载人航天器仿人型机械臂系统发射过程抑振特性试验研究
2021-03-15刘冬雨
张 峤,刘冬雨,罗 超,郑 昊,吴 冰,李 喆
(北京空间飞行器总体设计部,北京100094)
0 引言
“天宫二号”空间实验室舱内搭载了机械臂操作终端系统(以下简称“机械臂系统”)。在空间实验室与载人飞船组合体飞行期间,“神舟十一号”航天员乘组与机械臂系统配合完成在轨维修试验,为航天员与空间操作机器人的人机协同作业积累在轨经验,为提高空间站机械臂精细操作能力和控制鲁棒性提供在轨基础方法和参数。
机械臂系统的核心是一套仿人型机械臂/手。它由大量精密电子元器件及高精度传动环节构成,并且在发射上行过程中要经历振动、冲击和加速度等一系列复杂而严酷的动力学环境。若不能对这些恶劣的力学载荷进行抑制,则机械臂可能会受损而无法有效完成在轨精细操作任务。为了保证航天员的在轨安全,舱内机械臂系统无法采用传统的火工品压紧解锁上行方案。考虑到载人航天器的人机协同特性,以NASA 的Robonaut 2为代表,舱内机器人/机械臂通常采用包装上行、航天员在轨安装的方案。这种技术途径的工程实用性较强,还可避免火工品解锁对精密部组件的冲击影响。
在工业设计领域,发泡聚乙烯材料(EPE)以密度小、回弹性好且具有良好的吸能特性等优势得以广泛使用。国外学者对EPE的力学行为进行了广泛研究:Loveridge等指出EPE 具有稳定的抗冲击性能,并就气孔尺寸、冲击速度对EPE 的最大疲劳应力值的影响进行了研究;Marcondes等就温度对EPE缓冲特性的敏感度进行了理论分析;Ruiz-Herrero等研究了不同密度的EPE 的抗冲击力学特性,并建立了几种简单的理论模型;Mills等采用有限元模型,预测了复杂形状EPE 的缓冲性能。国内卢富德、高德、张炜等学者对EPE的力学特性进行了大量的理论及实验研究,得到了从单自由度到多自由度包装系统的缓冲特性,为包装设计提供了普适方法。在载人航天领域,朱恩涌等探讨了隔振器以及隔振对象的刚度系数、阻尼系数、质量对隔振效果的影响,得出了相关设计原则,为航天器被动隔振系统设计提供了参考。
上述研究对载人航天器的精密机电设备上行方案设计提供了较坚实的理论基础,但未开展工程型号实践。本文设计了一种基于EPE的减振软包方案,并对该方案在“天宫二号”机械臂系统的应用有效性进行验证。
1 “天宫二号”机械臂系统简介
“天宫二号”机械臂系统是一种典型的仿人型机械臂系统(如图1所示),它由1个六自由度机械臂、1个15自由度机械手、1个手眼相机及相关电缆构成,质量约为20 kg。机械臂系统配置了位置、力、关节力矩、视觉等多种传感器,具有丰富的感知能力,可实现高精度位置控制、自主柔顺操作,以及航天员在轨或地面遥操作等。
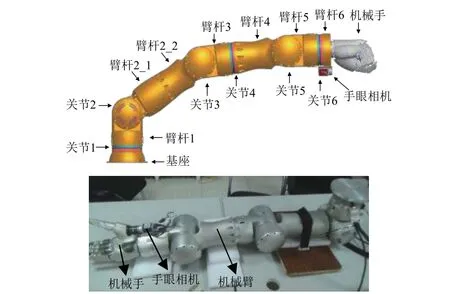
图1 “天宫二号”机械臂系统模型及实物照片Fig.1 Model and photo of Tiangong-2 manipulator system
