基于VDES的船联网移动自组织路由协议研究
2021-03-16张根彪宋蒙恩
胡 青 张根彪 宋蒙恩
(大连海事大学信息科学技术学院 辽宁 大连 116026)
0 引 言
随着海洋交通业的发展,ITU和IALA提出了VDES概念,并计划于2020年左右发布正式技术标准[1]。VDES能够在海事VHF移动波段内提供更高、更强的数据交换能力,满足了海洋通信业务的需求。VDES的提出为构建覆盖性强的新一代海上通信系统提供了技术基础,推动了船舶协同互联技术以及船联网技术的发展。船舶协同互联技术包含移动模型和移动自组织网络(Mobile Ad Hoc Networks,MANET) 路由协议两大部分,其中船舶移动模型为船舶协同互联技术的基础,MANET路由协议为船舶协同互联技术的核心。
移动模型是一种利用数学方式描述节点运动特征的工具,是真实节点运动特征的抽象体现。典型的移动模型可以分为随机移动模型、时间依赖模型、空间依赖模型、地理依赖模型、混合模型等[2]。在不同的实际环境中,节点具有各种移动特征,因此典型移动模型并不完全适用于所有场景。为了满足研究的需要,国内外通过分析真实节点的运动特征,结合现有移动模型的方式,设计出了各种移动模型。Rahman等[3]全面仿真并论证了不同网络环境对不同移动模型的性能影响,该研究对移动模型在现实场景中的应用具有引导作用。Liu等[4]通过研究人体运动状态的传递情况,在高斯-马尔可夫模型的基础上提出了一种能够揭示真实人体运动的移动模型——人体高斯马尔可夫移动模型。Solmaz等[5]通过分析人们在主题公园的活动规律,提出了一种能够较好匹配实际运动的新型主题公园人员流动模型。Bittner等[6]指出底层移动模型会对MANET路由协议产生很大影响,并根据现实场景的异质性等特征,提出了一种新的基于区域图的移动模型。
MANET是一种无固定基础通信设施、无中心控制的多跳无线网络[7],该网络抗毁性强,有极高的军用价值和商用价值。MANET路由协议作为MANET的重要组成部分,国内外也对其进行了广泛的研究。Surendran等[8]提出了一种基于质量约束的容错前瞻路由算法,在有效路由失败的情况下,协助选择备选路径,提升了协议中的路由决策能力。Han等[9]提出了一种自适应hello报文传输方案,抑制了不必要的hello报文,降低了路由的网络开销。Wahab等[10]提出了一种新型QoS聚类算法,利用QoS-OLSR协议解决了VANETs中的集群问题,有效地改善了路由协议的性能。Xia等[11]提出了一种基于信任的单播路由协议,为选择安全最短路由提供了一种灵活的方法,对协议在端到端时延方面的性能有很大提升。Zhang等[12]结合OLSR协议与改进的量子遗传策略,提出了一种新型路由协议——QG-OLSR协议,降低了网络开销,优化了协议性能。
综上所述,近年来国内外在移动模型以及MANET路由协议方面均做了大量的研究分析,对船舶MANET路由协议亦有一定的研究,但没有结合海洋环境及船舶运动特征。与此同时,VDES为海上船联网提供了良好的Ad Hoc网络环境,但目前国内外尚未有关于基于VDES的MANET路由协议的研究。因此本文在船舶移动模型的研究基础上,对现有MANET路由协议在VDES中的应用进行了理论研究及仿真分析,进一步给出VDES下的船联网系统最优路由选择方案。本文对VDES以及船联网的发展都具有积极的推动作用。
