一种弹载雷达末段跟踪CFAR检测方法研究与实现*
2021-03-16
(中国西南电子技术研究所 成都 610036)
1 引言
随着雷达技术不断革新,弹载雷达提供高分辨距离-多普勒图像,更明显体现出目标特性,便于目标检测,同时高分辨图像也给数据处理带来挑战,更高的分辨率也意味着更大的数据量。由于弹载雷达高速运动,对数据更新率高要求,快速准确实现目标检测尤为关键。弹载雷达导引头在距离-多普勒图像中一般采用CFAR检测算法,CFAR检测技术能够在时变的背景杂波噪声环境下保持一定的虚警率[1~3]。传统CFAR检测方法针对高分辨一维距离像数据采用左右线性滑窗检测,针对距离-多普勒二维图像数据采用矩形滑窗检测[4]。
目标检测是雷达技术的重点,一直以来都被广泛研究。张倩[5]等研究了对SAR图像的自适应窗口快速CFAR检测器。艾加秋[6]等研究了对SAR图像的双参数CFAR舰船检测算法。Smith M E和Varshney P K提出可变性指示CFAR(VI-CFAR)智能处理框架[7]。文献[8]提出的一种基于改进CFAR的检测算法对SAR图像进行海面溢油快速检测。文献[9]和文献[10]提出一种复合高斯分布下适用于高分辨SAR图像的快速CFAR算法。徐晶[11]提出一种用于SAR图像目标检测的模糊CAFR算法。这些方法主要针对目标测量参数更新率要求不高的机载或地面雷达目标检测。实现方面,赵冰等[12]在FPGA上实现GO-CFAR检测器,FPGA虽能减小处理时间,但不够灵活,不易调试修改。雷达信号处理一般采用通用DSP处理器,通用DSP芯片具有开发简便、使用灵活的优点,但处理速度相对较低,很难保证信号处理的实时性。
本文从提高处理效率角度出发,提出了一种距离、多普勒两个维度联合目标检测的双门限CFAR检测方法。该方法具有传统二维CFAR检测的优点,同时降低了运算复杂度,提升了DSP处理效率。
2 改进的CFAR检测方法
恒虚警检测是雷达目标检测的基本方法,弹载雷达导引头末段跟踪时接收数据多为距离-多普勒图像,典型单脉冲跟踪末段距离-多普勒图像如图1所示。
图1中,横向表示散射点所在距离单元,纵向表示散射点所在多普勒单元。雷达目标检测,即对图1中散射点进行逐一判断,通过统计待检测点周边信号能量,计算检测阈值K,待检测点能量与阈值K进行比较,大于K时判为亮像素点,反之为噪声或杂波,典型距离-多普勒图像CFAR检测方法示意图如图2所示。

图2 典型二维CFAR检测
图2中,圆点为待检测点,待检测点周围为保护单元,保护单元外侧为参考单元。
CFAR检测门限计算公式如下:

式(1)中,K为检测门限,T为标称化因子,Ai为参考单元内信号能量,P为虚警概率,N为参考单元点数。式(1)和式(2)中的主要运算量集中在式(1)中的∑Ai计算。
通过分析回波特性,待检测点周边杂波能量主要分布于所在距离单元两侧及所在多普勒单元两侧,为降低运算量,设计改进的二维CFAR检测方法,示意图如图3所示。
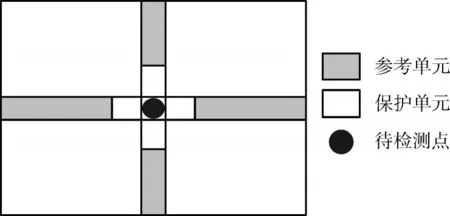
图3 改进的二维CFAR检测
改进二维CFAR检测门限计算同式(1)和式(2),保护窗和参考窗参数与改进前相同,参考单元选取图3中灰色部分。
距离向参考单元宽度为W,多普勒向参考单元宽度为H,距离向保护单元宽度为WP,多普勒向保护单元为HP,与传统方法相比,改进的CFAR检测算法单点检测时,减少的运算量为(2W+1)×(2H+1)-(2WP+1)×(2HP+1)-(2W+2H)个复数计算功率累加求和。对距离-多普勒图像逐像素点检测时,运算量减少非常可观。
3 算法仿真与实现分析
3.1 算法仿真
为了验证算法性能,采用相同的数据对传统和改进的CFAR检测方法进行了仿真,典型距离-多普勒图像检测效果如图4所示。

图4 检测效果对比
图4给出了典型距离-多普勒图像传统和改进二维CFAR算法检测效果图,图中中心位置亮像素点为地面停放的车辆目标,两种方法检测效果相同。
为了验证算法鲁棒性,对挂飞数据进行处理,检测结果如表1所示。

表1 挂飞数据处理结果统计
由表1统计试验数据中目标散射点检测结果可得,改进的CFAR检测方法目标散射点漏检概率为0,虚警概率约为2.19%。通过对数据进行分析,改进的CFAR检测性能与传统方法基本一致,虽产生了一定的虚警,但对目标跟踪结果并无影响,图5、图6、图7给出了目标参数(距离、方位角、俯仰角)测量结果对比。

图5 距离测量及误差

图7 俯仰角测量及误差
经统计,与传统二维CFAR检测相比,改进的CFAR检测方法引入测量误差相比指标要求:距离测量误差为4.74%,方位角测量误差为0.13%,俯仰角测量误差为0.6%。改进的CFAR检测方法带来的测量误差远低于指标要求,可以忽略。
3.2 实时性分析
为了验证改进CFAR算法的实时性,在TMS320C6678DSP平台设计并实现了两种CFAR检测方法。硬件板卡由一片K7 FPGA、一片TMS320C6678DSP、2片 S29GL512P13FFIV10 FLASH、4片IS43TR16256A X4 DDR3、接口电路、时钟电路、遥测图像LVDS电路和电源管理模块构成。平台硬件电路结构框图如图8所示。

图8 硬件电路结构框图
TMS320C6678是业界目前最高性能的定、浮点DSP,它采用KeyStone多核体系结构,内部集成8个最新的C66×DSP内核。设计中充分利用其8个内核,通过配置IPC中断实现多核同步控制。系统设计采用Core0作为输入输出核,接收距离-多普勒图像数据,Core1作为流程控制并完成运算量较小主核任务处理,Core2-Core7接收任务分配,完成多核并行的CFAR检测处理。各核间功能划分明确,核间耦合较小,便于程序移植和调试,图9给出了多核并行实现CFAR检测算法。

图9 多核并行实现CFAR检测算法
为了验证算法时效性,对试验数据进行处理,平均处理时间如表2所示。

表2 算法实效性对比
由表2可知,与传统CFAR检测方法相比,改进后CFAR检测算法处理时间由43.27ms缩短为13.76ms,处理效率提升约68.19%。
4 结语
本文针对弹载导引头距离-多普勒图像CFAR检测时效性问题,提出改进的二维CFAR检测方法,该方法在保证检测性能前提下,有效降低了运算量。仿真结果表明,与传统二维CFAR检测方法相比,目标检测性能基本一致,散射点检测虚警率约为2.19%;大幅降低了目标检测处理时间,目标检测时间由43.27ms缩短为13.76ms,处理效率提升约68.19%。该方法已通过某项目试验验证,满足弹载雷达目标检测性能和处理时间指标要求,可推广应用于处理效率要求较高的实际弹载雷达系统中。
