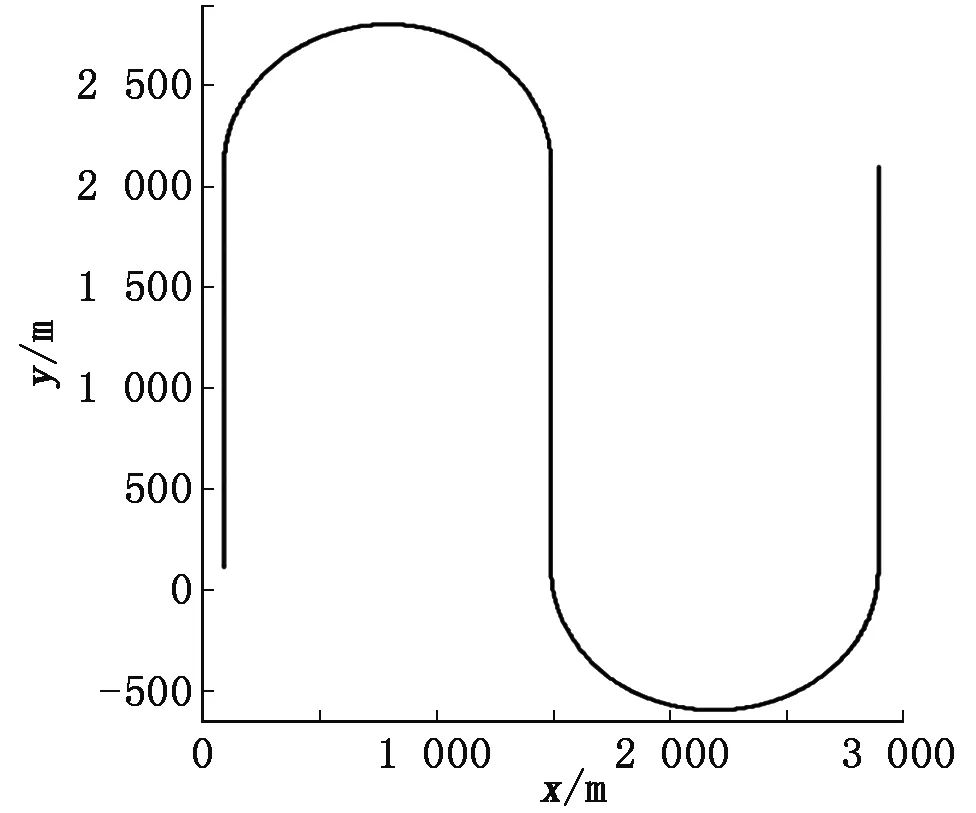
图3 优化后的植保无人机目标路径
3 路径跟踪控制器
为了使无人机能够按照目标路径飞行,需要设计无人机的路径跟踪控制器。路径跟踪控制器由制导律和控制律组成,其中制导律为控制律提供无人机的速度指令,控制律按照指令控制无人机飞行,实现内外环控制。基于线性制导律设计出传统PID控制器,实现无人机跟踪目标路径飞行控制。为提高跟踪控制精度,采用模糊控制理论[18-20]对PID控制器进行优化。
根据模糊控制理论将PID控制器中的偏差以及偏差变化率与PID控制器的比例、积分、微分参数联系起来,建立相关的模糊规则,实现三个参数的自适应调节,提高无人机的跟踪控制精度。无人机的模糊PID控制器如图4所示。
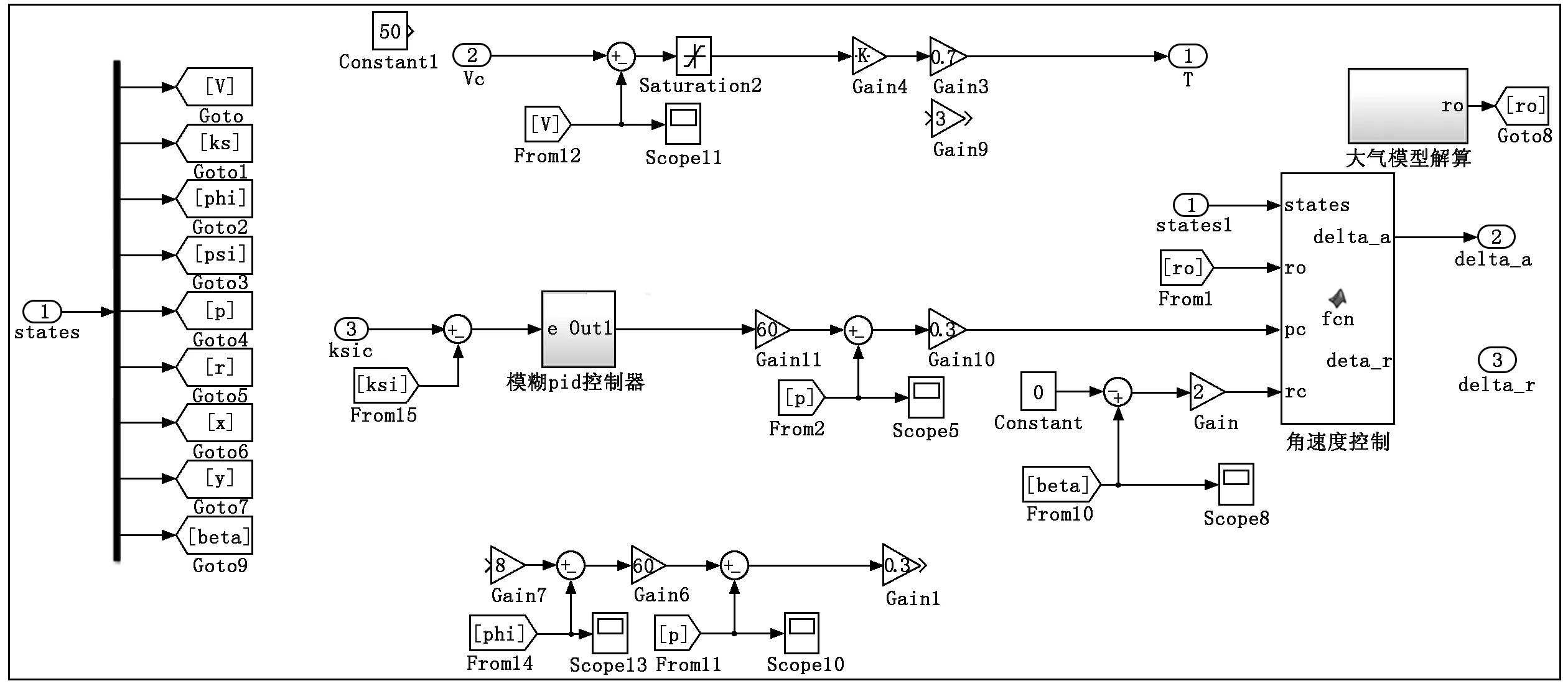
