核环境机器人电液比例位置系统动态特性分析*
2021-03-18王晔晗邹树梁朱平平
王晔晗,邹树梁,朱平平
(1.南华大学 机械工程学院,湖南 衡阳 421001;2.核设施应急安全技术与装备湖南省重点实验室,湖南 衡阳 421001)
0 引言
从三哩岛核事故到切尔诺贝利核事故再到福岛核事故,核环境机器人的使用具有重大价值已成为人们的共识[1,2]。核环境机器人面临地形复杂难测、作业任务多种多样的挑战[3]。近年来,电子技术、计算机技术、液压控制技术不断进步,促使电液比例技术在实际工程中的应用越来越广泛[4-6]。针对中低辐射水平的核事故应急与核设施退役场景改造的某一型号核环境机器人以SWE-18为原型机,不仅加装了抑尘装置和屏蔽驾驶舱,更主要的是进行了电液比例改造,使得改造后的核环境机器人可实现人工驾驶和1 000 m远程遥控两种工作模式[7,8]。由于改造后的电液比例位置控制系统的动态特性直接影响核环境机器人的工作性能,为提升机器人在核环境中的运动表现,急需分析改造后液压系统的动态特性。
1 模型建立与仿真
电液比例位置PID控制系统主要由信号源、比例放大器、电液比例阀、液压缸、负载和位移传感器组成。按照建立系统模型草图、元件赋予首选子模型、参数设置3个步骤完成AMESim系统模型的搭建并开展仿真研究,建立的基于PID反馈的电液比例位置系统模型如图1所示。
1.1 参数设置
基于PID反馈的电液比例位置系统主要液压元件的参数设置如表1所示。

表1 电液比例位置系统主要液压元件的参数设置
1.2 仿真分析
在仿真系统中,仿真时间设置为10 s,仿真时间间隔设置为0.01 s,对比例阀阀芯和液压缸活塞杆的位移及液压缸无杆腔的流量、压力特性进行仿真分析研究。得到的比例阀阀芯位置系数(比例阀阀芯实际运动在比例阀阀芯总运动行程中的占比,正向为伸出,负向为回缩)曲线如图2所示,液压缸活塞杆实际位移与期望位移曲线如图3所示。由图2和图3可知:比例阀阀芯的运动曲线随着期望位移的变化而变化,在0 s~1 s时,期望位移输出的电信号为0,比例阀的阀芯静止不动;在1 s~4 s时,期望位移输出的电信号不断上升,阀芯的位移也不断上升;在4 s~6 s时,期望位移输出的电信号保持不变,阀芯反向运动,在6 s末阀芯回到初始位置;在6 s~8 s时,期望位移输出的电信号不断减小,阀芯继续反向运动,阀芯的位移不断增加;在8 s~10 s时,期望位移输出的电信号保持不变,阀芯的位移正向移动,返回至阀芯初始位置,并保持不变。

