天基卫星智能通用弹射系统设计与控制
2021-03-18唐寅峰杨靖宇张峻渤
唐寅峰,杨靖宇,张峻渤
(1.沈阳航空航天大学 智能飞行器系统理论与技术实验室,沈阳 110136;2.沈阳戈达德智能装备科技有限公司 研发部,沈阳 110001)
能源问题是当今世界发展的一个主要问题,如今人们主要消耗不可再生资源,但地球能源储备逐年减少,而需求却在增加,这加剧了供需矛盾[1-2]。此外还伴随着环境问题,所以建立清洁绿色的新能源体系意义重大。然而目前新能源都存在不稳定、数量有限等问题,为此地面太阳能和空间太阳能受到人们的关注,空间太阳能相比地面太阳能具有日照时间长、能流密度高、持续稳定等优点[3],经计算,空间太阳能光照总量是地面太阳能光照总量的5倍以上[4-5],而开发空间太阳能需要空间太阳能电站,因此空间太阳能电站技术有着更好的发展前景[6]。早在1968年,Glaser P就在Science发表的文章中第一次详细论述了发展空间太阳能电站的必要性、可行性,并提出了空间太阳能电站的设计思想[7]。美国是最早启动空间太阳能电站研究的国家,在20世纪70年代和 90 年代,爆发了几次国际能源危机,美国都资助了空间太阳能电站的研究项目[8]。国内科学家也启动了发展空间太阳能电站技术的计划。2018年12月6日,我国在重庆璧山区启动建设首个空间太阳能发电站实验基地,在36 000千米外的太空建兆瓦级太阳能发电站,计划在2021年至2025年太阳能电站建成并发电,2025年后开始大规模空间太阳能电站系统相关工作[9-10]。随着进入太空的航天器越来越多,太空垃圾问题将日益突出。科学家预测:如果制造太空垃圾的速度以每年2%~5%的速度继续增长下去,到2300年,任何航天器都将无法再进入太空轨道。现如今,科学家们为解决太空垃圾问题,提出了几种应对方式:(1)用微型卫星清理;(2)用机器人卫星捡拾;(3)以微小卫星作为基础,配合机械臂捕捉;(4)“壁虎漫步”机器人清理[11-13]。无论用什么方式都需要将清理装置送到预定轨道,而单独发射微小型清理卫星所需成本太高,可通过空间太阳能电站携带进入太空,进入太空后进行弹射分离,且太空环境中还存在其他航天器,空间太阳能电站也可以发射子卫星来保护自己,且子卫星还可以进行一些太空实验。
本文以空间太阳能电站为载体,提出天基卫星智能通用弹射系统平台设计方案,一方面用于弹射微小型卫星或机器人卫星清理太空垃圾,另一方面用于空间太阳能电站弹射子卫星来保护自己,或弹射子卫星进行一些太空实验。采用可折叠自由组合式的方法设计智能弹射器,根据发射对象将各装置进行自由组合,实现尺寸可调、弹射动力可变,从而满足不同的发射要求。设计的可折叠自由组合式智能弹射器也适用于海基智能弹射系统,用于舰载无人机的发射。基于空间太阳能电站协同控制实验平台,建立空间太阳能电站动力学方程,建立仿真控制系统;结合双环滑模变结构控制方法设计空间太阳能电站协同控制器。仿真结果表明:采用双环滑模变结构控制方法可有效对空间太阳能电站姿态进行精准控制,可以消除弹射系统对空间太阳能电站的姿态影响。
