水轮发电机组励磁误强励故障的分析及处理
2021-03-15陈冲
陈 冲
(乌东德水力发电厂,云南 禄劝 651512)
强励功能是发电机励磁系统的重要指标之一,强励对于改善、提高发电机的暂态稳定性,改善电力系统运行条件,提高继电保护装置动作的正确性起着重要作用[1]。而误强励对发电机的安全运行具有极大的危害性,在实际运行的发电机中存在着许多可能引起误强励的因素,这将严重危害发电机的安全运行[2-3]。在某大型水电站机组调试过程中,励磁系统在发电机甩负荷和动水落门停机试验中都发生了误强励的情况,分析这种误强励情况的发生是由于励磁程序角度计算子程序没有采用跟频算法造成的。
1 误强励故障分析
1.1 误强励故障过程
在机组甩350 MW负荷试验过程中,当甩掉负荷转速上升至120%时,励磁系统收到“逆变退励磁”令,之后励磁系统误强励,直至定子过压保护动作,直流灭磁开关跳闸灭磁。
在机组动水落门停机试验中,当励磁系统逆变一段时间后,逐渐又转入整流态,励磁电流上升,最高至1.7倍额定值,之后过激磁保护动作,直流灭磁开关跳闸灭磁。
1.2 误强励故障分析
1.2.1 过速时逆变导致误强励
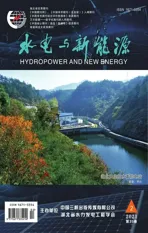
机组甩负荷过程中,投逆变令后,本该急速下降的励磁电流实际上却是在逐渐上升,直至保护动作,事件波形见图1。
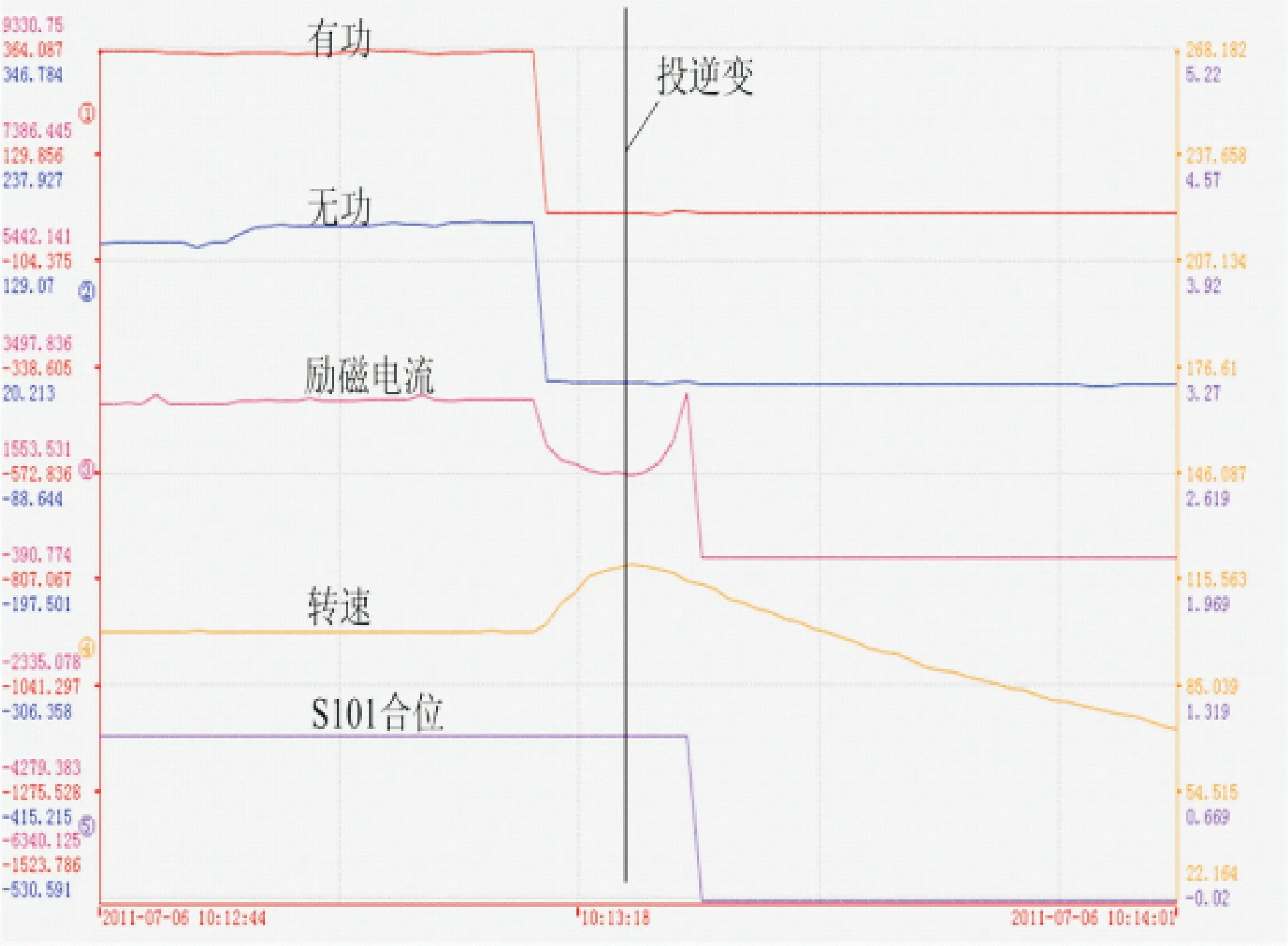
图1 机组甩负荷时误强励波形图
1.2.2 低转速时逆变导致误强励
机组动水落门过程中,投逆变后励磁电流下降,但下降速度随着转速的降低越来越慢,直至开始缓慢上升,且上升速度随着转速的降低而加快,从而形成了误强励,事件波形见图2。
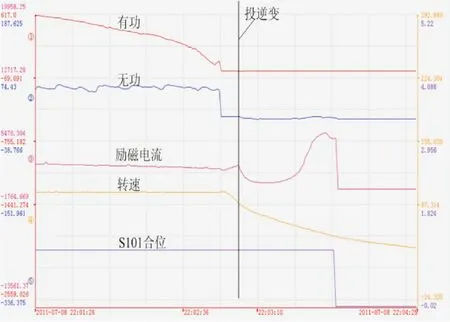
图2 机组动水落门试验中误强励波形图
1.2.3 触发角与机组频率的关系
