低成本MIMU车载组合导航联邦滤波算法*
2021-03-16
(海军工程大学导航工程系 武汉 430033)
1 引言
纵观未来战争发展趋势,无人作战设备因其强机动性、低成本和小体积等优势,有望取代士兵以及传统作战装备成为主要的作战力量之一,以今年沙特石油设施遭受低成本集群无人机袭击事件为例,带给我们的启示是低成本无人武器装备是未来战争形势的一个发展方向。随着作战任务日趋复杂,对无人车、无人艇等无人作战装备提出了更高的导航定位要求。对于高精度的惯性导航系统(Inertial Navigation System,INS)来说,高性能的惯性传感器与先进的系统技术可以提供载体高精度的导航信息,但体积大、价格贵、操作维护复杂,不合适在体积小、成本受限、工作环境恶劣的低成本、集群化的无人作战装备中推广使用。基于微机电系统(Micro Electro Mechanical System,MEMS)技术的微惯性测量单元(Micro Inertial Measurement Unit,MIMU)使这一问题得到了有效解决,以其低成本、低功耗、高集成度、抗高过载等特点[1~3],适合低成本无人设备的推广使用。但传感器自身存在精度低、漂移大等缺点[4~5],只能在短时间内提供可靠的信息,严重限制了MIMU的应用范围,利用组合导航技术提高基于MIMU的导航系统整体性能和精度已成为一种重要途径。随着MEMS惯性技术的快速发展,国内外均开展了以MIMU为核心的多传感器组合导航系统设计和研究。文献[6~7]以惯性/卫星组合导航方法为技术背景,研究了基于MIMU/GPS的低成本组合导航定位方案,通过改进滤波算法提高系统组合定位精度,但仍存在组合精度较差,尤其是复杂环境下的姿态估计精度。文献[8~9]针对MEMS惯性器件自身特点,通过引入磁力计和GNSS辅助信息,从而实现不同系统间的优势互补,但未考虑信息融合过程中子传感器失效或者故障的问题。
综上,本文以低成本无人车载导航实际需求为应用背景,通过多传感器信息融合以及信息故障检测,提出一种新的基于MIMU的低成本车载组合导航设计方案,实现MIMU、GNSS、MAG三者优势互补,提高以MIMU为核心的组合导航系统综合性能。
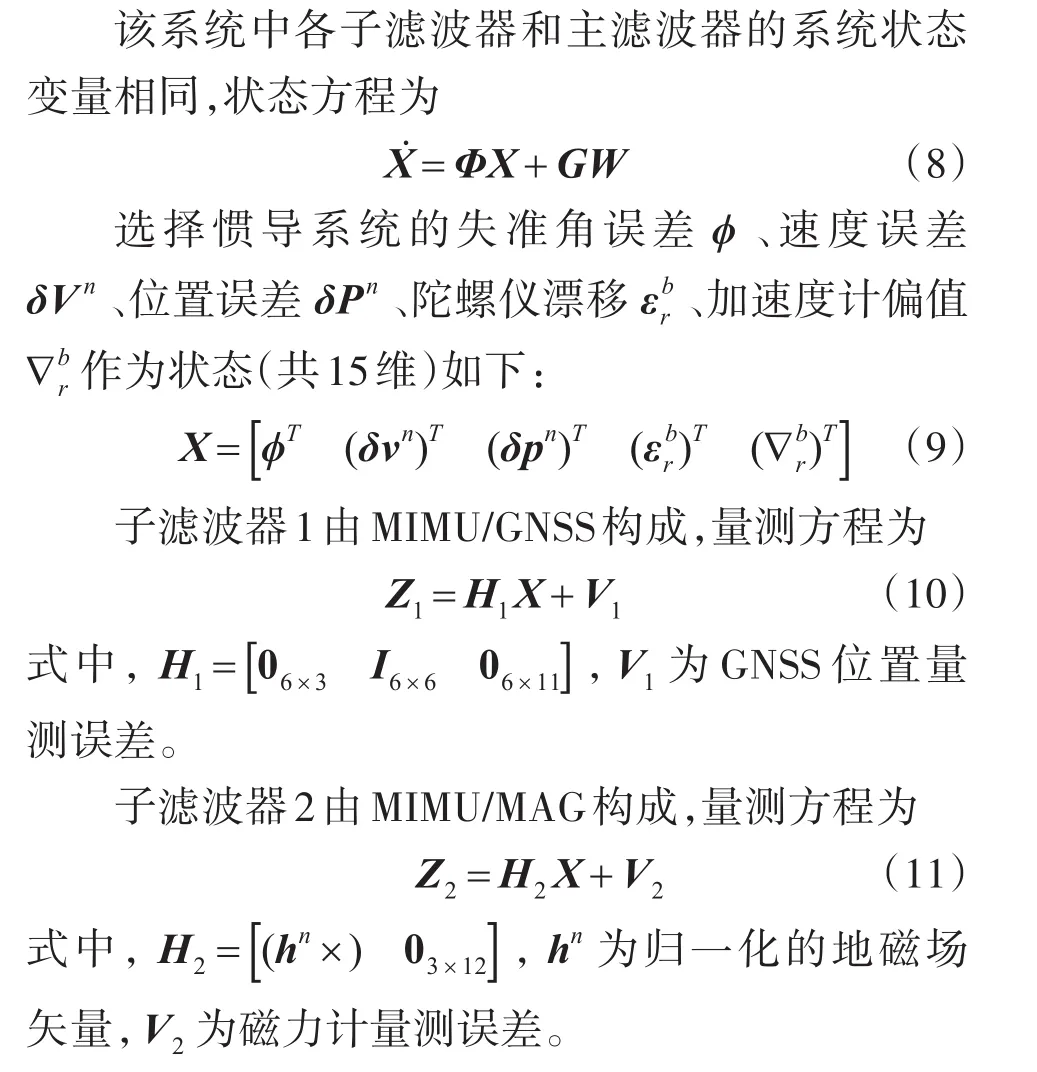
2MIMU/GNSS/MAG组合导航方案设计
要实现组合导航系统各传感器信息的优势互补,信息融合和滤波算法是关键,主要研究热点集中在如何进一步提高组合导航系统的精度、实时性和可靠性等方面[10~11]。目前,卡尔曼滤波技术常用于多传感器信息融合,按照信息处理方式的不同,分为分散式卡尔曼滤波和集中式卡尔曼滤波。联邦卡尔曼滤波是一种基于信息分配原理的分散式卡尔曼滤波,其主要优势有:
1)容错性能好。当子系统出现故障时,能够迅速检测和隔离故障子系统,且能够利用正常子系统的估计信息实现对状态量的最优估计。
2)计算量小。从子系统的局部滤波到全局滤波的最优估计算法简单,便于算法的执行。
典型的联邦卡尔曼滤波算法包含以下过程[12~13]:
1)滤波初始值设定。
2)时间更新。各子滤波器独立进行时间更新:

3)量测更新。各子滤波器接收子系统量测信息并独立进行量测更新:
4)信息融合。把各子滤波器的局部最优估计信息进行融合,方法如下:
为提高系统容错能力,设计无重置的联邦滤波结构进行信息融合,将MIMU作为主参考系统,组成MIMU/GNSS和MIMU/MAG两个子系统。该组合导航系统如图1所示。
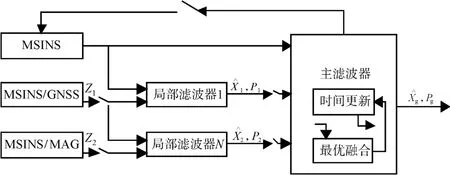
图1 MIMU/GNSS/MAG组合导航系统结构图
3 信息故障检测
利用组合导航技术提高导航系统整体性能已成为一种重要途径,但系统传感器的增加意味着整个组合导航系统的复杂性和故障率也随之增加,必须及时对传感器故障信息进行诊断并隔离,才能保证组合导航系统的可靠性。状态χ2检验法和残差χ2检验法常用于组合导航系统的故障检测与隔离[14],前者在状态递推的过程中没有进行量测更新,降低了故障检测的灵敏度,而后者对软故障的检测不十分有效。因此,这里采用新息序列检测法,利用最新的N个测量统计构成检验统计量来进行辨识量测信息偏差:

4 试验验证
4.1 仿真试验
为了验证MIMU/GNSS/MAG组合导航方案的有效性,在相同试验条件下:对比MIMU/GNSS、MIMU/GNSS/MAG两种组合导航方案性能。仿真试验模拟无人车实际作业环境,包含静止、加速、转弯等运动状态。仿真时间设置为600s,初始位置为纬度34°,经度108°,高度0m ;初始位置误差5m;初始航向误差为1°,水平姿态角误差为0.5°;初始速度误差 0.1m/s;陀螺仪偏差为10°/h(1σ),陀螺随机游走为1°/;加速度计偏差为0.5mg(1σ),加速度随机游走为;磁强计测量精度为50nT(1σ),地磁场模型误差为100nT;GNSS接收机定位精度为5m。
MIMU/GNSS、MIMU/GNSS/MAG两种组合导航方案估计误差结果如图2~4所示。

图2 姿态估计误差
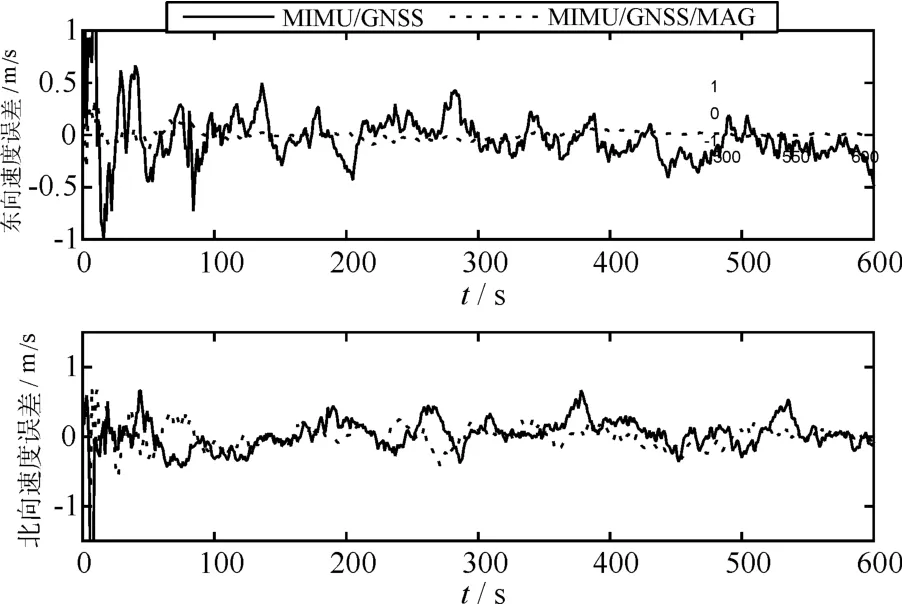
图3 速度估计误差

图4 位置估计误差
以姿态估计误差为例,误差统计特性如表1所示。

表1 姿态估计误差统计特性表
从仿真结果可以看出:最优的解决方案是MIMU/GNSS/MAG组合导航方案,该组合导航方案输出姿态误差小,且姿态估计能够快速收敛,其中水平姿态角误差在±0.5°范围内,航向角误差在±1°范围内。MIMU/GNSS组合导航方案处在水平方向加速度较小的运动状态时,由于航向角误差可观测性较差,所以姿态和航向角误差增大。
4.2 车载试验
为进一步对比两种组合导航方案的综合性能,在开阔地带进行车载试验。试验以某公司研制的型号为“KY-INS500U”的高精度光纤捷联惯性/卫星组合导航系统(简称“光纤惯导”)(航向姿态精度0.1°,水平姿态精度0.01°)作为参考;以预处理后的MTi-100惯性测量单元输出的陀螺、加速度计及磁力计数据作为解算数据,采用光纤惯导的卫星定位数据进行信息融合,初始对准数据由光纤惯导获得。
试验场景及设备如图5所示。试验方案为车载试验前,将MTi-100惯性测量单元与光纤惯导固定分别安装在车体内部,使二者航向保持平行且与车辆前进方向保持基本一致。试验车的起始位置选在无大功率电磁干扰的空旷环境中,以测试补偿车体本身对磁力计的干扰。GNSS天线安置在车顶,试验场地选在了空旷无遮挡的区域,以保证信号的正常接收,试验过程中GNSS收星数保持在13~26颗。

