一种基于MATLAB/Simulink 的增程器控制系统
2021-03-16谭明作
谭明作
(柳州五菱柳机动力有限公司,广西 柳州 545005)
0 引言
在实施国VI 排放标准和新阶段的油耗法规过程,国家制定了双积分政策,负积分车企将面临严厉的行政处罚。为此,各车企加速进行低能耗产品的研发,除了纯电汽车的研发,混合动力汽车也是各个车企重点研发的车型。混动汽车能显著降低整车油耗,相对于传统燃油车,节油效果超过25%。
增程式汽车是混动汽车其中的一个重要分支,增程器用于给动力电池进行能量补充或者在加速过程中对行驶功率进行能量补充,从而使车辆具备更远的续航里程和更强劲的动力体验。在增程式汽车中,最具代表性的是日本日产汽车的e-POWER 增程动力,兼顾低成本和低油耗,因而被市场广泛接受。
Simulink[1]是MATLAB 环境下的一个进行动态系统建模、仿真和综合分析的集成软件包。Simulink 的模块化设计通俗易懂、直观易学,目前被广泛用来进行汽车控制系统的模型开发。本文的增程器控制系统是基于MATLAB/Simulink 的模块化开发,主要用于协调控制发动机和发电机,确保系统稳定运行在高效的发电工况,同时兼顾控制发动机运行状态,确保发动机排放符合法规要求。
1 增程器控制系统架构
对于整车控制器(VCU:Vehicle Control Unit)来说,增程器控制系统架构可以分成两大类型,一种是集中式增程器控制,另一种则是分布式增程器控制。
对于增程器集中式控制的架构,是将增程器控制单元(RECU:Range Extender Control Unit)的功能模块集成在VCU 中,由VCU 直接对发动机控制系统(ECU:Engine Control Unit)和发电机控制器(GCU:Generator Control Unit)进行协调控制,如图1 所示。
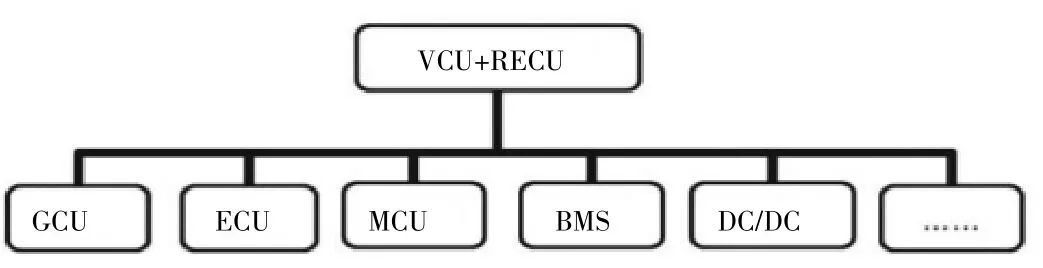
图1 增程器集中式控制架构图
