基于VisualOne 的柔性制造系统智能工厂的研究与设计
2021-03-16刘彩霞王慧东
刘彩霞,王慧东
(包头职业技术学院数控技术系,内蒙 古包头 014030)
0 引言
随着“中国制造2025”的不断深入发展,智能制造也渐渐被大家耳熟能详。智能制造系统是包括智能装备(数控机床、机器人及其他自动化设备)、工业互联网(传感器、机器视觉、RFID、工业以太网)、工业软件(ERP、MES、DCS 等)、3D 打印以及将上述环节有机结合的自动化系统集成及生产线集成。我国在逐步提升工业水平,并正处于制造业的转型升级阶段。工业自动化已经成为势不可挡的发展趋势,很多工厂已经拥有无人车间或只需要少量的人力就可以做很多的工作大型生产线。为了在制造业转型升级中寻求新的突破,我国一直积极发展工业机器人技术。机器人给工业带来新的动力和发展模式。已有企业能根据各自的发展需求和加工设备的规模,来自主选择工业机器人柔性制造智能产线系统,这不仅满足了企业的基本生产需求,也保证了企业的经济效益。建立完整的工业机器人自动上下料的智能制造生产线,可以很好地解决许多生产线上因工件装载劳动强度大、生产效率低、风险高而带来的生产停滞不前的问题。同时提高了生产效率,降低了人工成本,从而降低整个生产成本。加快智能制造技术的应用和智能工厂的推广,是落实工业化和信息化深度融合、打造制造强国的重要措施,也是实现制造业转型升级的关键所在[1]。对于学校来说,创建完全的柔性制造智能工厂从经济性、实用性、可行性等各方面来说,都是不可能的。如何能让学生身临其境地感受柔性制造智能工厂?本破研究应用VisualOne 软件以企业全真实体生产车间为背景,以学校现有各种设备为组成,以生产多品种、中小批量、多工序的各种箱体类零件为主线,营造“源于现场、高于现场”的智能化生产情境,为智能工厂的真正落地实施提前预演,仿真其合理性和可实施性,既能让学生体验柔性制造智能工厂精益化、数字化、智能化,又能满足学生创建智能工厂、体验智能工厂所带来成就感,学生又能进入工作岗位的综合素质和职业能力增强。