图5 试验场景及设备
MIMU/GNSS、MIMU/GNSS/MAG两种组合导航方案估计误差结果如图6~8所示。
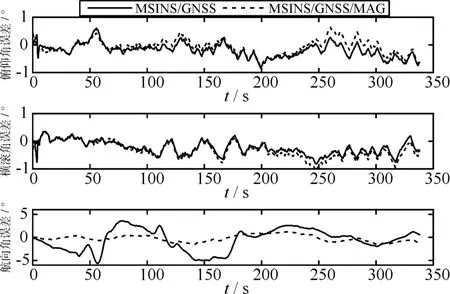
图6 姿态估计误差
以姿态估计误差为例,姿态估计误差统计特性如表2所示。
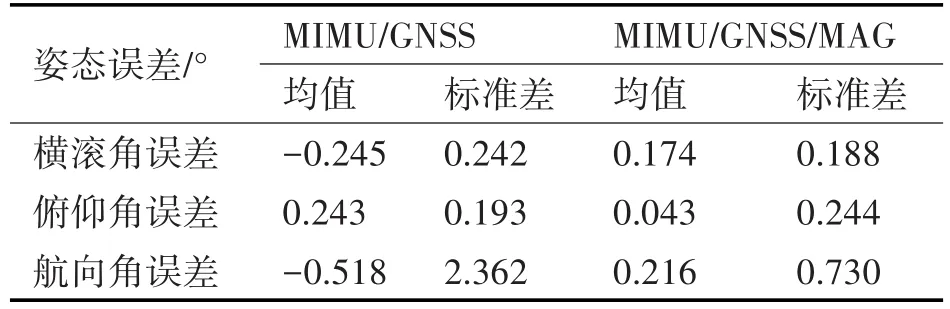
表2 姿态估计误差统计特性表
从试验结果可以看出:
1)相比仿真试验结果,两种组合方案的误差均有增大,分析原因可知,除了算法误差外,在车载试验的过程中,由于试验场地有细碎砂砾,且汽车本身发动机抖动,导致传感器处在振动频率较高的恶劣条件下,对MIMU中的陀螺零偏和加速度计偏值进行估计时发现,收敛后的估计结果均大于标称精度。
2)由于GNSS能够提供一个稳定的位置信息,所以MIMU/GNSS和MIMU/GNSS/MAG组合导航方案中位置和速度误差能够收敛,从图7、图8可以看出,MIMU/GNSS和MIMU/GNSS/MAG两种组合导航方案的速度和位置误差曲线基本重合,其中速度误差在±1.5m/s范围内,位置误差在±10m范围内。
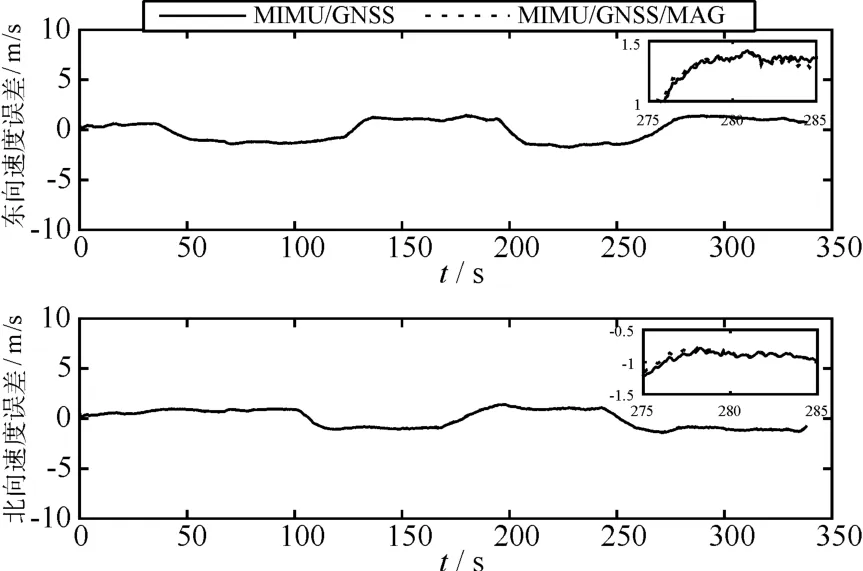
图7 速度估计误差