1 船舶移动模型研究
船舶移动模型是研究VDES自组织网络路由协议的前提。因此,为了保证船联网MANET路由协议研究的可靠性,建立一种恰当的船舶移动模型尤为重要。船舶移动模型设计的关键是根据实际船舶的运动特点抽象出节点运动规律,使模型中的节点具备真实场景中船舶的运动特征。
本文通过分析真实AIS数据,结合相关船舶理论知识,抽象船舶运动规律及船舶运动特征,综合现有移动模型,设计出了一种具有船舶运动特征的节点移动模型——船舶平滑转向的高斯马尔可夫移动模型(Ships Smooth Swerve Gauss-Markov Mobility Model,SSGM)。在具备船舶基本运动特征的基础上,进一步将海浪、气流、避让等影响船舶运动的因素作为模型的随机干扰因素,提升了模型与真实场景的相关性。
1.1 船舶运动分析
船舶在不同航行阶段具有不同的运动特征,为保证移动模型对船舶运动的准确描述,移动模型应以船舶运动特征为设计基础。船舶各种航行阶段具有以下运动特征:
1) 相关性:船舶当前时刻的运动与上一时刻相关,不存在船舶航行速度以及方向的突变。
2) 滞后性:受到海水、气流等自然因素的影响,舵手在进行船舶运动调节时,相关操作会有一定时间的延迟响应,船舶状态不会立即变化。
3) 滞留性:船舶到达港口后速度降为0;在港口,船舶需要滞留一段时间,以处理相关的港口作业。
4) 线性:船舶离港后逐渐加速,直至加速到理想速度才进入匀速运动状态。
5) 平滑性:船舶转向过程受到水的阻力及船舶自身的限制,符合大半径平滑转向的运动特征。
综合分析船舶运动特征可得:在上述航行阶段中,船舶均具备平滑移动的特性。平滑移动的特性符合高斯马尔可夫移动模型[13](G-M模型)节点的运动规律,因此本文以G-M模型为基础,结合船舶运动特点,设计出了一种SSGM模型。
1.2 SSGM模型描述
船舶固有操作包括变向操作和变速操作两方面。变速操作包含加速、减速、停车、倒车等方面的操作;变向操作包含船舶在转向过程中的一系列操作。通过结合船舶的运动特征及船舶固有操作设计出的SSGM模型,可用数学式进行表达,模型在各阶段具有以下不同的描述。
1.2.1加速航行阶段
加速阶段主要是指船舶从处于停车状态或直线运动状态,加速到理想速度的过程。在该过程中,船舶处于匀加速直线运动状态,考虑外在因素影响,模型附加了一定的随机扰动,其中节点运动方向的变化形式与G-M模型相似。
速度及方向更新公式为:
Vt+1=Vt+a·dt+Vn
(1)
(2)
位置坐标更新公式为:
(3)
(4)

1.2.2稳速航行阶段
船舶航行到理想速度后,由加速航行阶段转为稳速航行阶段。在稳速航行阶段中,船舶节点的运动速率以及航行方向相对稳定,基本保持匀速直线运动状态,但受到外在干扰因素的影响,节点的速度和方向会有细微的变化。在本阶段中,定期更新节点速度、航向等信息,实现节点运动状态的转变。
速度及方向更新公式为:
(5)
(6)
位置坐标更新公式为:
xbt+1=xbt+Vt+1·cos(θt+1)·dt
(7)
ybt+1=ybt+Vt+1·sin(θt+1)·dt
(8)

1.2.3旋回运动阶段
在本设计中,旋回运动阶段是指处于定速直线航行状态的节点进行转舵的过程。船舶受自身设计的限制及外在因素的影响,在转向过程中符合大半径平滑转动的方式。船舶旋回过程可以分为转舵阶段、过渡阶段、定常阶段,船舶在向某一目的地航行时很少有大于180度的转向,因此本文设定节点转向角度在180度以内。在转向过程中,船舶转向半径近似等于进距与滞距之差,其中:进距为旋回初径的0.6~1.2倍;滞距为船长的1~2倍;旋回初径约为船长的3~7倍。