VCU,Vehicle Control Unit,整车控制器;RECU,Range Extender Control Unit,增程器控制单元;GCU,Generator Control Unit,发电机控制器;MCU,Motor Control Unit,驱动电机控制器;BMS,Battery Management System,动力电池管理系统;DC/DC,高低压直流转换器。
对于增程器分布式控制的架构,VCU 是单纯的整车控制单元,没有将RECU 功能模块放入其中。VCU 不直接对ECU 和GCU 进行协调控制,只需根据车辆状态,对RECU 提出功率需求,由RECU 根据VCU 的功率需求,对GCU 和ECU 进行协调控制,如图2 所示。
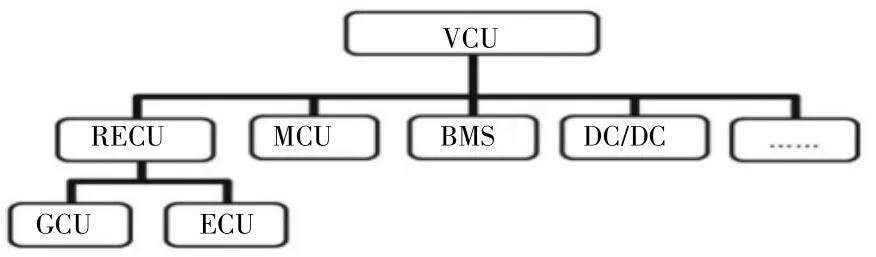
图2 增程器分布式控制架构图
本文的增程器系统架构采用分布式控制。采用分布式控制的增程器控制系统,能有效降低VCU 的软件开发难度,提高了增程器产品的匹配开发效率。
2 RECU 的模型开发
RECU 模型是基于MATLAB/Simulink 的模块化开发,由CAN_Input_Interface、Range_Extender_Control 和CAN_Output_Interface 三个大模块构成。
2.1 CAN_Input_Interface 模块
CAN_Input_Interface 模块是信号输入模块,用于接收VCU、ECU 和GCU 相关的信息,如VCU 的充电请求、功率请求、增程器运行请求等;ECU 的发动机水温信息、发动机转速信息、发动机扭矩信息、发动机故障信息、发动机扭矩限值信息、发动机的喷油状态等;GCU 的发电机温度信息、发电机电流信息、发电机电压信息、发电机转速信息、发电机扭矩信息、发电机故障信息、发电机扭矩限值信息等基础输入信息,如图3 所示。
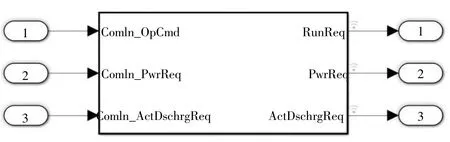
图3 CAN_Input_Interface 的VCU 信息输入模块
Range_Extender_Control 模块根据这些基础输入信息,来对增程器系统进行协调控制。
2.2 Range_Extender_Control 模块