1 天基卫星智能通用弹射系统设计
设计了一种一阶或N阶可折叠自由组合式智能弹射器,由运载小车、弹射装置、传动装置、动力装置和双安全缓冲装置组成,整个智能弹射器结构组成如图1所示。
采用可折叠自由组合式的方法设计智能弹射器,根据发射对象将各装置进行自由组合,使其达到弹射环境多样化、弹射场地多样性,克服传统的弹射装置尺寸固定、发射动力有限等问题,实现尺寸可调、弹射动力可变,从而满足不同的发射要求。如图2所示为一阶可折叠自由组合式智能弹射器,图3为四阶可折叠自由组合式智能弹射器。
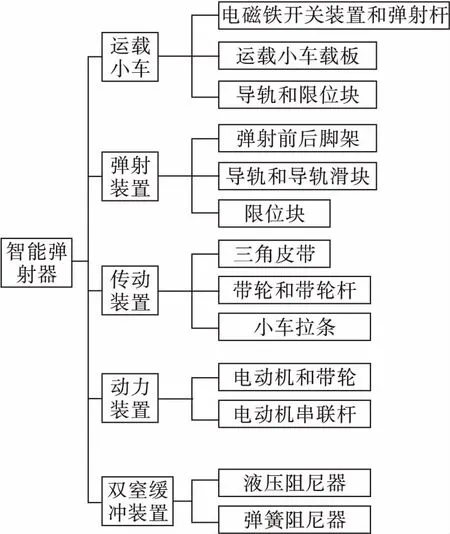
图1 智能弹射器结构装置图
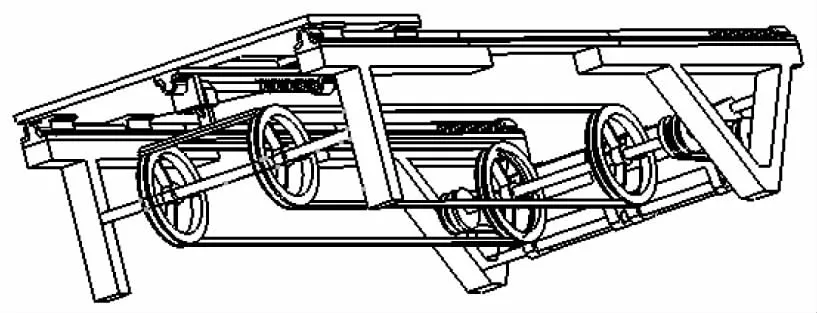
图2 一阶可折叠自由组合式智能弹射器

图3 四阶可折叠自由组合式智能弹射器
可折叠自由组合式智能弹射器的一阶弹射器弹射过程:检查各装置连接情况、发射弹射信号、电磁铁和交流电动机通电、电磁铁闭合、交流电动机正转。动力装置通过连动皮带带动传动装置正转,传动装置通过三角皮带带动小车拉条正转。当转速达到发射速度,给电磁铁开关装置发射信号,电磁铁开关装置分离,分离的电磁铁开关装置带动弹射杆向前运动并与小车拉条相扣,小车拉条带动弹射杆向前运动,弹射杆带动分离的电磁铁开关装置向前运动。分离的电磁铁开关装置触发弹簧阻尼器,弹簧阻尼器吸收动能,弹簧阻尼器释放动能给弹簧阻尼器限位块,弹簧阻尼器限位块带动运载小车载板向前运动,进而加速运载小车载板上的弹射对象。当运载小车载板到达液压阻尼器,弹射杆与小车拉条分离,液压阻尼器减速运载小车载板,并使运载小车载板停止运动,同时运载小车载板上的弹射对象被弹射出去;然后,通过开关控制交流电动机进行低速反转,进而弹射杆与小车拉条相扣,运载小车载板向后运动到达初始位置,弹射杆与小车拉条再次分离,运载小车载板和电磁铁复位,断电,弹射完成。
四阶智能弹射器与一阶智能弹射器原理相同,这里就不做阐述。同理可得N阶可折叠自由组合式智能弹射器。
2 天基卫星智能通用弹射系统控制研究
2.1 天基智能弹射系统控制研究
可折叠自由组合式智能弹射器适用于天基智能弹射系统。随着航天技术的进步,为了很好地开发利用太阳能,发射空间太阳能电站成为必然趋势。由于太空环境中存在太空垃圾和其他航天器,空间太阳能电站就有必要携带子卫星进入太空,用以清理太空垃圾以保护空间太阳能电站,且还可以进行一些太空实验。在子卫星进入太空后进行弹射分离,但在弹射分离时,空间太阳能电站的姿态会受到弹射系统的影响。
