基于自抗扰模糊参数优化的纵列式植保无人机姿态控制仿真
2021-03-16何志辉高万林何雄奎王敏娟
何志辉, 高万林,2, 何雄奎, 王敏娟,2, 宋 越
(1. 中国农业大学 信息与电气工程学院, 北京 100083; 2. 农业部 农业信息化标准化重点实验室, 北京 100083; 3. 中国农业大学 理学院, 北京 100193)
随着航空技术及数字信息技术的发展,现代农业航空技术已成为农业现代化的显著特征和标志之一[1].植保无人机是现代农业航空技术应用的一个重要领域,其在作业过程中会对非靶标生物产生影响,对环境也有污染[2-3],怎么避免或减轻农业对非靶标生物的影响和对环境的污染,这对植保无人机快速、精准的姿态控制提出了更高的要求.传统PID控制方法设计简单、方法成熟,目前植保无人机的姿态控制基本都采用该方法.但由于其控制参数固定,不具备理想的抗干扰能力,使植保无人机很难实现高性能的飞行控制.
为提高植保无人机的姿态控制性能,针对当前植保四轴飞行器在作业过程中自身载荷发生改变后的飞行控制性能下降、抵抗环境扰动能力差的问题,刘浩蓬等[4]提出了一种模糊 PID 控制算法,提高了植保无人机姿态控制的稳定性和快速响应等方面性能.李汉博[5]、李永伟等[6]、荆学东等[7]学者也对植保无人机的姿态控制加入模糊控制做了类似研究.廖懿华等[8]运用专家控制策略改进PID控制方法,使控制参数适应无人机姿态变化,提高农田信息采集用多旋翼无人机的姿态控制性能.上述研究在经典PID控制的基础上引入了模糊控制或专家控制,这只能在一定程度上改善农用及植保无人机的姿态控制性能.
提高植保无人机姿态控制性能需要解决好两个问题:一是如何解决快速性和超调之间的矛盾;二是如何补偿外部干扰和参数不确定性.针对这些问题,自抗扰控制[9-10](ADRC)不需要任何先验信息,并且擅长抑制干扰和参数不确定性,为植保无人机姿态控制性能的提升提供了一种可能的有效的控制方法.自抗扰控制技术已经在许多领域得到了应用,取得了显著效果[11-12].在航天领域,吴忠等[13]为抑制航天器自身结构参数变化和内外扰动对姿态控制精度和姿态稳定度的影响, 设计了航天器姿态自抗扰控制器,其研究表明自抗扰控制器是可行的.康莹等[14]针对一般航天器动力学姿态控制问题, 提出了一种二阶线性自抗扰控制方法,该控制方法对航天器系统中存在的不确定性及外界干扰具有很强的抑制能力,且具有比较简单的结构,解决了传统控制方法过多依赖航天器精确模型的问题.然而,在ADRC控制器中要设置适当的非线性反馈律参数以达到理想的系统动态控制性能并不是很容易.针对以上这些问题,文中引入具有自适应推理和非线性反馈律参数估计能力的模糊逻辑控制,对ADRC非线性反馈规律的参数进行调整,提出一种新的具有估计和补偿未知扰动和参数不确定性的植保无人机模糊自抗扰控制方法,以提高植保无人机的姿态控制性能.
1 纵列式无人直升机
无人直升机按照布局可以分为单旋翼带尾桨、共轴双旋翼、纵列式双旋翼、横列式双旋翼等多种形式.与单旋翼带尾桨无人直升机相比,纵列式双旋翼无人直升机具有以下优点[15-16]:相同升力时旋翼尺寸小,质量效率较高;折叠后飞机尺寸小,更适合转场运输;桨盘载荷较小;悬停需用功率较低;抗侧风能力较强;重心变化范围较大.从纵列式无人直升机的这些优点来看,该机型在植保无人机领域有较好的应用前景,因此文中将采用模糊自抗扰控制技术对其姿态控制加以研究.
