飞机发动机逼喘实验器液压控制系统研究
2021-03-18王野牧
王野牧,张 阳,李 奇
(沈阳工业大学 机械工程学院,辽宁 沈阳 110870)
0 引言
飞机发动机逼喘实验的目的是为了获得发动机的喘振工作点,进而确定稳定的工作边界,避免由喘振引起的飞行风险以及事故的发生。逼喘实验是将逼喘实验器供油口与发动机燃油总管相连,使进入燃烧室的燃油瞬时急增,实现发动机恒定转速下的逼喘,进而获得发动机的喘振工作线。在该实验器正式应用之前,国内没有类似实验器,由于保密原因国外资料可以参考的寥寥无几。故需完全重新研制一台逼喘实验器,为发动机整机逼喘实验提供数据保障,也为后续相关实验提供参考资料。
根据实际工况需要,实验器所需要实现的技术指标如下:①向内部压力最高为10 MPa的燃油总管注射最大量为125 mL的燃油;②需在0.2 s内注射完成;③燃油注射精度0.1%且不允许有超调。
1 逼喘实验器的组成及工作原理
逼喘实验器主要由液压泵站和燃油注射系统两部分组成。图1为逼喘实验器液压原理图。燃油注射系统由燃油注射器和伺服油缸组成,燃油注射器将燃油注射到燃油总管中并与发动机燃油调节系统的供油汇合,一同注射到燃烧室中,因此控制燃油注射量即控制伺服油缸的位移。位置闭环系统由伺服控制器、伺服比例阀、位移传感器构成。位移传感器采集伺服油缸位置信号,传递给伺服控制器,再由伺服控制器进行计算、分析并控制伺服比例阀的开度,从而实现闭环位置控制。
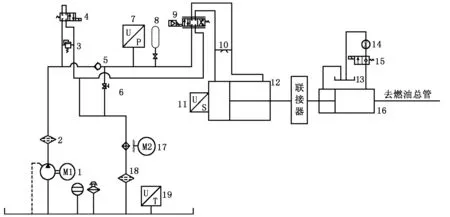
1-油泵电机组;2,18-过滤器;3-溢流阀;4,15-电磁换向阀;5-单向阀;6-截止阀;7-压力传感器;8-蓄能器;9-伺服比例阀;10-泄漏阻尼孔;11-位移传感器;12-伺服油缸;13-接油筒;14-流量开关;16-注射油缸;17-风式冷却器;19-温度传感器图1 逼喘实验器液压系统原理图
2 基于AMESim的位置系统模型建立
2.1 伺服比例阀模型建立
伺服比例阀作为逼喘实验器液压系统的重要核心元件,其性能好坏直接影响系统的控制精度以及响应时间。阀模型准确性将直接影响仿真结果,在AMESim中建立如图2所示伺服比例阀模型,图2中,k为伺服比例放大系数,ω为伺服比例阀固有频率,ζ为伺服比例阀阻尼比。模型参数如表1所示。
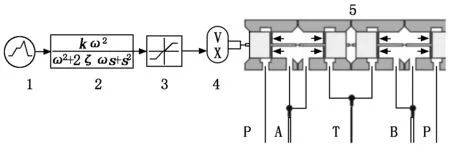
1-伺服比例阀输入信号;2-二阶振荡信号;3-阀芯饱和位移;4-位移信号转换;5-阀体图2 伺服比例阀仿真模型