综合上述分析,可以推导出船舶转向半径计算公式为:
R=1/2·coe·boat_len
(9)
式中:R为船舶节点的转向半径;boat_len为船舶节点长度;coe为转向直径与船长的相关参数。
节点左转与右转的操作类似,在位置更新计算方面基本一致,只在回旋中心方面存在一定的差异。节点变向的相关操作服从以下规律。
时间及角度更新公式为:
t=Δθ·R/Vt+1
(10)
(11)
1) 左转情况。
回旋中心计算公式为:
xr=xb-R·sin(θt)
(12)
yr=yb+R·cos(θt)
(13)
位置坐标更新公式为:
xb=xr+R·cos(θt+1+Δθ)
(14)
yb=yr+R·sin(θt+1+Δθ)
(15)
2) 右转情况。
回旋中心计算公式为:
xr=xb-R·sin(θt)
(16)
yr=yb+R·cos(θt)
(17)
位置坐标更新公式为:
xb=xr+R·cos(θt+1+Δθ)
(18)
yb=yr+R·sin(θt+1+Δθ)
(19)
式中:Δθ为节点更新坐标的角度偏移量;t为转向阶段中节点更新的时间间隔;xr、yr分别表示回旋中心的横纵坐标;xb、yb表示节点当前位置的横纵坐标;θt+1、θt分别为当前时刻及下一时刻的运动方向。
1.3 模型仿真分析
移动模型的仿真与分析包括MATLAB环境下个体移动模型的仿真以及NS2环境下节点的宏观移动仿真两个方面。MATLAB环境下,个体节点移动模型如图1所示;在一段时间内,真实船舶的航行轨迹如图2所示。个体移动模型的仿真通过检验节点运动特征的方式与真实船舶航行情况比对分析,验证模型中节点运动是否具备船舶航行特征;节点宏观移动仿真是指在多节点运动情景下的节点的运动仿真,记录节点运动相关信息,涵盖时间、位置、速度等方面,为后续通信协议的仿真分析验证提供场景支持。

图1 个体移动模型

图2 船舶节点真实航行轨迹
由图1可见,模型中节点的运动轨迹相对平滑,不存在拐点和断点的情况,节点主要以直线运动为主,在直线运动中存在细微的扰动。由图2可见,船舶从初始位置到目的地的航行过程中符合平滑移动特点;转向过程中,船舶转向半径较大、运行轨迹平滑;整体航行过程中,船舶节点多处于直线运动状态。综合上述分析可知,节点个体移动特征基本符合船舶移动模型的要求,满足了后续设计的需要。
本仿真平台通过NAM工具描绘实时移动节点的宏观分布,图3即为NAM工具描绘的节点初始时刻整体分布。NS2中的船舶分布模型的初始情况如图,其中数字及黑色实点均代表模型中的移动节点。在分配移动节点初始位置时,服从随机分布特性;运动过程中,符合个体移动模型的运动特征。节点的随机分布性与运动的规律性符合船舶的航行特征,基本满足了船舶移动模型设计的需要。

图3 船舶分布模型
2 MANET路由协议理论分析
MANET路由是源节点和目的节点之间建立恰当的通信路径的协议,促进了节点间的无缝连接,增强了系统数据传输能力。不同的MANET路由协议具有不同的适用场景,为了满足船联网的通信需求,对海洋通信系统及目前现存的路由协议深入研究分析十分必要。