1 设计任务
某公司智能工厂建设任务,具体要求:(1)主要进行多品种、多工序箱体类零件的混流加工;(2)加工后的零件需进行打磨;(3)打磨后的零件需装配;(4)装配的零件需与其他零件焊接;(5)该智能生产线重在多品种零件的加工,加工零件的品种可延伸性强;(6)加工后零件需进行较高尺度精度检测;(7)该智能生产线现场工人数不能超过4 人;(8)所有毛坯、成品件智能出库、智能入库,不需要人员参与;(9)流程节拍的零件自动输送;(10)生产节拍设计合理,生产效率高。
2 自制托盘和自制手爪
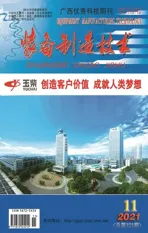
根据上述设计任务,为了满足生产多品种、中小批量、多工序的各种箱体类零件的加工,需合理规划工作流程以提高生产和加工效率。设计并自制的托盘和自制手爪如图1 和图2 所示。用于装夹各种箱体类零件的夹具是装夹到自制托盘上的,所以在该智能制造系统中工业机器人给机床上下料不是工业机器人手爪抓取和放下工件,而是人工在上料区先将待加工工件用夹具装夹到自制托盘上,上料时机器人将自制托盘连同工件和夹具一起从装夹工作台上搬运到数控机床上并固定,下料时机器人将自制托盘连同加工完的工件搬运到下一道工序或下一个流程的设备上,因此,数控机床的工作台是采用自制托盘,不加工工件时所有托盘放在托盘库里,上面装置有各种夹具。机器人搬运时手爪抓取托盘的状态如图3 所示。
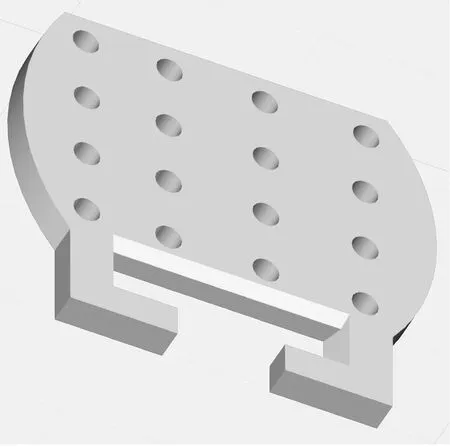
图1 自制托盘
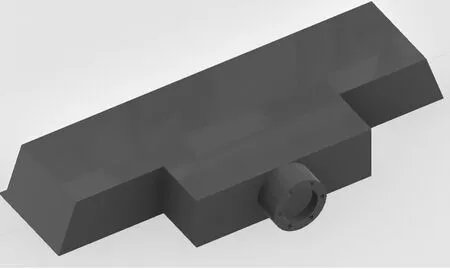
图2 机器人搬运自制托盘的手爪
图3 机器人搬运时手爪抓取托盘的状态