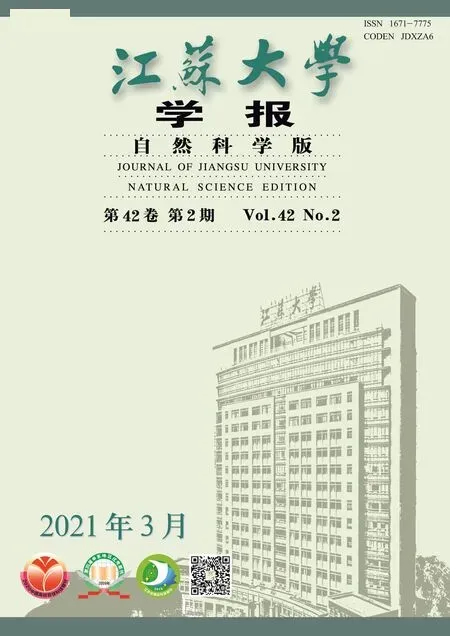
首先对纵列式无人直升机的飞行控制原理进行简要分析.纵列式无人直升机具有前后纵向排列,旋转方向相反,扭矩相互抵消的两个旋翼,如图1所示.通常,两个旋翼桨盘会有20%至50%的重叠,因此轴间距约为1.8r~1.5r(r为旋翼半径).为了尽量减少前旋翼尾迹对后旋翼产生气动干扰,后旋翼一般会高于前旋翼0.3r~0.5r[17-18].

图1 纵列式无人直升机的结构布局
2 动力学建模
纵列式无人直升机有多种飞行模式,其中悬停是最基本的一种.由于其建模相对简单,文中主要讨论在近似悬停模式下纵列式无人直升机的建模与控制问题.为了方便建立其动力学模型,需要做出以下假设: ① 从上往下看,前旋翼叶片顺时针旋转,后旋翼叶片逆时针旋转,见图2; ② 假设前后旋翼叶片直接从旋转轴处铰链,即挥舞铰偏置量为0,桨毂力矩为0; ③ 忽略前后旋翼间的气动干扰; ④ 假设周期变距是可测量和控制的,纵向周期变距角和横向周期变距角可以直接用作控制输入,和前、后旋翼的总距产生的推力一起构成直升机的控制输入; ⑤ 为控制方便在假设④的基础上进一步假设前、后旋翼的总距和转速相等,即前、后旋翼的拉力相同,同时也假设前、后旋翼的纵向周期变距也相同; ⑥ 假设纵列式无人直升机机体相对于机体坐标系中的xbozb和ybozb是对称的(如图2所示),因此可以得到Ixy=Iyz=Izx=0.
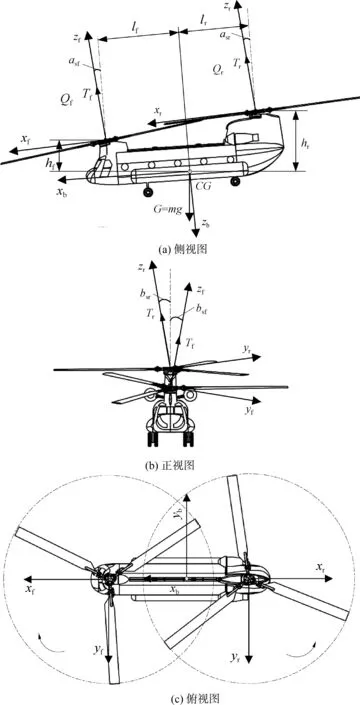
图2 纵列式无人直升机的力和力矩
为了更方便地得到纵列式无人直升机的数学模型,可以将其动力学分为两部分:第一部分和合力产生平移运动有关;第二部分和产生转动效果的合力矩有关.建模过程中用到的一些符号如下:Tf、Tr、Tm表示前、后旋翼产生拉力及其平均值;ais、bis表示桨尖轨平面相对旋翼轴的纵向和横向倾角,i=f,r,代表前、后旋;δic、δie、δia表示总距、纵向周期变距、横向周期变距;Xim、Yim、Zim表示前、后旋翼产生的力在机体轴系上的分量,Xm=Xfm+Xrm;F、Fx、Fy、Fz表示合力及合力在惯性轴系中的分量;R表示机体轴系相对于惯性轴系的旋转矩阵;m,g表示直升机总质量和重力加速度;hf、hr、lf、lr表示前、后旋翼中心到重心的垂直和水平距离;M、Mx、My、Mz表示合力矩及合力矩在体轴系中的3个分量;Θ=[φ,θ,ψ]T表示欧拉角;P=[Px,Py,Pz]T表示直升机在惯性系中的位置矢量;vp=[up,vp,wp]T表示惯性坐标系中的速度矢量;vb=[ub,vb,wb]T表示机体坐标系中的速度矢量;ωb=[pb,qb,rb]T表示直升机在体轴系中的角速度矢量;ψ(Θ)表示欧拉角相对体轴系中的角速度的转换矩阵;Ix、Iy、Iz表示机体转动惯量.