Range_Extender_Control 模块是增程器控制系统的核心模块,用于对子部件的故障信息进行处理,对VCU的功率请求进行计算,对增程器状态机进行控制,根据功率需求对ECU 和GCU 进行扭矩协调等。
2.2.1 故障信息处理
RECU 根据ECU 和GCU 上传的故障信息,根据约定规则进行分类转化后,分成一级故障、二级故障和三级故障。当系统处于一级故障时,RECU 需要采取停机措施,以保护安全或者保护硬件,同时上传故障信息给VCU;当系统处于二级故障时,RECU 采取限制功率保护,同时上传故障信息;当系统处于三级故障时,RECU只上传故障信息给VCU,不做其他限制动作。故障信息处理模块如图4 所示。
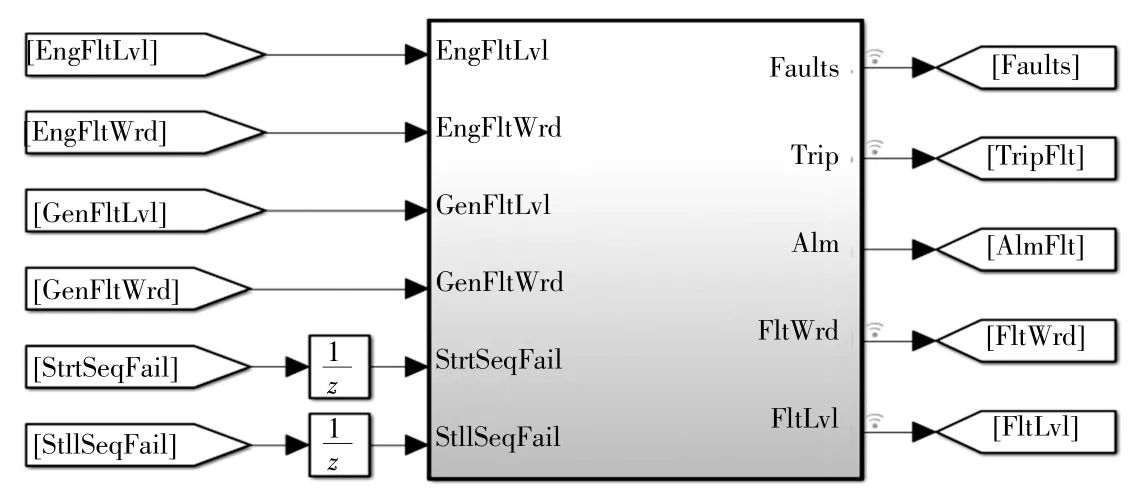
图4 故障信息处理模块
2.2.2 增程器发电功率处理及运行转速控制
根据VCU 向增程器发出的功率需求,RECU 需要结合当前发动机水温状态、机械功率补偿、系统功率限值、功率增减斜率等因素,进行综合计算处理,最终生成增程器的发电功率指令RECU_Pwr_Cmd,计算处理过程,如图5 所示。
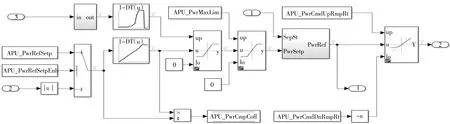
图5 RECU 对VCU 需求功率的计算处理
在得到发电功率指令后,经过查表,就可以得到增程器最优的工作点,此时的工作点是在该发电功率之下系统最经济的运行点,具备最低的燃油消耗率。在这个计算环节中,我们运用StateFlow[2]对增程器状态进行处理,最终输出对增程器的转速控制指令Spd_Cmd,如图6 所示。
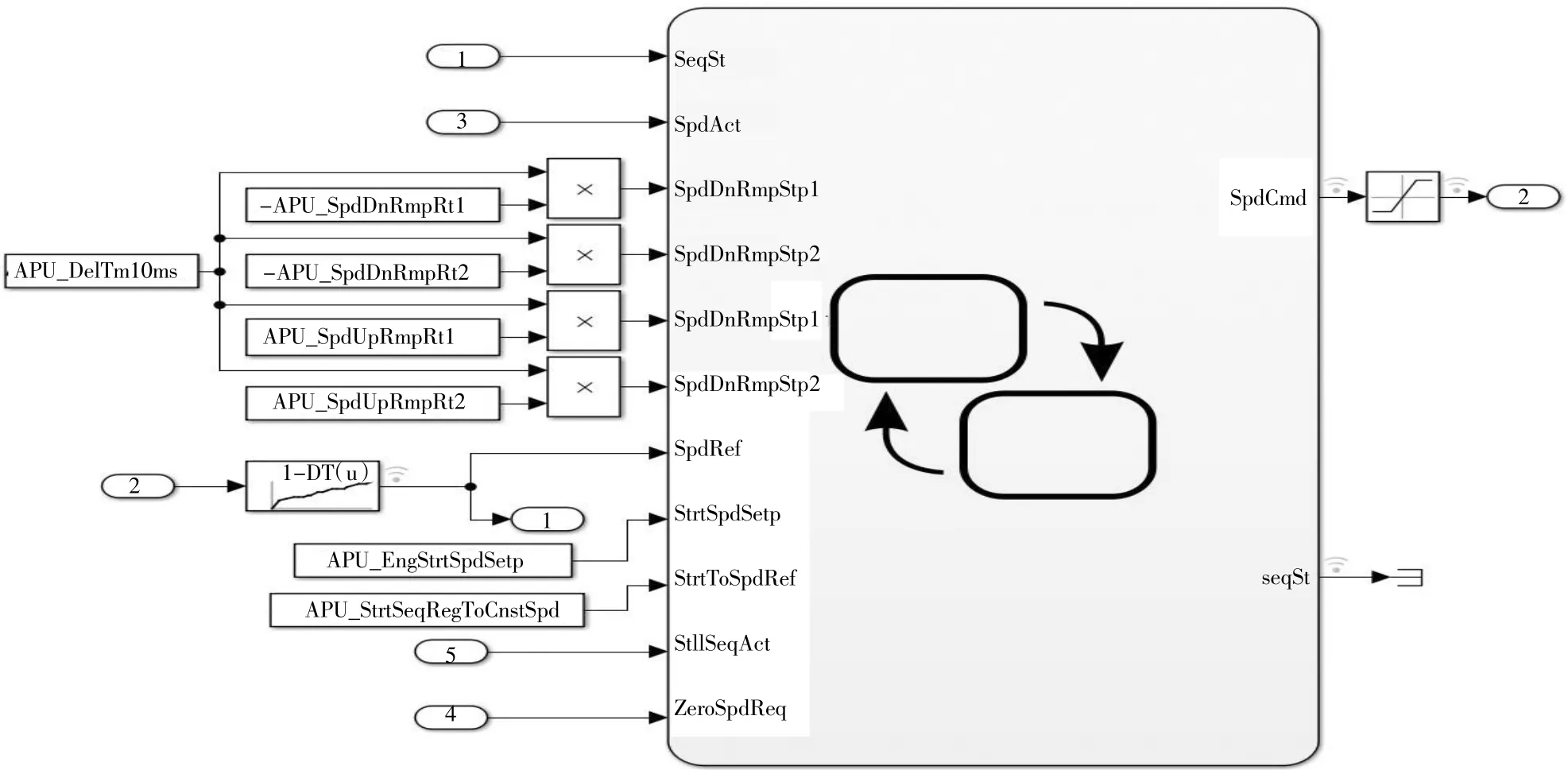
图6 RECU 根据功率计算转速指令
2.2.3 增程器扭矩协调控制
根据前面计算处理得到的发电功率指令RECU_Pwr_Cmd 和转速控制指令Spd_Cmd,RECU 结合ECU、GCU 相关的扭矩限制条件,以及保证增程器扭矩变化平稳过渡,使增程器运行稳定为目标,经过综合计算处理后,得出发动机的运行扭矩指令Eng_Trq_Ref。RECU 根据发动机运行扭矩指令Eng_Trq_Ref 和转速控制指令Spd_Cmd,通过PID 控制器,对发电机的发电扭矩进行闭环控制,从而使增程器最终实行VCU 的功率需求响应。RECU 对发动机运行扭矩的计算,如图7 所示。