VDES虽然在带宽上与AIS相比有很大的提升,但与大量的数据通信相比,仍然有限。因此选择或设计船舶路由协议时,要在满足可靠性的基础上尽可能降低协议的路由开销,以避免信道拥塞的发生,维护系统稳定。从近年来国内外研究中可以看出,目的节点序列距离矢量(Destination-Sequenced Distance-Vector,DSDV)协议、动态路由(Dynamic Source Routing,DSR)协议和AODV协议是各类协议中较为典型且性能较好的协议[15]。因此本文就上述三种路由协议,从理论方面给出了适用于海洋环境下的MANET路由协议。
DSDV协议[16]需要周期性地更新路由表,路由开销较大,特别在网络拓扑变化较快的网络中,需要采用更高的路由更新频率,路由开销随之急剧增加。因此,DSDV协议不适用于高动态网络。DSR协议[17]不需要节点维持路由信息表,在发送数据时,采用路由发现过程的方式建立路由,并将选用的路径直接附在数据报文中。该路由机制消除了无数据通信业务时的路由开销,但产生了相对较大的响应时延;每个数据包中包含完整路由信息,降低了带宽利用率;在路由表中存在路由陈旧的问题,对协议可靠性产生了一定的影响。因此,DSR协议适用于实时性要求不高、通信量不大且网络拓扑相对稳定的环境中。AODV协议[18]在有通信需求时,通过泛洪的方式建立路由,在节点数量较多时,路由开销逐渐增加;按需路由的方式,决定了节点在通信时会有较大的时延。因此,AODV协议较适用于实时性要求不高,数据通信不频繁的环境。上述三种MANET路由协议整体对比分析结果如表1所示。
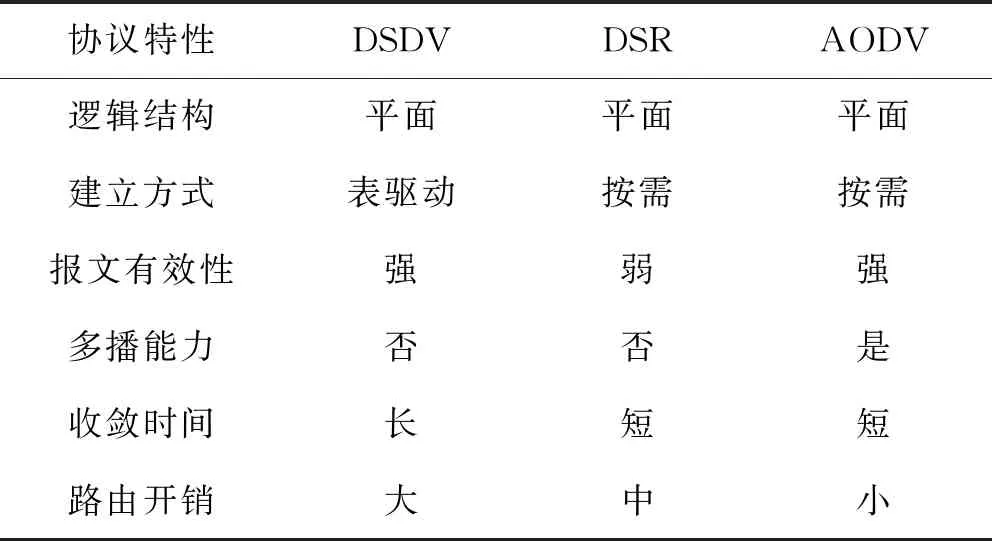
表1 路由协议性能对比
可以看出,表驱动路由协议的路由开销很大,收敛时间很长。船联网MANET路由协议是基于VDES研究的,VDES通信速率仅为307.2 kbit/s,随着路由开销的增大,系统的链路负载随之上升,增大了信道拥塞的风险,不利于系统的稳定,因此,表驱动路由协议不适用于海洋环境。在按需路由协议中,DSR协议的每个数据分组都要携带完整的路由信息,协议额外开销较大,网络带宽利用率相对较低,因此不适用于小带宽的通信场景。AODV协议只携带下一跳路由信息,带宽利用率较高,相对适用于带宽低的场景。由上述分析可知,AODV路由协议可作为VDES场景下的最优路由方案。
3 仿真测试及性能分析
AODV路由协议虽然在理论上论证了在海洋场景下的适用性,但缺乏VDES通信环境下的实际验证,为了充分论证协议的适用性,本文通过利用网络仿真平台仿真的形式验证了协议适用性,进一步为船舶MANET路由协议的改进奠定了基础。本文在仿真平台中,基于船舶移动模型,结合VDES特性,设计了海洋路由通信场景。针对分组投递率、端到端时延、归一化路由开销三方面分析了不同MANET路由协议性能。
3.1 VDES路由场景设计
本文为了更加真实可靠地模拟VDES通信环境,在设计路由通信场景中,数据包大小及数据传输速率均符合VDES通信标准的要求。VDES采用的时分多址接入(Time Division Multiple Access,TDMA)协议与本次仿真采用的载波监听多路访问/冲突检测 (Carrier Sense Multiple Access/Collision Detect,CSMA/CD)协议采用的均为时分复用的方式,虽然TDMA协议与CSMA/CD协议相比有更加严格的时间控制机制,能够有效降低用户过多时产生的数据冲突,减少数据报文的传输等待时间,使通信系统拥有更低端到端时延。但这两种接入方式对其他性能影响较小,因此本次仿真结果及分析可充当VDES环境下的协议评估。考虑到渤海区域广度较大且船舶节点分布不均的情况,本文通过控制同一场景下的节点数量模拟船舶的不同密度分布场景的方法,达到不同仿真场景设计的要求。