机械臂采用模块化设计,由2个肩部关节、2个肘部关节、2个腕关节构成,多个连接件将6个模块化关节连接,构成机械臂。模块化的肩、肘、腕关节具有相近的结构;根据关节承载需求,在电机和谐波减速器的选型上有所不同。传感器配置及关节电气系统是相同的,采用直流无刷电机+谐波减速器的驱动和传动方案。
机械手同样为仿人型设计,其质量约为人手的1.2倍,是本系统的末端执行机构。五根手指(每根手指含2个俯仰自由度及1个侧摆自由度)的指单元体完全相同,每个手指模块中包含1个扁平直流无刷电机和1个微型谐波减速器。电机与减速器之间采用高速传送带连接。多种类型传感器集成在手指体内,指骨和远节指骨的运动通过钢丝传递,实现1:1的耦合运动。
“天宫二号”机械臂系统比传统6~7自由度机械臂更复杂、更灵活,传感系统更丰富,其飞行任务是完成一台单机设备的在轨维修操作,包括机械手直接旋拧J599电连接器、撕开多层隔热材料、机械手抓握电动工具旋拧螺钉等,每项任务的操作精度要求均在3 mm以内。这不仅对系统的绝对定位精度和重复定位精度均提出了极高的要求,也对发射上行载荷的振动抑制提出了更高要求,因为任何一个自由度(共21个活动关节)的功能失效都将对机械臂系统的总体精度和作业带来巨大影响。
2 减振软包设计方案
为了保证航天员的在轨安全,并考虑到载人航天器的人机协同特性,采用软包装载的方式实现束缚上行,航天员在轨将机械臂从软包中取出,安装至工作工位。由于“天宫二号”机械臂系统研制立项于“天宫二号”空间实验室正样研制阶段,舱内设备布局已基本确定,机械臂软包的上行布局位置受限严重。为了适应舱内仪器板剩余的已有孔位,软包与剩余空间赋形设计,整体为类L 型,长度约1.1 m,截面为矩形,软包可通过拉链对称打开,如图2所示。
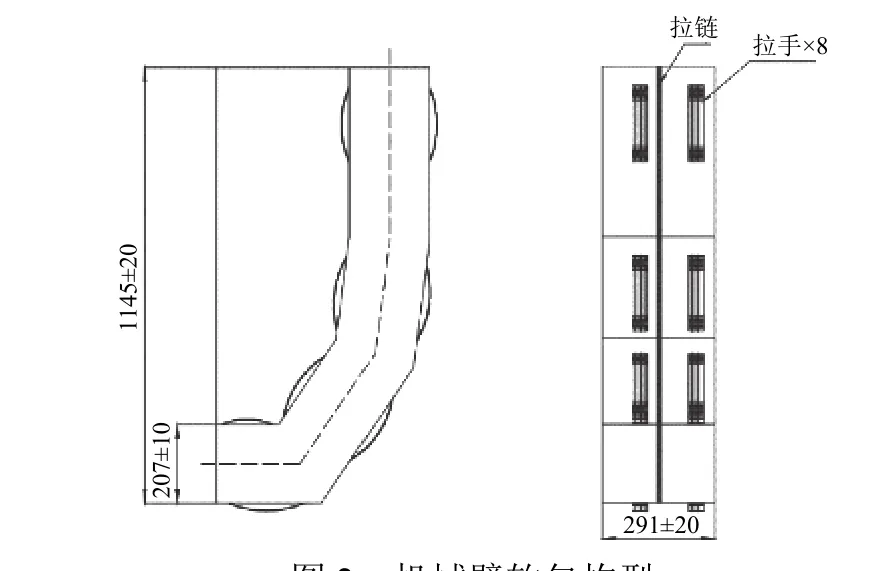
图2 机械臂软包构型Fig.2 Configuration of soft package for the manipulator
装载产品后,机械臂包总质量约24 kg。这种质量大、长径比大的精密机电产品通过软包捆绑上行,在我国当时的载人航天领域尚属首次工程应用。研制技术人员采用6条宽束缚带+1条窄束缚带将机械臂包捆扎束缚在仪器板上,如图3 所示。为了使得束缚带与软包紧密贴合,软包上表面设计了束缚带限位扣,下表面缝制尼龙搭扣,方便航天员在轨临时放置。
由于机械臂、机械手为外形不规则产品,因此将设备在软包内可靠固定是抗力学载荷的关键。采用厚度为25 mm 的EPE材料作为软包主支撑结构,并在臂杆2、臂杆4、臂杆6、机械手与软包缝隙内增加厚度20~60 mm 不等的EPE 垫块作为辅助填充(如图4所示)。为了更好地完成包内赋形设计,采用3D打印轻质件进行配装。为了便于航天员在轨存放,软包整体为可拆卸结构,所有模块均通过尼龙搭扣粘接拼装而成。

图3 机械臂软包上行布局状态Fig.3 Launching condition of the manipulator with soft package