自制托盘在机床上的固定方式如图4 和图5 所示,图4 是自制托盘的下面,图5 是机床夹具上面,自制托盘夹在机床上。机器人上下料时用自制手爪抓取自制托盘,工件已由夹具安装和固定在自制托盘上。当一台数控机床完成加工零件时,工业机器人按照生产线的工艺流程将自制托盘运送到下一台机床的机床夹具上并进行固定夹紧。自制托盘与机床夹具的定位是由机床夹具上的两个短圆柱型定位销实现粗定位,再由四个圆锥面实现精确定位,机床夹具圆锥形底座内有气爪,可以抓住自制托盘上的拉钉,从而实现夹紧。
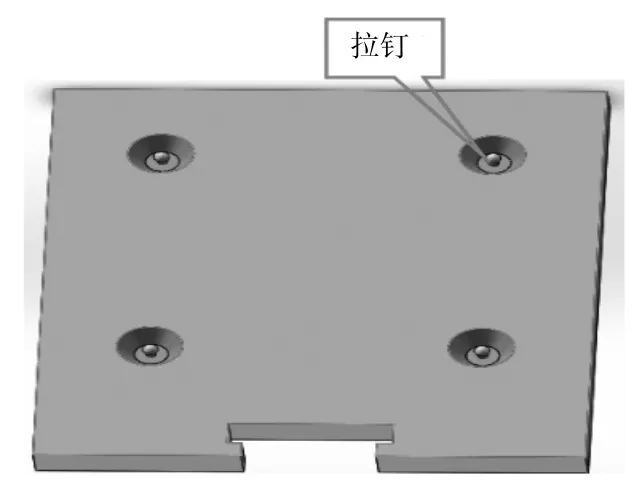
图4 自制托盘的下面

图5 机床夹具上面
3 智能工厂设计思路
智能工厂的设计应包括智能管理、智能设计、智能生产、智能物流、智能产品与服务。智能生产需要有智能装备。智能装备包括智能加工装备(数控设备、工业机器人、自动化生产线、3D 打印机等)、智能物流装备(立体仓库、输送设备、堆垛机、AGV 等)、智能检测装备(视觉检测、光电检测、计量检测、三坐标测量机等)、智能识别装置(智能采集、智能仪表、智能工具等)。
根据任务要求,规划2 台TH6535X63A 卧式铣镗加工中心、2 台VMC650E 经济型立式加工中心实现各个工序的混流加工。需要4 台机器人,其中1 台机器人安装自制手爪搬运自制托盘给4 台机床上下料,1 台机器人将加工完的工件搬运到输送带上,1 台机器人在打磨区进行打磨,1 台机器人将已加工工件与其它零件焊接。需要4 辆AGV 小车,分别实现托盘、毛坯的出库及托盘、成品件的入库。利用三坐标测量机进行工件的测量。需要1 台变位机、1 条自动物料传输线、2 个快换装置,6 个自动化立体仓库(包括托盘库、毛坯库和成品库)。需要1 个装夹区、1 个卸料区、1 个检测区、一间总控室及其他辅助设施,完成所要求工件的加工、打磨、装配、焊接。整套智能生产线系统的设计满足柔性化生产加工需求及自动化流水线的设计需求。柔性化操作加工工作范围内,作业人数为4 人/班。装夹区里1 人将毛坯装配到托盘上,检测区1 人将打磨后的工件从托盘上拆卸、搬运到检测区备料台上及将检测后的工件与其他已加工完的工件装配并搬运到输送带上,检测区1 人负责在三坐标测量机上检测工件,总控室1 人负责系统工作状态的监控。该智能工厂智能装备清单见表1。
