卫星固定站天线控制系统改造的探讨
2021-03-17陈涛,徐平
陈 涛,徐 平
(1.南京熊猫汉达科技有限公司,江苏 南京 210004;2.中国卫通集团股份有限公司,北京 100094)
随着卫星通信高速的发展,它从一个异乎寻常的备选手段发展为主流传输技术,通过通信卫星进行中继,卫星通信不受距离限制,可广泛用于传输语音、视频和数据等通信业务,随时随地向用户提供高质量、高可靠通信服务。
卫星固定站是卫星通信系统中的一种重要站型,它站址固定通过同步静止轨道卫星接入整个卫星通信网络,建立与网内其他站点的通信连接。卫星固定站静中通天线口径在2.4m-3m之间,一般采用环焦天线,其日常的性能直接影响卫星固定站的通信效果和传输质量。初期的大部分天线特别是口径在2.4m-5m之间的天线都未安装天线自动控制系统,而是靠人工手动调整驱动电机进行对星,严重影响了卫星固定站天线跟踪对准通信卫星的精准度,操作相对复杂。
本文对Ku频段卫星固定站天线控制系统改造进行探讨,提出更好的改造方案。改造后的天线控制系统将控制与驱动电路高度集成,以DSP为核心进行天线位置检测和控制,通过继电器驱动交流电机,支持本地及远程控制。改造后的卫星固定站天线可通过天线自动控制系统进行实时的天线跟踪,无需人为干预。
1 原卫星固定站组成
卫星固定站的组成,简单来说包括:天线单元、射频设备单元、信道设备单元、终端设备单元、监控设备单元、电源设备单元等。如图1所示。
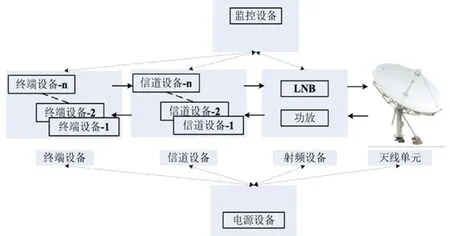
图1 卫星固定站组成
天线单元组成如表1所示。
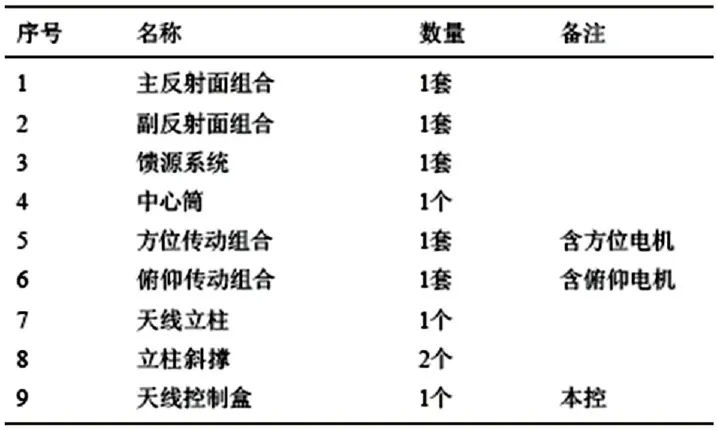
表1 天线单元组成
⊙主反射面组合是由中心筒(馈源系统安装在内)、若干单片面板和若干辐射梁、支架组装而成。
⊙天线副面组合由若干副面支撑杆、支架、副面和若干调节丝杆组成。
⊙馈源系统包括波导、喇叭、双工器、活动法兰。
⊙中心筒对上连接天线反射面、对下连接天线座架。
⊙方位传动组合主要为方位调节丝杆、方位电机,丝杆采用钢板焊接件,安装时直接与基座固定。
⊙俯仰传动组合主要为俯仰调节丝杆、俯仰电机,丝杆为钢板焊接件,安装时直接与天线立柱固定。
⊙天线立柱为圆筒结构,对上通过钢板焊接与中心筒相连,对下立柱管身上通过钢板焊接与立柱斜撑及方位转动座相连。