仿真场景建立时,仿真区域在实际场景的基础上按比例缩小,即场景在1 200 m×2 000 m的范围内设计。实验参数设置如下:节点最大速度为20节;通信数据包大小为672字节;节点停留时间为2 s;节点数量为50、100、150、200、250、300个;仿真时间为200 s;分组发送率为每秒4个数据包;通信距离为250 m。
3.2 分组投递率
分组投递率(packet delivery fraction,PDF)可作为船舶MANET路由协议可靠传输的评估参数,随着PDF逐渐提高,协议具有更可靠的数据传输能力。仿真环境中,目的节点接收数据分组量与源节点发送数据分组量的比值即为协议的PDF。PDF计算公式如下:
(20)
式中:NSP(Number of Send Packets)表示节点发送的分组数目;NRP(Numbers of Receive Packets)表示节点接收到的分组数目。
图4所示为AODV、DSR、DSDV三种路由协议在不同场景下的PDF。可以看出,随着节点数量的增加,路由协议的PDF整体呈下降趋势。AODV协议基本在不同仿真场景下,分组投递率均优于其他路由协议;DSR协议在150个节点之后,分组投递率急剧下降,该情况由DSR协议的报文中携带完整路由信息所导致。DSDV协议在PDF方面基本均低于其他协议,这是由于受即时路由交换所影响,在节点数目多或拓扑变化频繁的网络中,链路未能快速更新。

图4 分组投递率性能对比
海洋环境中,受到VDES通信速率的限制,对各类协议的PDF都有一定的影响,但从本次仿真可以看出,AODV协议在PDF方面性能最好,且相对稳定,平均投递率为85%左右;DSR路由协议次之,平均投递率为60%左右,但其波动性比较大,性能不稳定;DSDV路由协议性能最差,平均投递率只有50%左右,且波动性最大。
3.3 端到端传输时延
端到端传输时延(End-to-End Delay,EED)可作为船舶MANET通畅性的评估参数,伴随网络传输时延的降低,网络实时传输能力得到提升,系统通信质量愈高。仿真环境中,源节点发送数据分组与目的节点接收数据分组的差值即为传输时延,EED为传输时延的均值。传输时延及端到端传输时延计算公式如下:
D(i)=RT(i)-ST(i)
(21)
(22)

图5所示为三种MANET路由协议在不同场景下的EED。可以看出,随着节点密度的增加,三种MANET路由协议的EED整体呈先降后升趋势,这是由于在第一个场景中节点数量少、密度小,导致网络连通性较差,时延比较大;随着节点数量的增加,网络的连通性变强,时延也随之降低;但当节点增加过多时,网络规模变大,数据包传输经历的节点增多,进一步导致EED不断增加[21]。DSDV协议在无数据通信时就已建立好路由,因此进行数据通信时,网络时延最小。DSR协议与AODV协议虽然均采用按需路由的方式,但二者建立方式不同:DSR协议依据最短路由建立通信链路;AODV协议优选拥塞最轻的路由建立链路,致使其在EED方面基本低于DSR协议。

图5 端到端平均时延对比