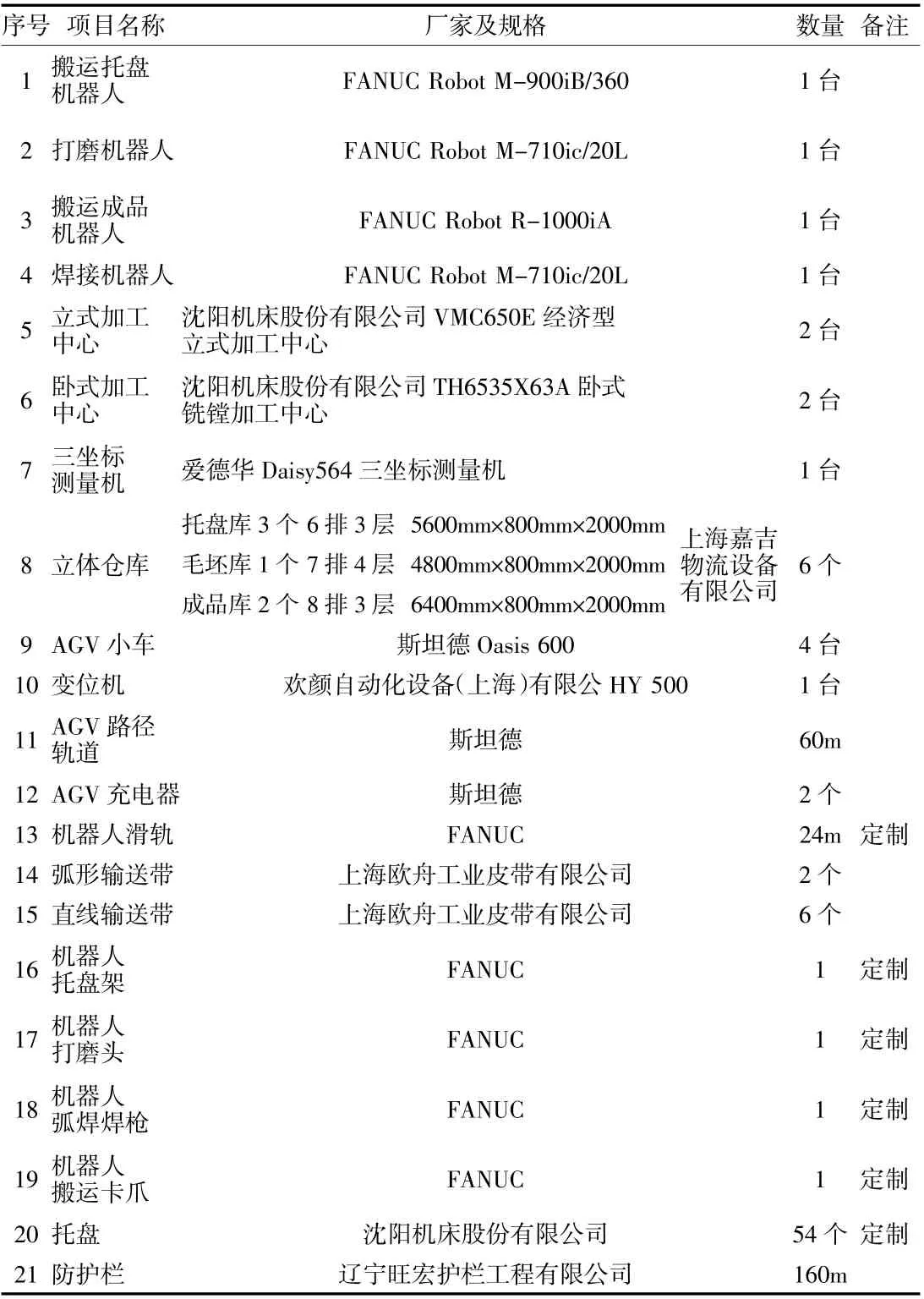
表1 智能工厂智能装备清单
4 智能工厂场景搭建
根据项目设计的要求,应用虚拟仿真软件进行场景搭建,本项目选用VisualOne 软件。VisualOne 软件是国际领先的全方位智能工厂虚拟仿真系统,可对智能制造过程进行仿真、数据收集和分析,可用于智能制造生产线规划和数字化车间布局设计,还可根据工业机器人的仿真轨迹生成离线程序,经过后置处理即可应用到实际的工业机器人中[2],是一款容易掌握、易于实现智能工厂的软件,可以运用其创建虚拟智能工厂,并进行流程的模拟仿真。场景搭建布局如图6 所示。
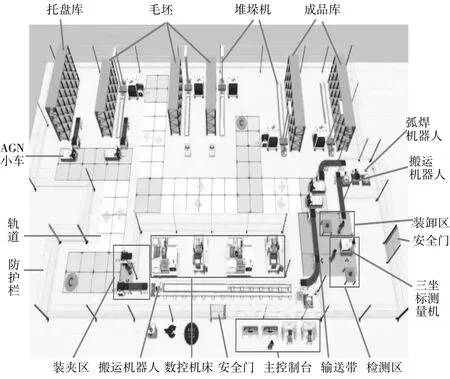
图6 场景搭建布局图
5 智能工厂工作流程仿真模拟
场景搭建后,可以对进行实际工件出库、装夹、搬运、加工、打磨、检测、装配、焊接、入库等流程进行模拟仿真,整个仿真运行工作流程如图7 所示。仿真过程重点是对其编程、信号传输、接口连接等,生产流程达到最优化,提高生产效率。
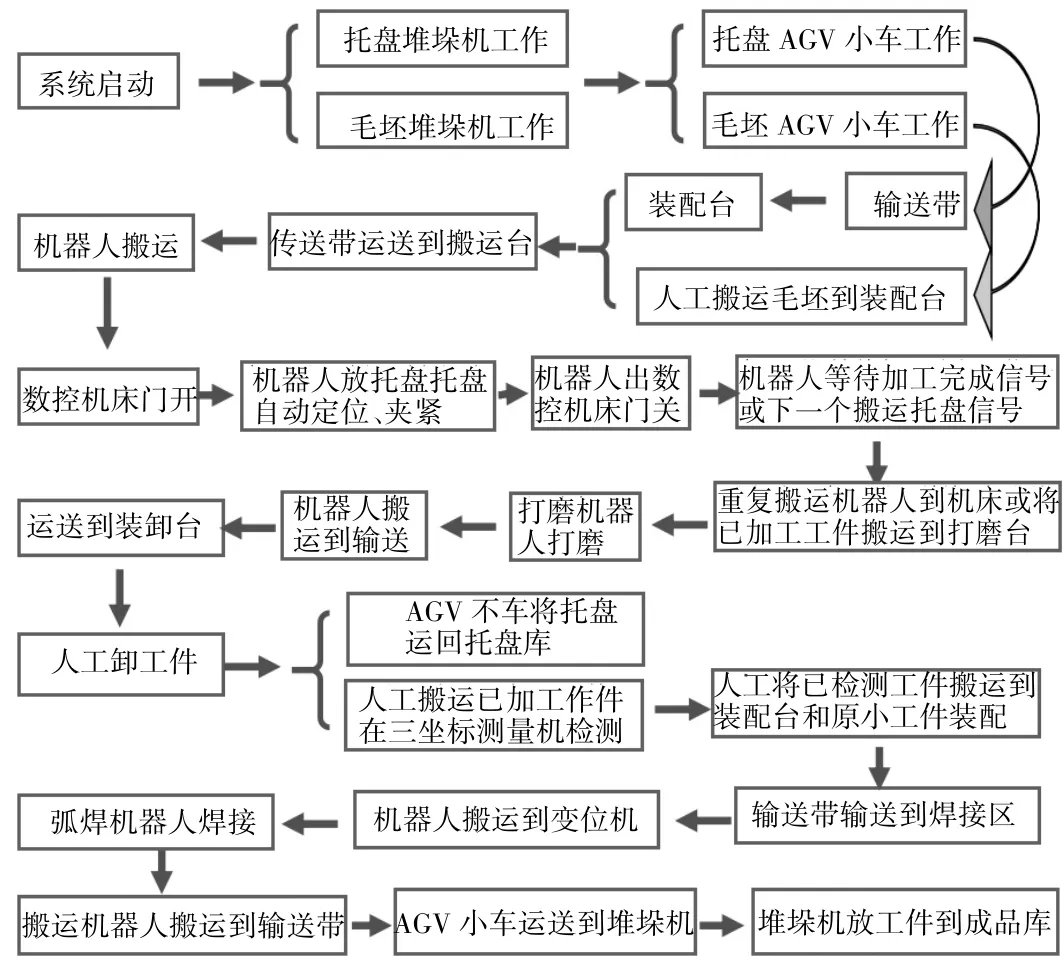
图7 柔性制造智能工厂的工作流程图
两台堆垛机分别将托盘和毛坯件放到两台AGV 小车上,一台AGV 小车将托盘运送到输送带上,由输送带将其运送到装夹台上,另一台AGV 小车将毛坯件运送到工作台上,由人搬运到自制托盘上进行定位装夹。
由机器人将装夹台上的托盘连同工件一起搬运到相应工序加工的数控机床上,托盘在数控机床上实现自动定位、夹紧,数控机床开始加工工件,在这期间没接到已加工完工件信号,搬运机器人继续搬运其他已装夹好的托盘到其他数控机床上。当接到已加工完信号机器人将托盘搬运到打磨台上,由打磨机器人对已加工完工件进行打磨。接受到打磨完信号后,机器人再将托盘搬运到输送带上,将托盘运送到装卸区的工作台上,由另一人将打磨后的工件从托盘上卸下。AGV 小车将托盘运送到托盘库。