2.1 平移力
在上述假设下,可以得到
Tm=Tf=Tr,afs=ars,
(1)
前、后旋翼的拉力与总距、纵向周期变距及横向周期变距有关[19-21].
(2)
式中:c1,c2为常数,c1=5.35,c2=74.28.
前、后旋翼产生的力可表示为
(3)
在悬停和近似悬停条件下,飞行速度很低,可以忽略机身阻力.同时忽略旋翼下洗对机身增重的影响,因此合力可以表示为
(4)
惯性参考系和固连在纵列式无人直升机上的机体坐标系之间的关系由旋转矩阵[20]表示:

(5)
式中:s和c分别表示正弦和余弦函数.
2.2 力 矩
由前、后推力Tf和Tr产生的扭矩是由于重心和旋翼线不重合造成的.无人直升机可以绕着重心自由旋转,因此重力不会产生扭矩.如前文所述,文中主要研究悬停或近似悬停模式下的姿态控制,飞行速度很低,可以忽略机身力矩.此外,根据前文的假设,前、后旋翼旋转产生的反转力矩Qf和Qr相互抵消.因此,总扭矩可以表示为
(6)
2.3 动力学模型
纵列式无人直升机的刚体动力学方程在机体坐标系下用牛顿-欧拉方程表示如下:
(7)
(8)
结合方程组(6)和(8),可以得到
(9)
在惯性系下平移运动的运动学方程可以表示为
(10)
(11)
式中:Rij为旋转矩阵R中的第i行,第列j的元素.
姿态角与角速度的关系如下:
(12)
由于在悬停或近似悬停模式下,姿态角和姿态角速度都不大,因此方程式(12)可简化为

(13)
最终由微分方程组(9)、(10)、(11)和(13)组成了纵列式无人直升机在悬停或近似悬停模式下的动力学模型.相关的控制输入包括前、后旋翼的两个总距、两个纵向周期变距和两个横向周期变距,以产生控制力和力矩控制所需的运动,这些控制输入都包含在方程组(14)中.
(14)
为了简化纵列式无人直升机的控制复杂性,其姿态制系统可以分为4个子系统,可以定义4个独立的虚拟控制输入,分别为U1、U2、U3和U4.垂向力输入U1控制沿Z轴的运动;滚动力矩输入U2控制沿X轴(滚动角度)的旋转;俯仰力矩输入U3控制沿Y轴(俯仰角)的旋转;偏航力矩输入U4控制沿Z轴(航向角)的旋转.
(15)
因此,将方程(14)和(15)结合起来,可以得到纵列式无人直升机的动力学模型,即高度/姿态模型:
(16)
3 模糊ADRC控制器设计
纵列式植保无人直升机存在外部干扰和参数不确定性,为了获得高性能的姿态控制和增强系统的鲁棒性,通过安排过渡过程(TD)、设计扩展状态观测器(ESO)和非线性状态误差反馈控制律(NLSEF),并加入模糊控制调整非线性状态误差反馈控制律的2个参数,提出了一种模糊ADRC控制器,所提出的姿态控制方案如图3所示.
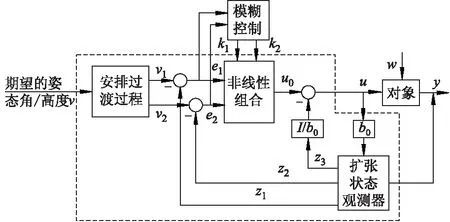
图3 纵列式无人直升机姿态/高度控制方案
3.1 ADRC控制器设计
具有扰动估计补偿功能的ADRC控制器由如下几个部分所组成[10]: ① 安排过渡过程.根据设定值v安排过渡过程v1,并提取其微分信号v2; ② 根据对象的输入信号u和输出信号y,估计出对象的状态x1、x2和作用于对象的总和扰动x3; ③ 状态误差的非线性反馈律.系统的状态误差是指e1=v1-z1,e2=v2-z2,误差反馈律是根据误差e1,e2来决定的控制纯积分器串联型对象的控制规律u0; ④ 对误差反馈控制量u0用扰动估计值z3的补偿来决定最终控制量.