海洋环境中,船舶分布特性及VDES通信速率对各类协议的EED均有一定的影响,但从本次仿真中可以看出,DSDV协议性能在EED方面最好,且相对平稳,平均时延仅有0.2 s;AODV协议次之,平均时延为0.5 s左右;DSR协议最差,平均时延约为0.6 s。
3.4 归一化路由开销
归一化路由开销(Normalized Routing Load,NRL)可作为船舶MANET拥塞程度的评估参数,随着NRL的降低,协议成本随之下降,网络带宽利用率不断提升。仿真环境中,所有节点发送的路由控制分组量与接收到的所有数据包量的比值即为NRL,其计算公式如下:
(23)
式中:NRC(Numbers of Route Control)表示节点发送的路由控制分组数目;NRP(Numbers of Receive Packets)表示节点接收到的数据分组数目。
图6所示为三种MANET路由协议在不同场景下的NRL。可以看出,随着节点密度的增大,三种MANET路由协议的NRL呈上升趋势。AODV协议具有较稳定的路由开销,且在不同的情况下基本上均低于DSR和DSDV协议,特别是在节点大于200后,AODV协议开销远低于其他两种协议。节点数目低于150时,DSR协议具有较低的NRL;节点数目大于200后,协议开销急剧增加,这是由于其携带完整路由信息,网络规模的增大,数据报文能携带的有效数据信息减少所导致。DSDV协议开销基本高于其他两种协议,且在不同场景下存在很大的差异:节点数量小于200时,开销维持在700以内;大于200后,开销激增到1 800左右。DSDV协议的定时更新路由机制是协议开销较大的根本,特别是随着网络规模以及节点运动速度的增大,协议开销随之急剧增加。

图6 归一化路由开销对比
海洋环境中,受VDES传输速率及数据报文大小的限制,路由协议在路由开销方面会受到很大的影响。从本次仿真中可以看出,AODV协议的路由开销最小且最平稳,均在60以下;DSR协议在节点增大时存在较大的跳变,平均NRL为470;DSDV协议开销增长迅速,平均协议开销高达1 000。
3.5 总体性能分析
综上研究分析可知,基于VDES的海上MANET路由协议研究应以协议的分组投递率为基础,以协议的路由开销为重要考虑方面。MANET路由协议总体性能分析如表2所示。
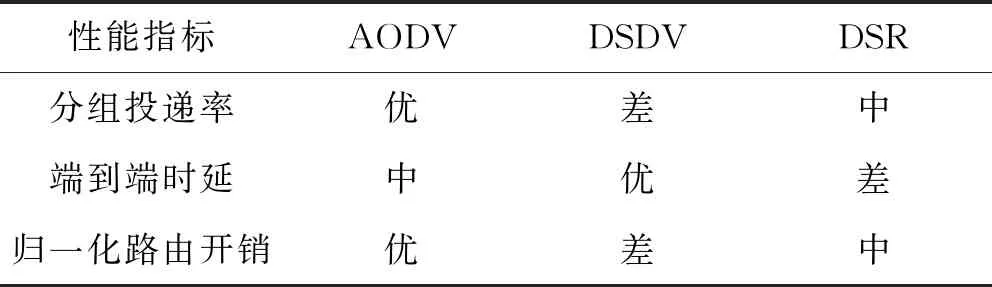
表2 MANET路由协议总体性能分析
由表2可知,AODV路由协议较高的PDF和较低的NRL适应了海洋通信中的VDES的低带宽特性,较低的EED满足了系统实时性的要求,可见AODV协议较好地满足了海上船舶通信的需要,因此本文建议采用AODV协议作VDES下船联网系统的最优路由方案。
4 结 语
本文针对基于VDES的海上路由协议及船舶分布模型进行了研究设计与分析。在船舶移动模型方面,提出了一种符合海洋船舶运动特征的移动模型;在VDES路由协议方面,采用对现有路由协议的理论分析及仿真验证的方式,寻求了一种较适用于VDES的MANET路由协议。
研究分析表明,AODV路由协议适用于海上船舶通信场景。但船舶分布模型没有充分考虑航道等因素的影响,还需要对移动模型作进一步研究。因此下一步将继续针对船舶分布、运动特性、运动场景等方面进行研究,增加船舶在实际场景中的限制条件,加强模型与实际场景的联系,以搭建与实际更相关的船舶移动模型,进一步为设计出完全符合海洋环境下的MANET路由协议奠定基础。