对于带转子(电感)的三相可控硅功率整流柜,当触发角α满足0°<α<90°时为整流状态(励磁运行时),90°<α<180°为逆变状态(励磁退出时)。可控硅在触发角接近180°时因换相裕量角太小有失控(逆变颠覆)的可能[4],所以实际允许运行的范围一般为5°<α<170°,该励磁调节器设定的范围为10°<α<150°。
触发角在励磁系统中是以触发脉冲时间的形式来实现的,即脉冲在一个周期内的出现位置tα[5]。该励磁程序中计算触发脉冲时间以50 Hz作为基准,tα和设定触发角αreg的关系如下:
(1)
实际触发角αact则跟同步频率fact相关:
(2)
由(1)和(2)可得:
(3)
逆变时触发角满足90°<α<180°,当频率过低时,αact可能小于90°而进入整流区;当频率过高时,αact可能大于180°即进入下一周期的整流区。即逆变时频率过高或过低都会使励磁系统实际上为整流运行,即误强励。
1.2.4 故障原因
通过对脉冲算法的分析,由于该机组励磁系统在计算可控硅触发角时不是跟踪实时频率,而是固定以额定频率50Hz来计算,所以当实际频率与额定频率不同时,实际的触发角也会改变。现场甩负荷试验过程中机组频率升高,同时调节器收到逆变信号,触发角度置逆变角150°,由于频率升高幅度过大导致对应触发角度大幅上升超过180°从而进入整流区,导致误强励。同理,在快速落门停机时由于频率大幅降低,触发角度大幅减小低于90°从而进入整流区,导致误强励。两次误强励故障都是由于实际频率与额定频率相差太大,导致逆变时实际的触发脉冲并未落在逆变区而是落在整流区,从而增加励磁电流形成了误强励。简言之,在原程序下运行,转速过高或者过低时投“逆变退励磁”都会导致励磁误强励。
2 解决方法
2.1 修改触发角度计算方式