式中:参数b0是决定补偿强弱的“补偿因子”.
3.1.1 安排过渡过程
事先安排过渡过程不仅能有效解决超调与快速性矛盾,而且能提高控制器的鲁棒性[22].安排过渡过程可由跟踪微分器来实现,其离散形式如下:
(17)
式中:h为积分步长;r为速度因子;h0为滤波因子;v为输入信号;x1为输入信号的跟踪信号;x2为输入信号的近似微分信号;fhan(x1,x2,r,h0)为最速控制综合函数,其具体算法为
(18)
3.1.2 扩张状态观测器
作用在系统动力学模型上的系统内部不确定性和外部扰动会影响系统的控制性能,甚至导致系统不稳定,而ESO能够将这些不确定性作为一个扩张状态进行估计,并在控制器中补偿[23].实现ESO的具体算法为
(19)
式中:参数β01、β02、β03、α1、α2、δ按文献[10]推荐方法取值;b0在大范围内取值都能使得扩张状态观测器取得良好的控制效果,一般取b0=1.函数fal(e,αi,δ)的实现形式为
(20)
3.1.3 非线性状态误差反馈控制律
非线性状态误差反馈控制律(NLSEF)是针对PID将被控对象输出值偏离其期望值的差的各个环节以线性组合的形式来产生控制器的最终控制量的局限性而改进后的一种控制规律的设计[24].状态误差是指跟踪微分器中的跟踪信号与扩张状态观测器中的系统状态之差以及跟踪信号的微分与扩张状态观测器中的系统状态之差.这两个状态误差,经过构造的非线性函数fal的组合下反馈到控制系统被控对象的输入端,从而构成非线性状态误差反馈来对控制对象加以控制.离散化的非线性状态误差反馈控制律的具体形式为
(21)
式中:参数α01、α02按文献[24]方法取值;参数k1、k2用模糊逻辑控制方法进行在线调整,其初值按文献[25]方法取值.
3.2 模糊ADRC控制器设计
在常规的ADRC中,非线性状态反馈控制律的参数k1、k2通常被设置为常数.然而,在纵列式植保无人机的姿态控制中,将参数k1、k2设置为常数,可能不能适应姿态机动过程中状态误差的变化而影响系统的动态性能.为了提高系统的自适应能力,提高系统的动态性能,因此引入了具有推理能力的模糊逻辑控制,在线调整非线性状态反馈控制律中的参数k1、k2.模糊ADRC控制器由常规ADRC控制器和模糊控制器组成,其结构如图4所示.
模糊ADRC以状态误差e1和e2为输入值,以非线性状态反馈控制律的参数k1、k2为输出,利用模糊控制规则在线修改ADRC参数,满足e1和e2在不同时间变化时,调整ADRC参数的要求.
文中选取的输入语言变量为状态误差e1和其变化率e2,e1的范围为[-2,2],e2的范围为[-10,10].选取的输出语言变量为Δk1、Δk2,Δk1的范围为[-30,30],Δk2的范围为[-5,5].上述语言变量均被分为7个语言值:NB(负大)、NM(负中)、NS(负小)、ZE(零)、PS(正小)、PM(正中)、PB(正大).输入、输出的隶属度函数均采用高灵敏度的三角函数.模糊控制器采用Mamdani型,并采用重心法解模糊.
通过总结工程实践经验和专家知识[26-31],建立模糊控制规则,如表1所示.

表1 Δk1、Δk2模糊控制规则表
将经过在线调整后的模糊自适应参数k1、k2代入到非线性状态误差反馈控制律公式(21)中完成参数的在线调整,参数k1、k2可以写成:
4 基于Simulink仿真及分析
为了验证所设计的模糊ADRC控制器对纵列式植保无人机姿态控制的有效性,使用Matlab中的Simulink工具箱为仿真试验平台,进行仿真.仿真中用到的模型参数如下:m为46 kg;hf为0.3 m;hr为0.45 m;lf为0.9 m;lr为0.98 m;Ix为1.5 kg·m2;Iy为2.9 kg·m2;Iz为3.0 kg·m2.
