直线开关磁阻电机单神经元智能位置控制*
2021-03-16唐传胜
王 娜 唐传胜 徐 珂
(1.河南工业职业技术学院 南阳 473000)(2.南阳理工学院 南阳 473000)(3.河南工学院 新乡 453000)
1 引言
直线开关磁阻电机由于其结构简单、可靠性高、启动电流小、启动推力大、具有大的加速度等特点,满足了现代工业高速度、高精度性能的要求,尤其适用于需要直线进给运动的场合(无需蜗轮蜗杆、滚动丝杠、齿轮齿条等中间传动环节),得到国内外学者的广泛关注[1~2]。直线开关磁阻电机模型中不仅存在电流、磁链、转速的耦合,而且磁链、电感、转矩都是随着动子位置而变化的非线性函数,使其具有高度非线性[3~4]。同时,直线开关磁阻电机系统中存在参数不确定性、负载扰动、推力波动及摩擦等因素,增加了控制系统设计难度。
针对强耦合、非线性、多时变等复杂因素的电机高性能动态控制,成为研究的热点之一[5~16]。由于PID控制结构简单,容易实现,在现有工业控制领域中占据着绝对统治地位。文献[5]将PID控制应用于直线开关磁阻电机中,在精度和动态性能要求不高的场合,能满足要求。由于PID控制对系统模型具有较强的依赖性,无法实现高性能的控制。文献[6]和文献[7]将模糊控制理论应用于PID控制器设计,分别提出了模糊PID和变论域模糊PID控制,提高了对系统参数和外部扰动的抑制能力。文献[8~12]分别将自适应控制、滑模控制、反步控制、无源控制等现代控制方法应用于电机的位置跟踪控制。文献[13]将模糊控制与滑模控制相结合,利用模糊估计实现控制增益自动调整,并通过与PID控制、模糊控制进行对比,验证了所提方法的优越性。文献[14]考虑到网络延时存在时的直线开关磁阻电机控制问题,将其转换成先行矩阵不等式进行控制器设计。文献[15]将前馈控制和线性反馈控制相结合,提出了二阶轨迹平滑滤波跟踪控制策略。
近年来,变结构控制越来越受到人们的关注,这是由于其不仅结构简单,易于实现,而且对系统参数变化和外部扰动不敏感,而且单神经元控制是一种简单的智能控制策略,可以有效解决复杂神经网络在控制系统设计中结构难于确定的问题,成为学者们热衷的一种方法[16~17]。文献[16]将单神经元分别用于永磁同步电机d轴和q轴的电流控制,实现电流的动态跟踪。文献[17]将单神经元用于IPMSM的速度跟踪控制,并通过仿真验证了在参数变化和外部扰动时仍具有较好的动态性能。
本文提出一种基于果蝇优化算法的单神经元自适应控制方法,将单神经元自适应控制用于直线开关磁阻电机的位置跟踪控制。同时,针对传统单神经元控制存在的权值调整规则易陷入局部最优等缺点,利用果蝇优化算法对神经元权值在线调整,提高神经元的自学习和自适应能力,实现直线开关磁阻电机的高性能位置跟踪控制。
2 直线开关磁阻电机的结构及数学模型
本文所研究的直线开关磁阻电机结构如图1所示。该电机是一种3相单边开关磁阻电机,类似于将旋转直线电机沿着径向展开,旋转电机的转子、定子分别对应于直线开关磁阻电机的动子和定子。结构模型中各参数的含义如表1所示。
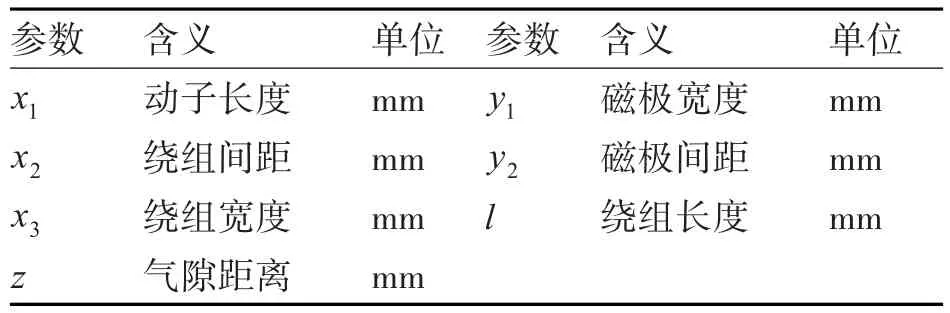
表1 直线开关磁阻电机模型参数
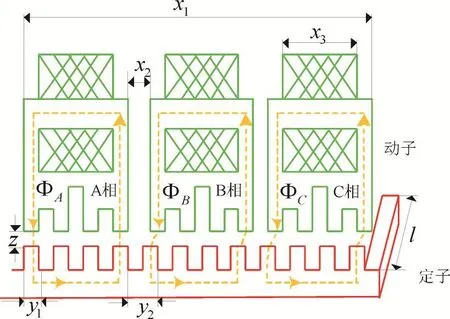
图1 直线开关磁阻电机结构模型
忽略绕组间互感的影响,直线开关磁阻电机控制的模型可表示为
电压方程:

推力表达式:

运动方程:

其中,Uk、ik、λk和Rk分别为相电压、相电流、相磁链和相电阻,Mn表示动子质量,x为动子的位移,x˙=v为动子移动的速度,F为电磁推力,Bn为线性摩擦系数,Fr、FL和Ff分别为系统的推力波动、负载扰动和非线性摩擦力。
3 单神经元自适应控制器设计
3.1 直线开关磁阻电机运动模型的离散化
由于本论文设计的是位置和速度外环控制器,需要对直线开关磁阻电机运动方程进行离散化。
由式(3)可得,系统的传递函数为

由式(4)知该系统为二阶系统,采样时间取Ts=1ms,采用z变换进行离散化,经过z变换后的离散对象为

其中,a1、a2、b1和b2分别为离散后的系数,d(k)为系统总扰动。
3.2 单神经元自适应控制器设计
本文设计的控制器结构如图2所示。单神经元自适应控制器有单神经元自适应控制和神经元权值在线优化两部分组成。通过对神经元权值系数的自动调整(果蝇在线优化)来实现自适应、自组织功能,其控制率为
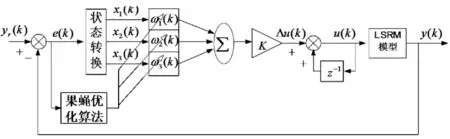
图2 直线开关磁阻电机单神经元自适应控制器

其中,u(k)和u(k-1)分别为第k和k-1时刻控制器的输出(即期望电磁推力);ωi(i,2,3)对应xi(i,2,3)的权值系数,其中xi(i,2,3)的表达式为
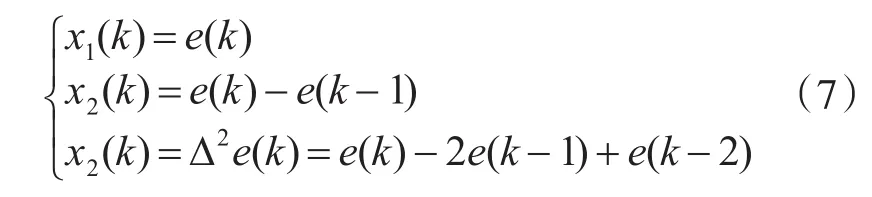
其中,e(k)、e(k-1)和e(k-2)分别对应第k、k-1和k-2时刻的动子位置跟踪误差。

图3 果蝇算法单神经元自适应控制参数优化流程
该算法中,果蝇个体觅食的随机方向和距离计算如下:

与原点的距离Di和味道浓度函数Si的计算如下:
4 仿真实验与分析
为了验证本方法的有效行,下面与PID控制进行对比。
直线开关磁阻电机主要参数:动子质量Mn=4.6kg,摩擦系数Bn=0.01N·m/s,系统离散化的采样周期为Ts=1ms,总仿真时间为1s,指令信号是一个幅值为1的梯形波,在t=0.2s和t=0.7s时加入突变负载,控制器参数设置如下:神经元比例系数取K=0.1,神经元初始权值取W=[ω1(0)ω2(0)ω3(0)]=[0.1 0.1 0.1],果 蝇 优化算法迭代次数为100,种群规模为100,随机方向和距离区间为[-1,1],仿真结果如图4~图7所示,本方法与PID控制位置跟踪性能比较如图8所示。
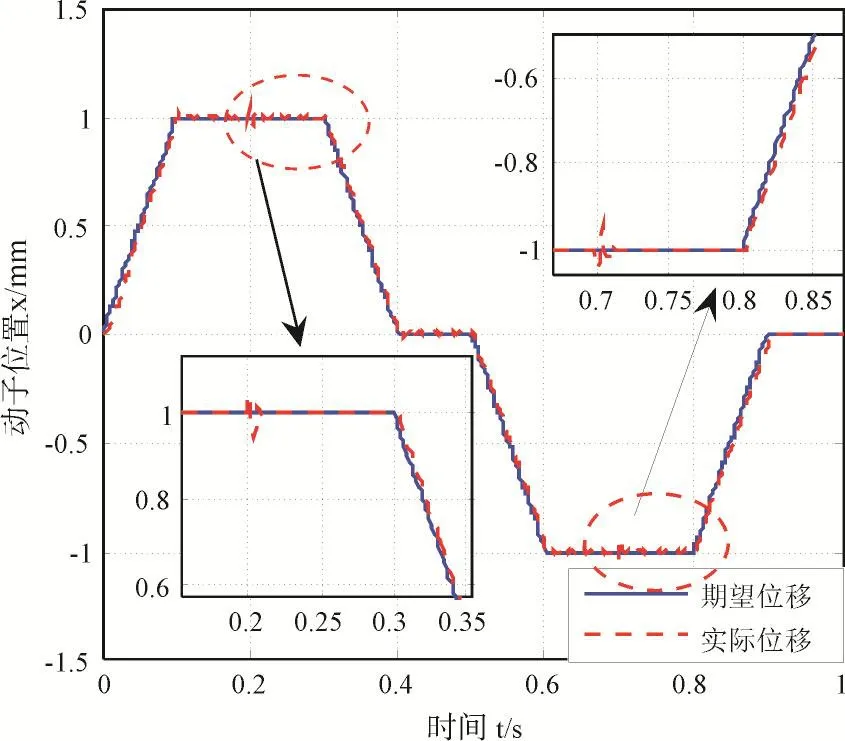
图4 直线开关磁阻电机转子位置响应曲线
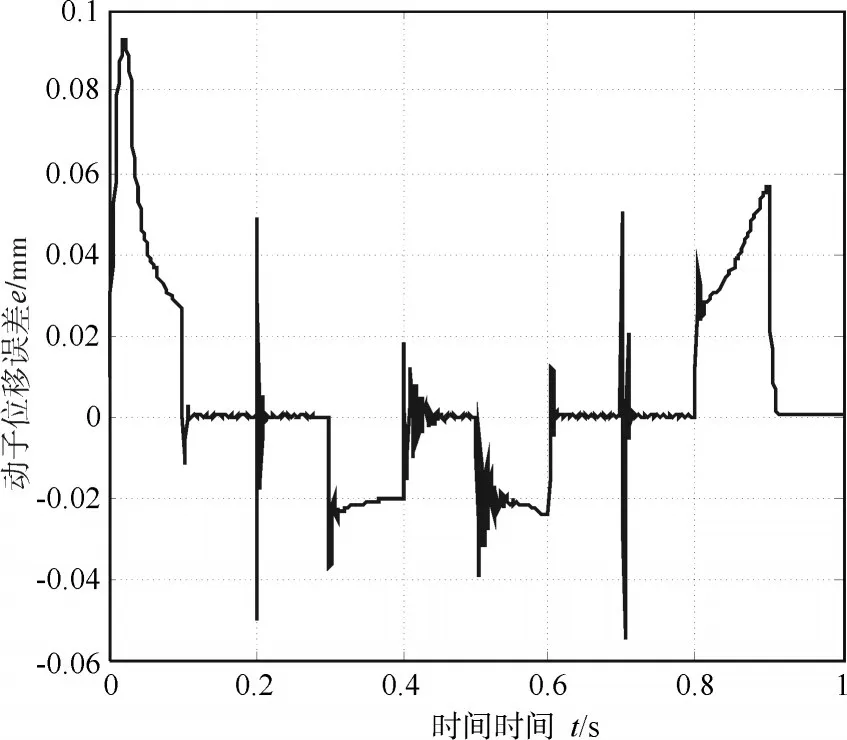
图5 直线开关磁阻电机转子位置误差曲线
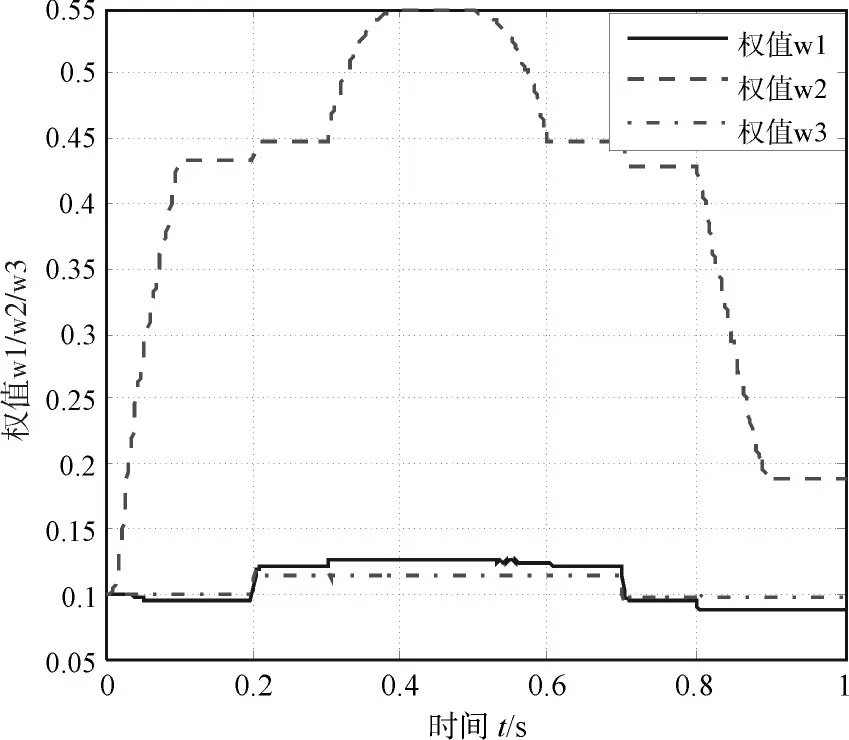
图6 单神经元权值果蝇优化曲线