图4 机械臂软包主构型Fig.4 Main structure of soft package for themanipulator
3 软包减振能力力学环境试验验证
就参试产品本体而言,“天宫二号”机械臂系统共21个自由度;从边界条件考虑,软包内各缓冲材料间采用搭扣粘接,机械臂、机械手在软包内为绑扎束缚状态,软包整体在舱内也是绑扎束缚状态。这些因素均对建立系统的力学预示模型造成较大困难。为了快速验证软包对于机械臂承载的缓冲作用,利用初样机械臂及软包,通过力学环境试验对软包减振能力进行摸底验证。
3.1 地面试验系统
在90 kN级振动台上进行了机械臂系统及软包(以下简称“机械臂包”)的力学环境试验。试验系统主要由T2000-T4电动振动台、SA1120高效功率放大器、ST/T2000水平滑台、JAGUAR 数据采集分析与振动控制系统组成。
为了更加真实地模拟机械臂软包的力学边界条件,将上行支架与软包共同开展力学试验,软包支架在振动模拟墙上的安装接口与在舱内仪器板上完全一致。软包在支架的安装平面内的位置束缚通过三角托、耳片限制,在面外的振幅通过束缚带绑扎限制,如图5所示。
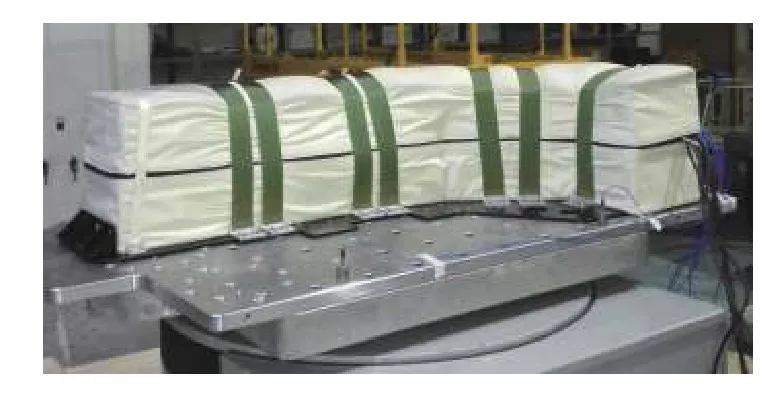
图5 “天宫二号”机械臂包力学试验状态Fig.5 Mechanical test for Tiangong-2 manipulator and its soft package
机械臂包验收级力学试验条件如表1~表3所示。

表1 机械臂包正弦振动试验条件Table1 Sine vibration test conditions for thesoft package
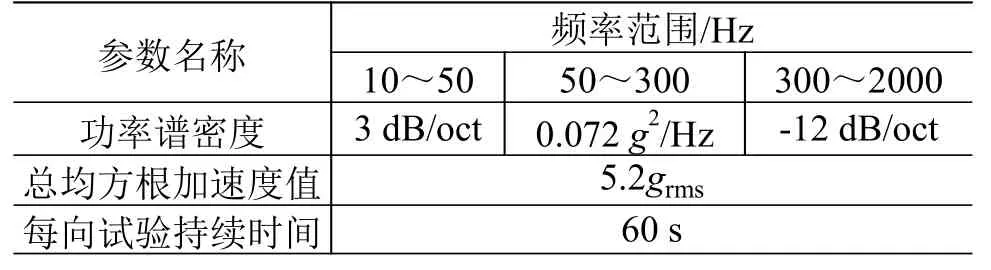
表2 机械臂包随机振动试验条件Table 2 Random vibration test conditions for the soft package
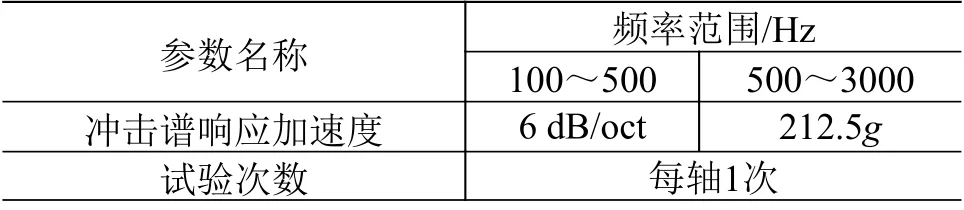
表3 机械臂包冲击试验条件Table3 Shock test conditionsfor the soft package
试验共设置10个Pcb Piezotronics 356A34型三向加速度传感器,其中机械臂、机械手上测点7个,支架上测点3个。软包内测试电缆沿机械臂束缚,从软包拉链头部缝隙处引出。测点位置及试验方向如图6所示。振动试验采用四点平均控制。
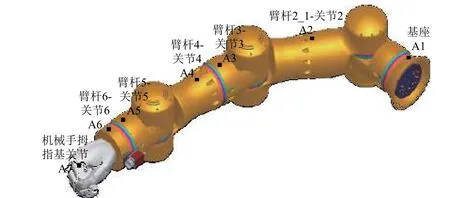
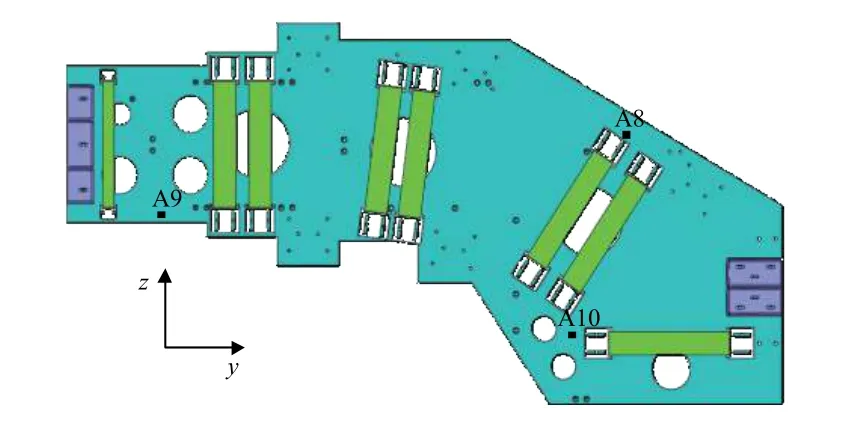
图6 机械臂及软包力学试验测点位置Fig.6 Positions of sensors in mechanical test for Tiangong-2 manipulator and its soft package