横滚、俯仰、偏航3个姿态角的初始角度设置为(0°,0°,0°),期望姿态角为(10°,10°,10°),初始高度为0 ,期望高度为10 m.为显示出模糊ADRC控制器的优越性,将Fuzzy ADRC和FuzzyPID及PID控制器的仿真结果进行了比较.同时为了验证FADRC的具有优良的抗干扰能力,在4个通道,仿真时间为5 s时,增加了脉宽为5%、周期为5 s、幅度为15的脉冲干扰信号.另外以横滚通道为例,对经典Fuzzy ADRC和FuzzyPID及PID控制器的鲁棒性能进行了试验.
4个通道的模糊ADRC控制器参数和Fuzzy PID及经典PID参数整定后列于表2中(其中Fuzzy PID的初始控制参数同经典PID相同).
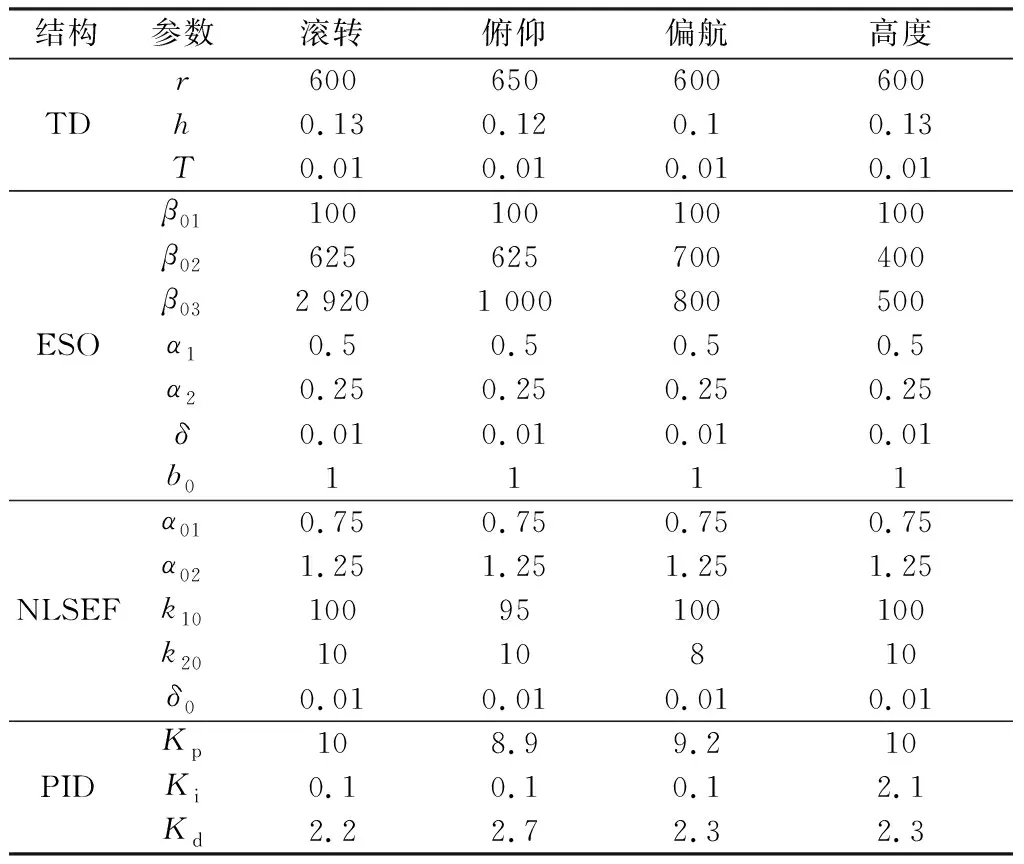
表2 自抗扰模糊参数优化控制器及PID参数表
各试验的仿真结果如图4-8所示.从图可以看出,在纵列式植保无人机的姿态控制的比较中,在上升时间方面,Fuzzy ADRC、Fuzzy PID和经典PID基本相同.在超调量方面,在4个通道上,Fuzzy ADRC和Fuzzy PID控制都基本没有超调,在横滚通道中,Fuzzy ADRC和Fuzzy PID控制都比经典PID控制要小25%左右.在调整时间方面,4个通道上,Fuzzy ADRC控制比Fuzzy PID及经典PID控制调整时间短,在横滚通道中,Fuzzy ADRC控制的调整时间基本只有经典PID控制调整时间的25%左右,也只有Fuzzy PID控制调整时间的50%左右.在稳态精度方面,Fuzzy ADRC和Fuzzy PID及经典PID控制都基本为0.在抗外界干扰方面,Fuzzy ADRC控制在4个通道都展示出了非常优秀的抗干扰能力,3种控制方法的抗干扰能力的强弱依次为Fuzzy ADRC、Fuzzy PID 、PID.在鲁棒性方面,从图8可以看出,当转动惯量Ix减小33%时,Fuzzy ADRC控制和Fuzzy PID控制展示了非常优越的鲁棒性,Fuzzy ADRC的控制品质对对象参数的摄动并不敏感,而经典PID控制的仿真曲线则在Ix变化前后有较大的变化,其鲁棒性较Fuzzy ADRC控制弱.