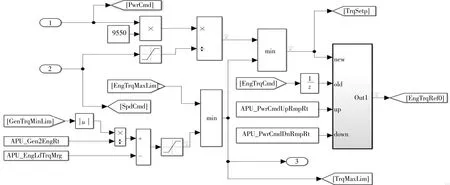
图7 RECU 对发动机运行扭矩进行计算
2.3 CAN_Output_Interface 模块
经过Range_Extender_Control 模块的运算处理和协调控制后,向CAN_Output_Interface 模块输入基本控制信息和状态信息。CAN_Output_Interface 模块对这些控制信息和状态信息进行再次处理后,分别向VCU、ECU 和GCU输出相应的状态信息和控制指令,从而完成对发动机与发电机的协调控制,让增程器按照VCU 的功率需求进行发电,并使增程器运行在最经济的工作状态。CAN_Output_Interface 模块的信号输出处理,如图8所示。
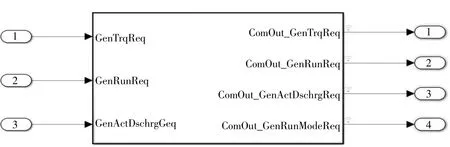
图8 CAN_Output_Interface 的GCU 控制信号输出模块
3 RECU 集成与应用
基于GCU 强大的硬件资源,经过系统计算,GCU 的芯片能力和存储空间均满足RECU 的需求。在对GCU的BSW(Basic Software)进行相应的匹配开发后,基于MATLAB/Simulink 模型化开发的RECU 模型可以很好的移植并集成到GCU 中。经过Tasking 编译生成的RECU 软件代码,能友好的刷写入GCU,顺利完成标定和调试。
该增程器控制系统运用于某新型增程车,并进行油耗和排放测试,排放结果符合国六法规要求,油耗结果为5.09 L/100 km,相对该车型的传统燃油车油耗(6.9 L/100 km),节油率达26.2%,具有显著的节能效果。
4 结论
成功开发的基于MATLAB/Simulink 模型化开发并集成于电机控制器的增程器控制系统具有可读性强、移植性好、集成度高、硬件综合成本低等优点。该系统在协调控制发动机时采用扭矩控制方式,控制精度高、控制响应快等,使增程器总成始终处于最经济的工作状态,有效降低燃油消耗,排放符合国VI 标准。该系统可为混动汽车的开发设计提供参考。