图2 比例阀阀芯位置系数曲线
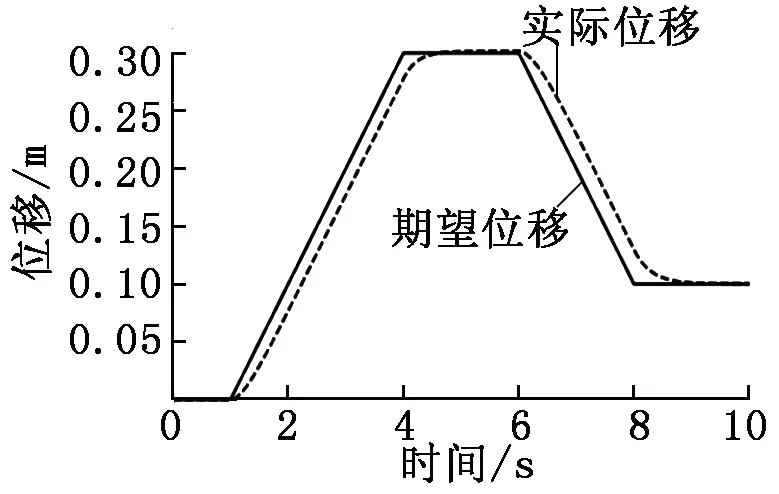
图3 液压缸活塞杆实际位移与期望位移曲线
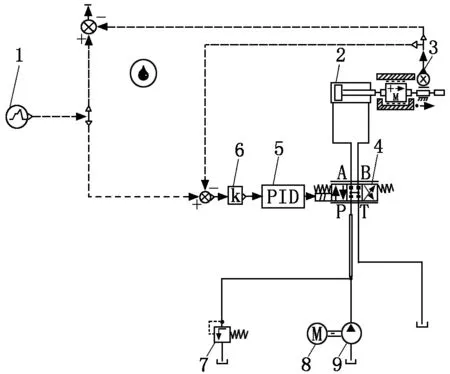
1-信号源;2-液压缸;3-位移传感器;4-电液比例阀;5-PID;6-比例放大器;7-溢流阀;8-电动机;9-液压泵图1 基于PID反馈的电液比例位置系统模型
2 系统动态特性分析
根据建立的系统模型,采用单一变量法研究参数的变化对系统动态特性的影响。本文主要研究电液比例阀和液压动力元件的阻尼比和固有频率对系统动态性能的影响。
2.1 比例阀的阻尼比对系统动态特性的影响
将比例阀的阻尼比分别取0.8、10、30和50,其他变量参数值保持不变进行仿真批处理,得到比例阀阀芯位置系数曲线、液压缸活塞杆位移变化曲线、液压缸无杆腔流量和压力变化曲线,如图4所示。
由图4可知:随着比例阀阻尼比的不断增大,阀的响应速度不断变慢,阀芯位移、液压缸无杆腔的流量和压力变化曲线愈发振荡,活塞杆运动变化曲线跟踪效果变差。
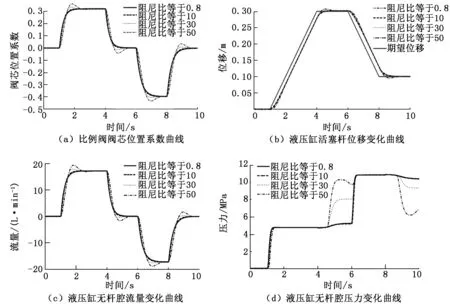
图4 不同比例阀阻尼比下的系统动态特性
2.2 比例阀的固有频率对系统动态特性的影响
将比例阀的固有频率分别取8 Hz、80 Hz、200 Hz和500 Hz,其他变量参数值保持不变进行仿真批处理,得到比例阀阀芯位置系数曲线、液压缸活塞杆位移变化曲线、液压缸无杆腔流量和压力变化曲线,如图5所示。
由图5可知:不同比例阀固有频率下的系统动态特性曲线基本重合,无明显振荡和偏移,说明比例阀的固有频率对电液比例位置控制系统动态特性的影响很小,至少在同一数量级范围内变化时对电液比例位置控制系统的动态特性几乎没有影响。
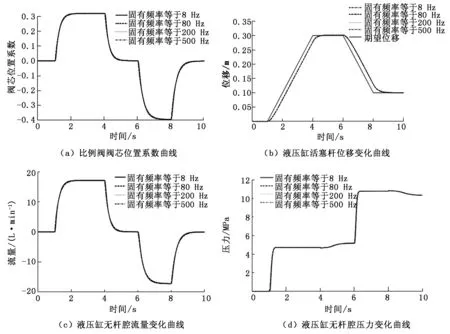
图5 不同比例阀固有频率下的系统动态特性
2.3 液压动力元件的阻尼比和固有频率对系统动态特性的影响
液压动力元件的固有频率ωh和阻尼比ζh计算公式为:
(1)
(2)
其中:A1为液压缸的有效作用面积;βe为液压油体积弹性模量;m为负载质量;Vt为液压缸的等效总容积;kce为总流量-压力系数。
由式(1)、式(2)可知:适当增大液压缸的有效作用面积A1,能够提高固有频率ωh,但减小了阻尼比ζh;适当增大负载的质量m,能够提高阻尼比ζh,但减小了固有频率ωh;适当提高液压油体积弹性模量βe、减小液压缸的等效总容积Vt对增大系统动力元件的固有频率ωh、阻尼比ζh均是有益的。
在工程实际中,一般通过缩短阀与缸之间管道的长度来降低Vt,此处研究增大液压油体积弹性模量βe对系统动态特性的影响。将液压油体积弹性模量分别取700 MPa、1 200 MPa、1 500 MPa和1 700 MPa,其他变量参数值保持不变进行仿真批处理,得到比例阀阀芯位置系数曲线、液压缸活塞杆位移变化曲线、液压缸无杆腔流量和压力变化曲线,如图6所示。

图6 不同液压油体积弹性模量下的系统动态特性
由图6可知:液压油的体积弹性模量在标准范围内对比例阀阀芯位置系数曲线、液压缸活塞杆位移变化曲线、液压缸无杆腔流量变化曲线几乎没有影响;液压缸无杆腔的压力随着液压油体积弹性模量βe的减小而产生了偏移,所以在电液比例系统的工作及平时的维护过程中,应该采取各种措施减少空气、水、灰尘等物质混入液压油液中,避免液压油体积弹性模量的减小。
3 结论
本文基于AMESim对核环境机器人电液比例位置系统的动态特性进行分析,可以得出以下结论:改变比例阀的阻尼比对系统的影响较大,随着比例阀的阻尼比的增大,系统的振荡增大,响应速度变慢,选用阻尼比为0.8左右的比例阀可提升系统的动态特性;增大液压油的体积弹性模量、缩短阀与缸之间管道的长度可以增大液压动力元件的阻尼比和固有频率,从而改善系统的动态性能。