为了消除弹射系统发射子卫星时对空间太阳能电站姿态的影响,对空间太阳能电站的姿态控制采用双环滑模变结构控制方法。首先,基于空间太阳能电站协同控制实验平台,建立空间太阳能电站动力学方程、运动学方程并结合滑模控制算法。建立仿真控制系统。然后,结合双环滑模变结构控制方法设计空间太阳能电站协同控制器并进行姿态控制仿真。
空间太阳能电站姿态的动力学方程可以表示为[14-15]

(1)
式中,J∈R3×3为空间太阳能电站在机体坐标系绕质心旋转的转动惯量矩阵,ΔJ为该惯量矩阵的由于空间太阳能电站发射子卫星重量变化等原因引起的不确定项,ω=[ωxωyωz]T为空间太阳能电站绕自身机体坐标系的角速度,M=[mxmymz]T为定义在机体坐标系中的控制力矩,D=[dxdydz]T为空间太阳能电站的外部干扰项。矩阵J、ΔJ和Ω分别如式(2)所定义:
(2)
当空间太阳能电站按照先俯仰再偏航,最后滚转的次序绕其质心旋转时,空间太阳能电站的姿态角动力学方程为θ′=R(θ)ω,其中θ=[γψφ]T为空间太阳能电站的欧拉角,γ为滚转角,ψ为偏航角,φ为俯仰角。则R(θ)矩阵由式(3)确定:
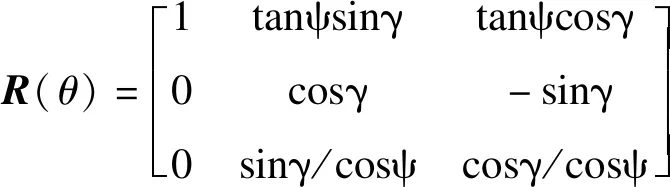
(3)
采用双环滑模变结构控制方法设计空间太阳能电站的控制律,外环为姿态环,内环为角速度环,外环滑模控制律实现欧拉角θ的跟踪。在输入为目标姿态角θc时,外环控制器产生姿态角速度指令ωc,并传递给内环系统,内环则通过内环滑模控制律实现对姿态角指令ωc的跟踪,从而实现目标姿态角θc,当实时欧拉角θ没达到θc时,则输入θc-θ,进而实现目标姿态角θc。
采用积分滑模面设计外环滑模函数为:

(4)
其中K1=diag{k11,k12,k13}≻0为增益矩阵,通过选择合适的增益矩阵可以使系统的跟踪指令偏差在一个比较理想的滑模面上滑动至稳定。取姿态角速度指令ωc作为姿态角速度ω跟踪的虚拟控制项。取θ′=R(θ)ωc,其中ωc与ω之间的误差通过内环控制来消除,设计外环虚拟控制如式(5)所示。
(5)
其中ρ1>0,SGN(sw)=[sgn(s1)sgn(s2)sgn(s3)]T。
采用积分滑模面设计内环滑模函数即公式(6),其中ωe为目标角速度与实时角速度的误差即ωe=ωc-ω,同样增益矩阵为K2=diag{k21,k22,k23}。
(6)
设计内环滑模控制律为:
(7)
其中ρ2>0,μ>0。
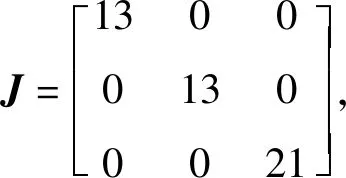

图4 实时欧拉角与目标欧拉角
实验表明采用双环滑模变结构控制方法可对空间太阳能电站姿态进行有效精准控制,设计的双环滑模变结构控制律对弹射系统弹射时空间太阳能电站的外部扰动具有很好的鲁棒性,空间太阳能电站的姿态可在短时间内达到所期望的稳态,进而消除弹射系统对空间太阳能电站的姿态影响。
2.2 海基智能弹射系统动力学分析