3.2 试验结果
3.2.1首轮试验
以摸索软包力学特性及其对机械臂减振能力摸底为目的开展首轮振动试验。6条宽束缚带绑扎软包完毕后,尾部剩余长度约270 mm,对应软包侧壁主结构EPE 最大预压缩率为70%(即主结构泡沫厚度从25 mm 压缩至7.5 mm)。典型试验结果如表4所示,本文仅对主振方向进行分析。由于机械手的每根手指都可看作是一个小型的机械臂,其驱动、传动环节更加精密,内部芯片集成度更高,所以机械手是整个机械臂系统中的最薄弱环节,需重点关注其响应特性,结果见图7。

表4 首轮振动试验典型测点加速度响应Table 4 Typical acceleration response in the first round vibration test

图7 首轮正弦振动试验机械手加速度响应Fig.7 Acceleration response of the dexterous hand in the first round sine vibration test
从图7可以看出,对于面内横向振动,软包对机械手的抑振效果较好。其中y 向与z 向的放大倍数分别为1.38 及2.45。结合表4可知,这两个方向在随机振动中,最大响应总均方根≤1.35g,均小于振动台的输入条件5.2g。实际上,软包本身可考虑为一个低通滤波器,对于高频振动有较好的过滤能力。
然而对于面外(x 向)振动,机械手最大响应高达43.2g(17.8 Hz),放大倍数为6.35,超过30g 的设计承载能力。考虑到对于面外振动,软包只能依靠束缚带的捆扎进行束缚,因而初步判断可能是由于机械臂、机械手在软包内束缚不够紧凑,产品与EPE泡沫的赋形不够贴合,导致软包减振效果不明显。因此,将束缚带进一步拉紧,将尾部剩余量从270 mm 拉伸至300 mm(软包侧壁主结构EPE 最大预压缩率增大至100%,即主结构泡沫厚度25 mm被完全压缩),重新进行试验。结果发现最大频响后移至约25 Hz,各测点响应幅值增大约8%~10%,未达到降低载荷的目的。
分析可知,6条束缚带绑扎位置均为臂杆而非关节,而关节2、关节3与关节5这3个平行关节作为较大的集中质量点,对机械臂的振动加速度贡献显著。当前的试验软包并未对这3处关节进行额外限制,导致这3个大质量点带动整臂在包内上下窜动。因此,无论如何增加束缚带的约束力,整臂在软包内与EPE泡沫的贴合均不会太好。
首轮试验后,对机械臂、机械手依次进行了单关节驱动及精度测试,机械臂、机械手状态基本正常,但机械手拇指与食指的侧摆自由度出现传动皮带松弛现象。这与在x 向振动时机械手响应过大是一致的。此种状态的机械手执行接触类操作任务的可靠度低,因此需要对软包进行优化设计。
3.2.2 软包优化设计
根据首轮试验结果,在已有软包的基础上增补了8块赋形限位模块对关键部位进行重点保护,材料选用硬度稍高的低发泡聚乙烯闭孔泡沫,即图8中的黑色模块。其中,机械手处的赋形结构较复杂:除对机械手外壳进行约束外,还加强了各手指模块的侧摆自由度限制,以达到减小间隙的目的。