图8 3种控制方法控制鲁棒性试验

图4 3种控制方法在横滚回路的仿真结果
图9展示了安排过渡过程后,跟踪参考输入信号v1及其微分信号v2的曲线,从前面的仿真结果也说明了,安排过渡过程是解决快速性和超调矛盾的有效办法.图10展示了扩张状态观测器能有效地估计状态变量x1、x2及作用于对象的总和扰动x3,有了实时跟踪估计的结果才能进行有效补偿,这是自抗扰控制具有优秀的抗干扰能力的本质.

图5 3种控制方法在俯仰回路的仿真结果

图6 3种控制方法在偏航回路的仿真结果
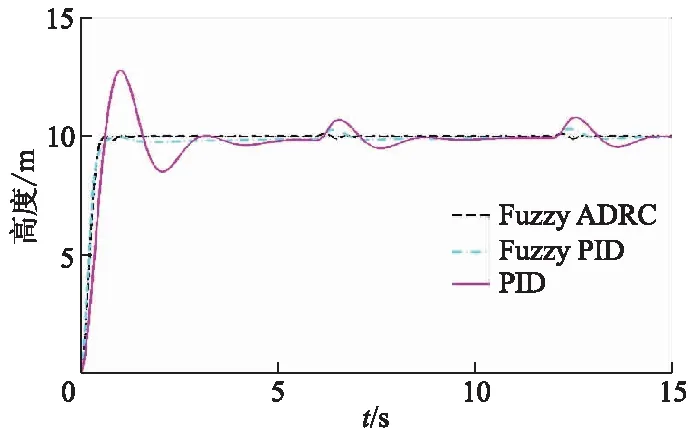
图7 3种控制方法在高度回路的仿真结果
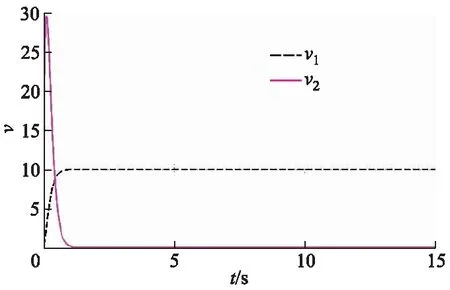
图9 跟踪参考输入信号及其微分信号

图10 x1、x2及x3的估计值
5 结 论
为抑制纵列式植保无人机自身结构参数变化和内外扰动对姿态控制性能的影响,设计了纵列式植保无人机姿态自抗扰控制器.与已有的经典PID及Fuzzy PID植保无人机姿态控制方法研究相比,文中方法采用了适应性很强的Fuzzy ADRC控制技术,设计了过渡过程TD,解决了快速性和超调之间的矛盾;设计了扩张状态观测器,实现了对对象总扰动的有效跟踪估计;设计了非线性状态误差控制律,对实时估计的总扰动进行了有效补偿;最后对非线性状态误差控制律的参数加入了模糊控制进行优化.试验结果表明文中提出的方法能够有效实现纵列式植保无人机姿态控制,且具有很好适应性.