可折叠自由组合式智能弹射器适用于海基智能弹射系统,可用于舰载无人机的发射。下面进行舰载无人机的动力学分析,弹射开始时,无人机以及小车系统速度为零,接收弹射指令后,动力装置通过传动装置开始为小车系统和舰载无人机加速。当舰载无人机的速度达到起飞速度,舰载无人机脱离小车系统完成起飞,随后小车系统通过双安全缓冲装置减速而停止运动。接收小车系统复位指令,小车系统复位,为下一次弹射做准备。
为了简化模型,将整个过程分为两段,第一段是小车系统和无人机一起做加速运动,即传动装置推力、无人机发动机推力克服小车系统滑动轴承与导轨之间的摩擦力、无人机的气动阻力所做的功转化为无人机与小车系统的动能、重力势能。第二段是无人机脱离小车系统后小车系统做减速运动,即小车系统的动能转化为液压阻尼器减速的阻尼力、小车系统滑动轴承与导轨之间的摩擦力所做的功和小车系统的重力势能。
第一段加速运动的动力学公式如式(8)所示。
(8)
转化为
(9)
第二段减速运动的动力学公式如式(10)所示。
(10)
转化为
(11)
其中F包括传动装置的推力以及无人机自身的推力,m为小车系统与无人机的质量,θ为发射角即发射导轨与舰船甲板的角度,μ为滑块与导轨之间的动摩擦因子,f为液压阻尼器减速的阻尼力,m2为小车系统的质量,s1为第一段位移,s2为第二段位移。
一阶和四阶可折叠自由组合式智能弹射器运载小车系统质量分别为5 kg和20 kg,发射角θ为6°,动摩擦因子μ取值0.06。由于可弹射无人机型号较多,一阶可折叠自由组合式智能弹射器取质量为15 kg起飞速度为10 m/s的A型舰载无人机的弹射过程进行动力学分析;四阶可折叠自由组合式智能弹射器取质量为30 kg起飞速度为20 m/s的B型舰载无人机的弹射过程进行动力学分析,如图5~8所示。
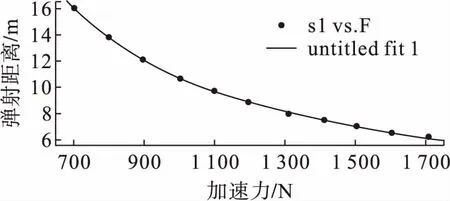
图6 B型舰载无人机加速力-弹射距离图
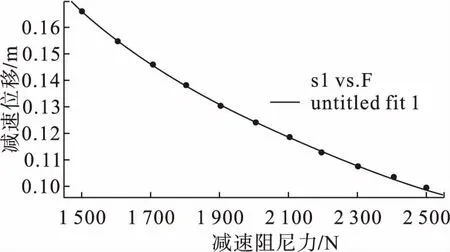
图7 A型舰载无人机减速阻尼力-减速位移图
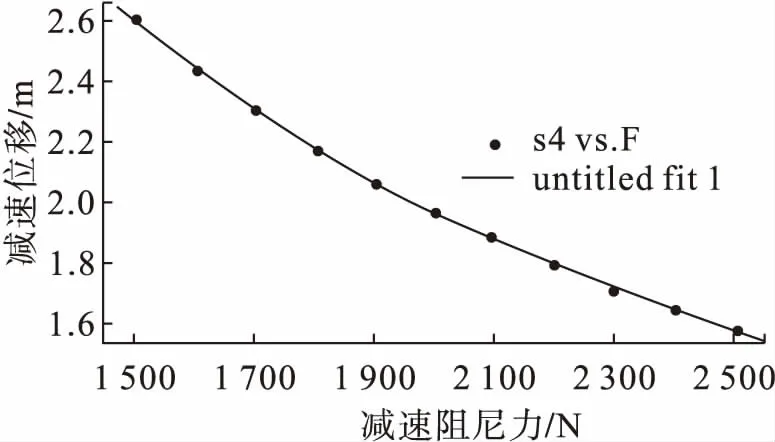
图8 B型舰载无人机减速阻尼力-减速位移图
结果显示:海基智能弹射系统可弹射质量15~30 kg 起飞速度10~20 m/s的多型号舰载无人机,且智能弹射器的尺寸在3~20 m之间。
3 结论
(1)天基卫星智能通用弹射系统适用于空间太阳能电站弹射微小型卫星和机器人卫星清理太空垃圾、空间太阳能电站弹射子卫星保护自己、空间太阳能电站弹射子卫星进行一些太空实验、舰载无人机的弹射起飞。
(2)双环滑模变结构控制方法可对空间太阳能电站姿态进行精准有效控制,可以消除弹射系统对空间太阳能电站的姿态影响。
(3)海基智能弹射系统可弹射质量15~30 kg起飞速度10~20 m/s的多型号舰载无人机,且智能弹射器的尺寸在3~20 m之间可调。