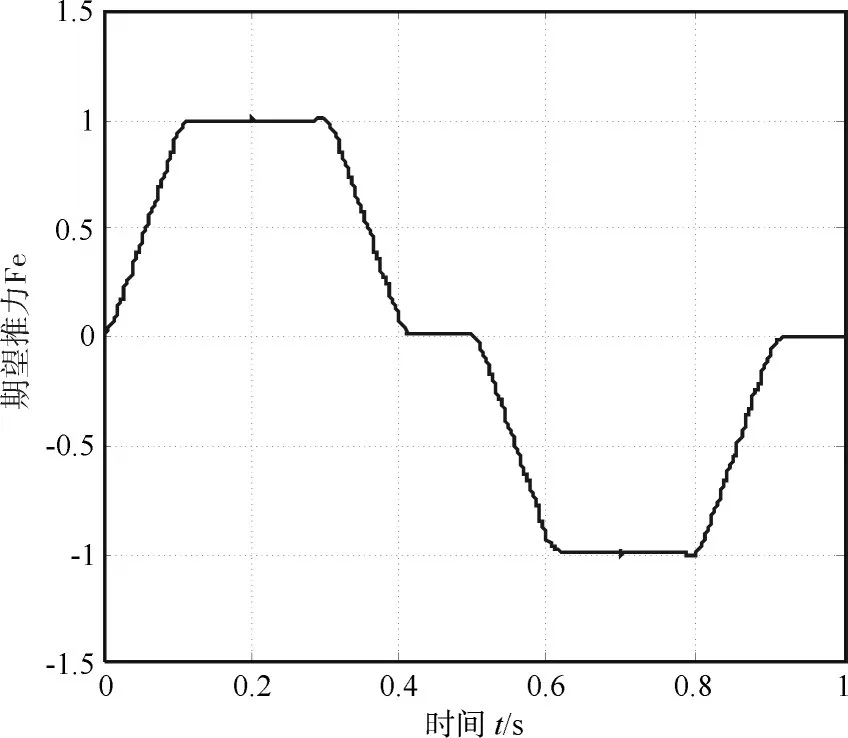
图7 期望推力控制输出曲线
由图1~图8可知:1)启动阶段,采用该方法具有良好的动态跟踪能力,动态跟踪误差控制在10%以内,稳态时具有很高的跟踪精度;2)在0.2s和0.7s时,添加外部扰动,转子位置误差增加至5%,又在0.01s内恢复到指定位置;3)由图6知神经元的权值根据转子位置的变化,利用果蝇优化能很好地实现神经元权值的自动调整,提高了系统的动态响应能力;4)控制器的输出(期望的推力)是一条平滑的曲线,有效地改善转矩性能。由图8对比常规PID控制和本文提出的单神经元自适应控制,本文具有更好的动态启动性能,在转子位置有较大变化时,PID控制存在超调严重。
综上所述,本文所提出的策略不仅能够使系统快速稳定地跟踪位置指令,而且对外部扰动具有较强的鲁棒性。
5 结语
直线开关磁阻电机是一个复杂的非线性系统,参数时变和外部扰动严重影响其定位精度。本文提出了一种基于果蝇优化算法的单神经元自适应位置跟踪控制方法,该方法能有效地克服外部扰动,而且具有很好的动静态跟踪性能。仿真结果验证了本文所提出方法的优越性。