⊙立柱斜撑作用是对天线立柱进行支撑,由两根撑腿组成,每根撑腿是通过钢管与钢板熔接而成。
⊙天线控制盒由本控开关、方位继电器、俯仰继电器以及 380VAC的空气开关组成。天线单元组成具体如图 2所示。
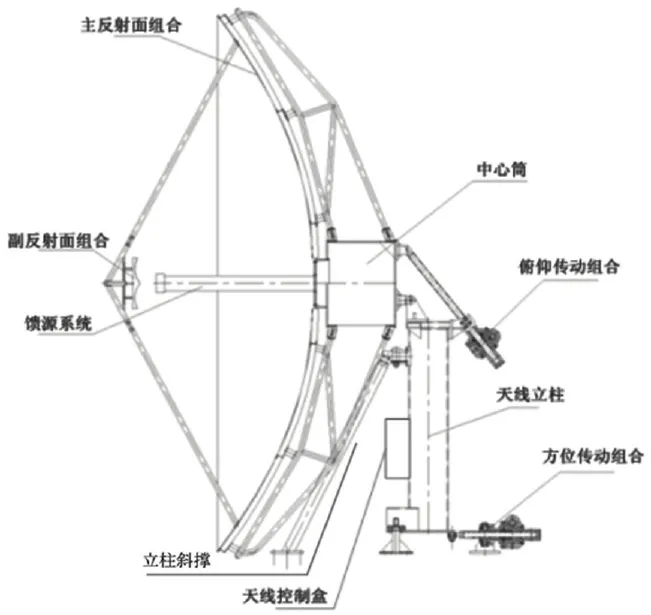
图2 卫星固定站天线单元组成
卫星固定站天线单元与其他设备及天线控制系统的连接关系根据图 3所示。采用三相五线制 380VAC电源通过继电器来控制方位与俯仰电机带动相应丝杆进行天线位置的调整。
2 卫星固定站天线控制系统改造
原卫星固定站的天线单元能够满足在一定专业水平的人员操作下借助专业仪器、仪表进行天线的对星操作。操作人员在实际使用中存在相当多不便之处:
⊙无界面明确显示当前天线状态及参数,影响操作人员对天线的状态判断和操作。
⊙无自动跟踪功能,无法精确对星,需要专业技术人员干预且借助专业仪器、仪表。
⊙一旦遇到换星等需要天线大范围转动时,操作耗时耗力,且转动精度不够。
为改善以上缺点,对天线控制系统进行改造,改造后的天线控制系统可直观显示天线状态及参数,并可远程自动控制天线,根据反馈的信号电平值实现实时自动跟踪且可存储多颗卫星天线位置,实现自动换星对星。
天线单元改造组成如表 2所示。
天线控制系统如图 4所示,天线控制系统集成控制电路、驱动电路及信标接收机。控制电路是控制中心,以 DSP芯片及相应的软件为核心,实现天线的位置检测与各种模式的控制、故障检测与保护、与站内监控设备交互等功能。
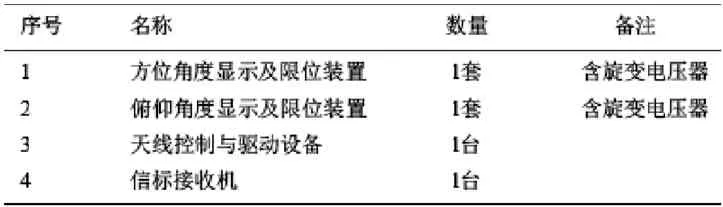
表2 天线单元改造组成
旋转变压器作为传感器输出的信号经 DSP进行A/D转换、运算处理及校正后,得到当前天线位置。该位置参数除显示外,还与天线目标位置比较,获得天线转向的具体参数。集成在驱动电路中的继电器对转向的具体信号进行放大,从而控制方位电机及俯仰电机驱动天线转动。
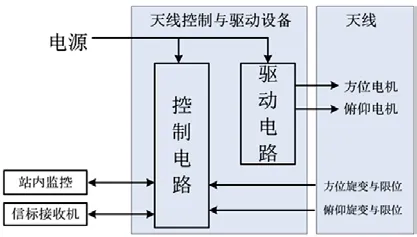
图4 天线控制系统