表1 伺服比例阀参数
2.2 闭环控制系统模型的建立
逼喘实验器闭环位置控制系统框图如图3所示。逼喘实验器的阀控非对称缸的位置控制系统包括两部分:第一部分是采用经典PID控制的闭环控制系统,第二部分是引入前馈补偿控制的部分。
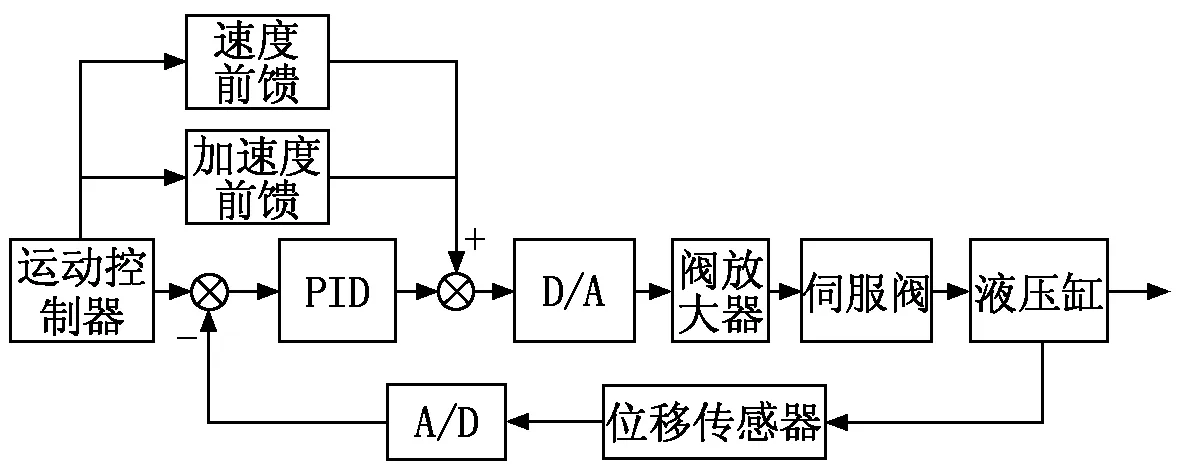
图3 逼喘实验器闭环位置控制系统框图
带有前馈补偿的控制策略是,由控制器预先生成目标曲线,由控制器控制液压缸跟随目标曲线运动。在PID控制信号刷新之前,控制器会预先计算出目标的速度和加速度,不必等待PID对实际位置误差的响应,直接输出信号控制油缸位置。最终使系统响应更快,控制精度更高,且没有超调和震荡。搭建的逼喘实验器系统仿真模型如图4所示。
3 逼喘实验器系统仿真与分析
设定液压系统中的各项参数,并进行仿真,其具体参数设置为:
(1) 柱塞泵的排量为15 L/min,蓄能器的容积为10 L,蓄能器的充气压力为12 MPa。
(2) 伺服油缸活塞直径40 mm,活塞杆直径28 mm。
(3) 注射油缸活塞直径35 mm,活塞杆直径25 mm。
经典PID控制算法中,要想无超调地跟踪预设目标曲线,须经多次试验调出最优PID参数,试验曲线如图5所示。从图5中曲线可以看出,伺服油缸在0.3 s收到注油信号后,在0.188 s后位移量达到精度要求,油缸位移为129.805 mm,其中燃油注射器内径为35 mm,换算可知燃油注射量为124.887 mL,燃油注射精度为0.09%。
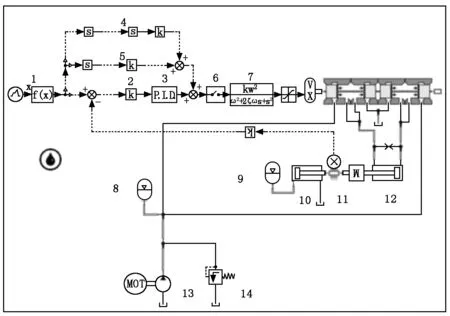
1-输入信号;2-放大器;3-PID控制器;4-加速度前馈控制器;5-速度前馈控制器;6-采样开关;7-伺服比例阀;8,9-蓄能器;10-注射油缸;11-位移传感器;12-伺服油缸;13-油泵电机组;14-溢流阀图4 逼喘实验器仿真模型

图5 经典PID控制的伺服油缸位移曲线
为提高系统响应时间,加入速度前馈和加速度前馈对系统进行校正,试验曲线如图6所示。从图6中曲线可以看出,伺服油缸在0.3 s收到注油信号后,伺服油缸在0.151 s后位移量达到精度要求,油缸位移为129.831 mm,换算可知燃油注射量为124.911 mL,燃油注射精度为0.07%。

图6 加入前馈控制器的伺服油缸位移曲线
4 逼喘实验器与实验结果
在该逼喘实验器与飞机发动机联机后,进行注油实验,实验器安装如图7所示。将速度前馈、加速度前馈、比例、积分、微分的放大倍数调整为Kfv=0.06、Kfa=0.009、Kp=3、Ki=0.2、Kd=0时,实测液压缸位置曲线如图8所示,伺服油缸在0.157 s后位移量达到精度要求,油缸位移为129.828 mm,换算可知燃油注射量为124.910 mL,燃油注射精度为0.07%。逼喘实验器性能指标满足实验要求,且与仿真分析基本一致。

图7 实验器安装图

图8 液压缸位置实测曲线
5 结论
利用AMESim仿真软件对逼喘实验器位置控制系统进行建模和仿真可以看出:对于闭环位置控制系统,要想提高系统的响应时间又不产生超调和震荡,可以加入速度前馈与加速度前馈环节,从仿真曲线上可以看出,改善后的控制效果比较明显。逼喘实验器的成功设计、制造,对后续相关实验器设计、加工和制造具有一定的指导意义。