通过以上分析得出,该机组励磁系统在调试过程中出现的两次误强励事件均是由触发角度计算不跟频的问题引起的。现将空载下触发角度计算方式更改为同步智能跟频,即在机端电压20%以上由固定频率改为跟随实际频率,20%以下采用固定频率50 Hz,确保自并励下同步电压过低测频不准时触发角的可靠触发,提高50 Hz下起励和逆变的可靠性。负载下触发角度计算仍然采用固定频率50 Hz,主要考虑负载下频率不会有大幅变化,同时保证角度计算的可靠性。
2.2 试验验证
2.2.1 机组低频条件下逆变试验
发电机空载额定运行,调速器改变发电机频率到41 Hz,励磁系统现地逆变停机,试验波形见图3。
通过录波观察,励磁系统在低频条件下整个逆变功能正常,机端电压20%以上时,角度计算频率跟踪正确,转子电流、机端电压平缓下降;机端电压下降至20%后角度计算转为固定频率50 Hz,逆变功能正常。
2.2.2 发电机组高频条件下逆变试验
发电机空载额定运行,调速器改变发电机频率到60 Hz,励磁系统现地逆变停机,试验波形见图4。
通过录波观察,励磁系统在高频条件下逆变功能正常,机端电压20%以上时,角度计算频率跟踪正确,转子电流、机端电压平缓下降;机端电压下降至20%后角度计算转为固定频率50 Hz,逆变功能正常。
后期分别经过机组700 MW甩负荷和动水落门试验验证,励磁系统角度计算频率跟踪正确,各变量状态正常。
图3 机组低频40 Hz逆变图
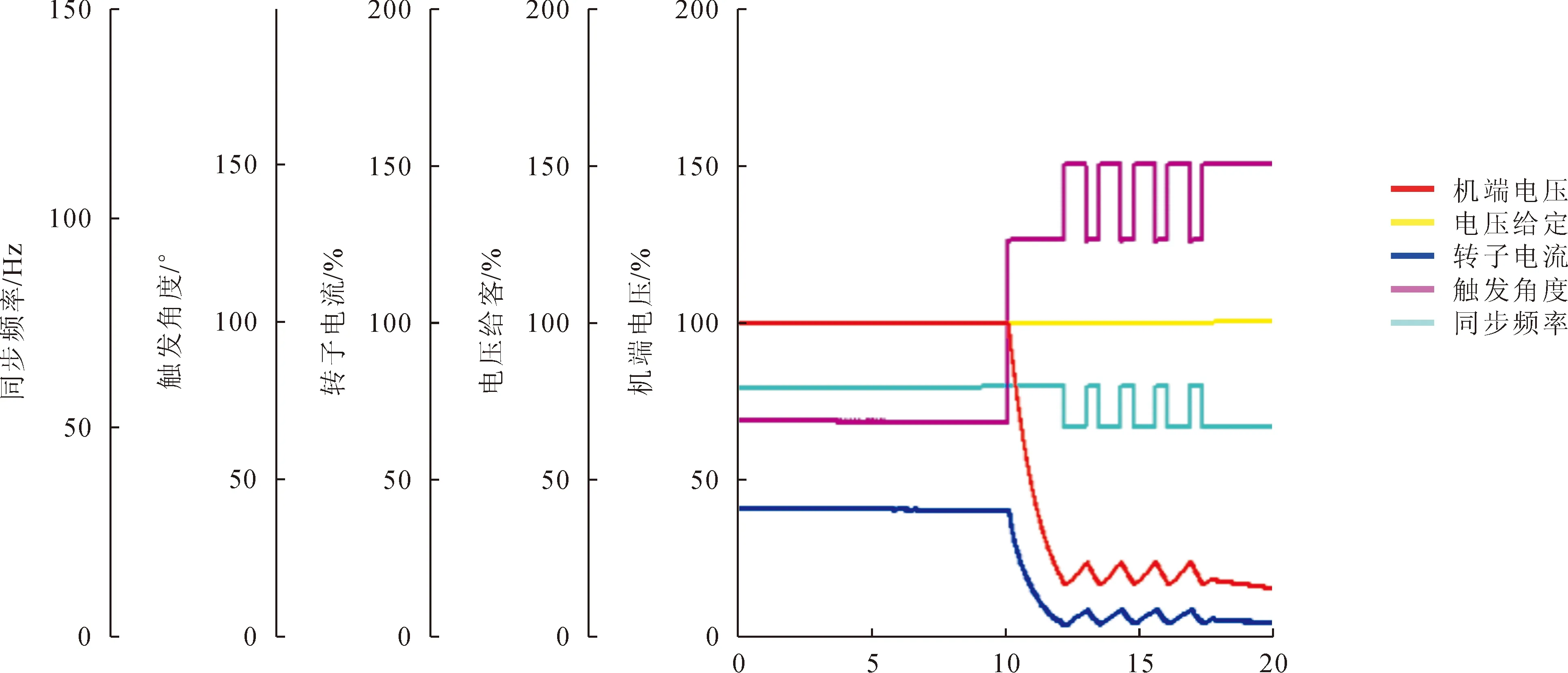
图4 机组高频60 Hz逆变图
3 结 语
该电站机组励磁系统设计之初考虑机组正常并网运行时频率不会发生大幅变化,角度计算程序采用常量较采用变量可靠性高,固将角度计算设置为跟踪固定频率以提高并网运行的可靠性。而当机组在空载状态下进行甩负荷和停机时频率会出现大幅变化,跟踪固定频率算法已不能满足实际工况要求,才会出现上述问题,在这种情况下应该采用智能跟频的算法。为了更好地帮助相关从业人员分析和解决相关问题,我们结合水电站实际案例进行了分析,并提出了预防措施,希望对相关设计和维护人员有所帮助。