图4 植保无人机模糊PID路径跟踪控制器
在MATLAB/Simulink软件中对两种路径跟踪控制器的跟踪效果进行对比仿真,结果如图5所示。由图5可以看到:模糊PID控制器的跟踪效果要优于传统PID控制器的跟踪效果。图6为跟踪目标路径时,两种跟踪控制器的航迹角度和速度变化情况。由图6可以看出:模糊PID路径跟踪控制器的跟踪响应速度和稳定性明显优于传统PID控制器。
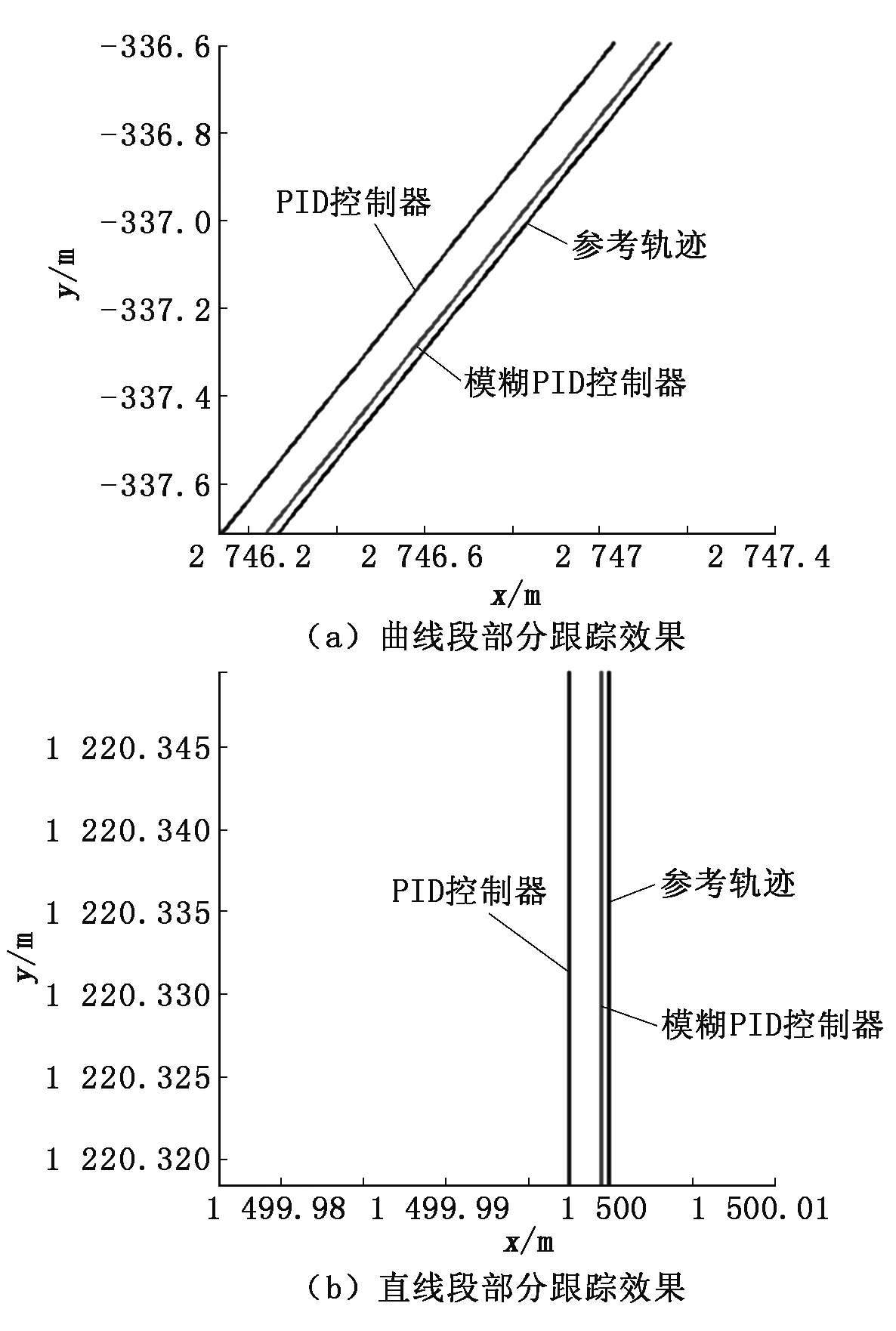
图5 两种控制器航迹跟踪控制效果

图6 两种控制器跟踪航迹角度和速度变化情况
图7为两种路径跟踪控制器的跟踪误差仿真结果,图8为x方向和y方向上的跟踪误差。由图7和图8可以看出:模糊PID控制器的跟踪误差明显小于普通PID控制器的跟踪误差。
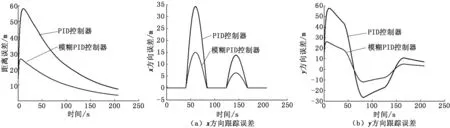
图7 两种控制器跟踪误差 图8 x向和y向上的跟踪误差
综上所述,从控制精度、稳定性以及响应速度三个方面来看,模糊PID控制器能够提高无人机飞行线路的控制效果。
4 结论
(1) 针对大范围作业的植被保护机器人,考虑到作业效率和载药量,选用固定翼无人机更为适宜。但必须考虑固定翼无人机的转弯半径和航向约束问题,可以基于DUBINS曲线相关理论对目标路径作出规划。
(2) MATLAB软件仿真结果表明,模糊PID控制器对固定翼无人机的航行路径跟踪效果更佳,与目标路径的误差更小,其中曲线段跟踪误差为0.01 m量级,直线段跟踪误差为0.001 m量级。
(3) 模糊PID控制器在航迹角度误差、速度变化、航行方向误差等方面均明显优于PID控制器,控制精度高、稳定性好。