天线控制系统具有完善的限位、故障告警及自动保护功能。限位主要分为软限位和开关限位。故障类型有:驱动电路故障、检测位置回路故障、控制位置回路故障、交流电源不正常等。检测到限位或故障后,天线控制系统除显示报警外,会立刻采取保护措施封锁有关控制功能,确保设备及被控天线运行安全,同时上报站内监控设备,提示操作人员方便维修。

图5 改造后的卫星固定站天线单元连接关系
改造后的卫星固定站天线单元具体连接关系如图5所示。现场连接线如图 6所示。
操作人员通过天线控制系统较方便的控制天线找到目标卫星。下面分具体举例说明寻找目标卫星的天线控制方法。
(1)寻找未知信标的目标卫星,控制方法如下:
a.根据目标卫星经度,用预置卫星模式将天线转到理论位置。
b.通过仪器观察卫星信标,在无明显信号时,采用自动搜索模式大范围搜索卫星,收到信标信号后停止搜索。
c.用手控转动模式控制天线使接收信号接近最大。
d.通过仪器查找卫星信标或其他跟踪信号,调整好跟踪信号回路。
e.在参数表中设置好“跟踪信号频率”及“信号电平最大值”。
f.置步进跟踪状态使天线对准卫星。
g.退出跟踪状态,通过仪器观察信号,调整极化使接收信号最佳。
h.在卫星表中存储该卫星对应的天线位置。
(2)寻找已知跟踪信号的目标卫星,控制方法如下:
a.根据目标卫星经度,用预置卫星模式将天线转到理论位置。
b.调整好跟踪信号回路。
c.在参数表中设置好“跟踪信号频率”及“信号电平门限值”。
d.当收到的卫星信标达到预设信号电平门限值,进入自动跟踪状态;否则,通过手控转动或自动搜索模式找到卫星后,置步进跟踪状态使天线对准卫星。
e.退出跟踪状态,通过仪器观察信号,调整极化使接收信号最佳。
f.在卫星表中存储该卫星对应的天线位置。
(3)寻找已存储的目标卫星,控制方法如下:
a.根据目标卫星经度,用预置卫星模式将天线转到目标卫星位置。
b.调整好馈源极化。
c.调整好跟踪信号回路。
d.在参数表中设置好“跟踪信号频率”及“信号电平最大值”。
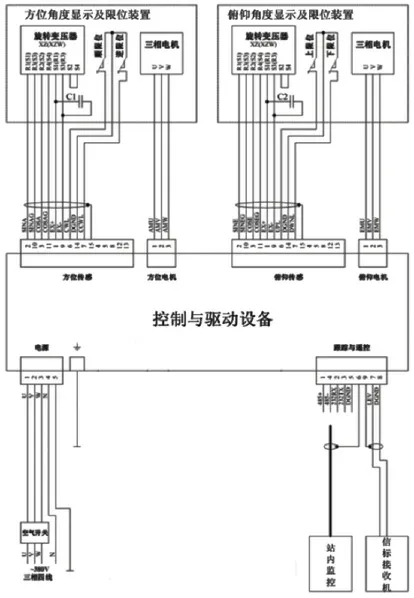
图6 现场连接线图
e.置步进跟踪状态使天线对准卫星。
3 结束语
卫星固定站天线控制系统改造后天线的操作更简便,跟踪精度更高。操作人员在室内可进行天线的控制,调整到位后,可进入自动跟踪状态实现自动操作。天线状态、天线信号出现异常时,界面自动提示操作人员。卫星通信系统固定站的业务通信保障效果在天线控制系统改造后更加稳定。