图8 位置估计误差
3)关于姿态估计,最优的解决方案是MIMU/GNSS/MAG组合导航方案,以航向角误差为例,MIMU/GNSS/MAG联邦滤波组合导航方案航向角误差能够抑制在±1.5°以内。从车载实验结果可以看出,引入校准后的磁力计信息可以有效提高组合导航系统的航向精度,验证了仿真试验的正确性。
4.3 容错试验
为验证该组合导航方案的容错性能,现模拟真实使用环境,设置故障条件如下:在第300s~320s,对GNSS定位结果中加入10倍量测误差的突变故障。按照设置的仿真条件对比MIMU/GNSS/MAG有无故障检测与隔离的组合效果。设置新息序列故障检测法的误警率为0.01,查χ2分布临界值表得对应的门限值为30.58。
故障检测效果如图9所示,从图中可以看出,该方法可以有效检测到故障,故障发生时间为300s~320s,该方法在301s~320s检出故障,延迟1s。

图9 缓变故障统计量
为进一步分析故障信息对组合导航系统性能带来的影响,现以导航误差为例进行分析。图10~12为进行了故障检测及隔离与未进行故障检测及隔离的组合导航系统误差曲线。

图10 姿态误差曲线

图11 速度误差曲线

图12 位置误差曲线
从图中可以看出,在GNSS发生故障期间,新息序列故障检测法由于及时检测出故障信息并进行隔离,导航信息误差发散得到抑制,现以位置误差为例进行说明。故障期间,未进行故障检测及隔离的组合导航系统北向位置误差在320s时达到最大为39.3m,东向位置误差在320s时达到最大为37.23m;进行故障检测及隔离的组合导航系统北向位置误差在320s时达到最大4.579m,东向位置误差在320s时达到最大为10.150m。
表3列出了结合有无故障检测及隔离的联邦滤波导航系统,在相同仿真试验条件下得到的导航信息误差标准差对比。可以看出,本文设计的组合导航方案,能够有效检测到故障并进行隔离,使整个组合导航系统受到故障量测量的影响更小。
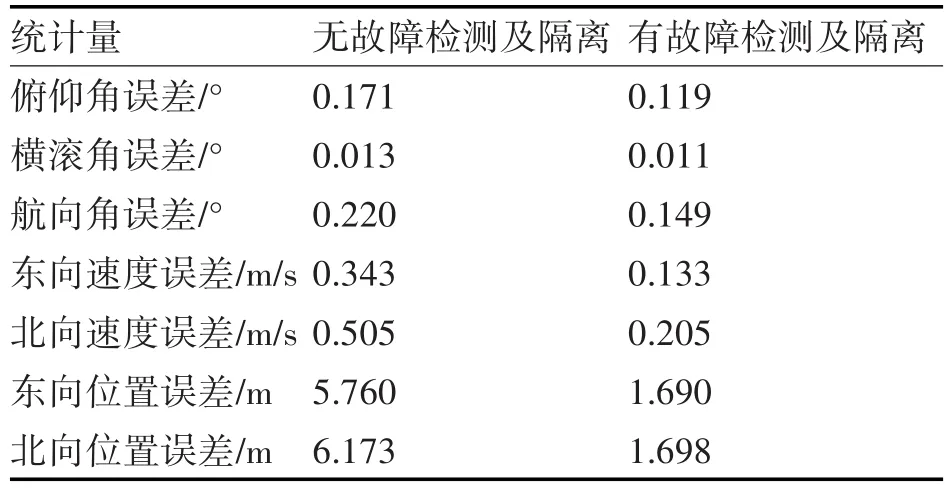
表3 导航信息误差标准差对比
5 结语
本文针对传统低成本车载组合导航方案中存在的姿态估计精度较差以及系统容错性较差等问题,从多传感器信息融合及信息故障检测两方面,设计了基于联邦滤波结构的MIMU/GNSS/MAG组合导航方案,能够实现不同系统间的优势互补,以提供复杂环境下的导航定位信息。试验验证了该方案能够有效提高低成本车载组合导航系统的输出精度和稳定性,有望解决单一导航方式精度低、可靠性差、抗干扰能力弱等问题,具有一定的工程应用价值。