每台数控机床上配有刀具测头系统,进行刀具断刀检测,将其存放到刀具寿命管理系统中。另外,数控机床上还配有刀具库管理系统,用于建立刀具损耗情况、刀具库存情况等信息。每台数控机床上还配有摄像机视觉系统,将其现场加工情况反馈到看板上,可通过看板监视每一台数控机床加工情况。
由人将打磨后工件搬运到三坐标测量机上进行尺寸精度检测。若三坐标测量机正在检测工件,则将工件搬运到待检台上。检测完尺寸精度后,由人将工件搬运到和输送带相连接的装配台上,将已加工完的两个工件进行装配,装配好后由输送带将其运送到焊接区。由另一台机器人将其搬运到转位机上,由弧焊机器人进行焊接,焊接后由机器人将其搬运到输送带上,AGV 小车将成品件运送到堆垛机上,将其放到成品库中。变位机负责工件的定位、回转及翻转。
配备门机连锁,当AGV 小车区、加工区有人员操作或误开防护门时,AGV 小车、机器人停止工作,避免误触、误操作及其他不当操作对作业人员造成伤害。
主控制台负责4 台机器人、变位机及数控机床联机协同工作。它配备有软件系统、独立检测系统及人机交互界面。该系统还具有功能完善的数据处理功能,可与上位机的接口组成自诊断系统,满足客户未来的个性化需求及自动生产线的升级需求。
6 结束语
智能工厂是自动化制造业的未来,是将智能制造技术的创新及应用贯穿制造业全过程。智能工厂所追求的是制造过程管控可视化[3]。本研究的柔性制造智能工厂是将现有设备利用起来所构成的智能工厂的雏形。柔性制造智能工厂虚拟仿真虽非真正的实体工厂,但通过虚拟仿真软件的场景搭建、工作流程仿真,初步认识到“中国制造2025”所设计的中国制造业的升级转型的模式。智能制造是“中国制造2025”战略的主攻方向,而工业机器人作为智能制造的集大成者,是智能制造的核心,也是基础工程。推动机器人的发展,是“中国制造”强国战略的十大重点发展之一,也是促进中国向制造强国发展的标志性工程。