图8 改进后软包示意Fig.8 Theimproved soft package
对于软包而言,束缚带约束得越紧,整体的刚度越高,导致共振频率后移;但同时,软包主结构泡沫的压缩量也增大,软包的阻尼性能变弱,因此振幅A增大,这与文献[13]的结论是一致的。这表明束缚带对软包的约束并非越紧越好,在满足捆扎安装可靠的前提下,寻找泡沫最优预压缩率对于确定软包减振状态是十分必要的。
3.2.3软包优化后试验
将机械臂、机械手装载入改进后的软包中,开展第二轮试验。首先利用x 向试验对束缚带捆扎状态进行确认,共开展了3 组特征级扫频测试(输入为2.04g),结果如图9所示。可以看出,机械臂包基频随束缚带的拉紧而升高,同时振动加速度响应增大,这与3.2.2节的分析结论吻合。
图9 软包减振效果随束缚程度变化趋势Fig.9 Vibration suppression effect of the soft package against the degree of restraint
当束缚带尾部剩余量为300 mm 时,对应侧壁主结构泡沫局部预压缩率为100%(即被完全压缩),该工况下机械手响应放大3.8倍,外推至验收级振动工况,机械手响应仍会超过25g,并未到达最优减振效果。当束缚带尾部剩余量为250 mm 时,对应侧壁主结构泡沫局部预压缩率为50%(即主结构泡沫厚度从25 mm 压缩至12.5 mm),该状态下机械手响应放大2.9倍,外推至验收级振动工况,机械手响应约为20g,同时软包本体也能被可靠束缚,满足各种约束要求。以上证明软包的优化策略是有效的,后续试验对该束缚状态进行固化。
第二轮验收级试验典型结果如表5所示,机械手响应曲线见图10。与首轮试验结果(表4)对比可知,6条宽束缚带剩余长度保持250 mm,各方向最大频响前移0.5~2 Hz。在验收级试验条件下,机械手在x 向与z 向试验中响应峰值均降低了约50%,最大加速度响应为21.8g,同时其余各关节测点响应也得到了40%~50%的改善。这进一步验证了软包优化方案的有效性。

表5 第二轮机械臂包振动试验响应Table 5 Typical acceleration response in the second round vibration test
图10 第二轮正弦振动试验机械手加速度响应Fig.10 Acceleration response of the dexterous hand in the second round sine vibration test
由于机械臂包为大长径比结构,沿短边的面内横向摆动(z 向)会与面外转动耦合,在小角度振幅下,这种转动近似为软包在振动台上下运动(即x 向)分量,所以对于降低x 向响应的改善措施在z 向试验中同样受益。对于y 向,由于该方向为机械臂的轴向方向,大长径比的软包结构导致该方向与x 向试验严格正交,并且机械臂包的首尾均有金属三角撑对软包的位移进行限位,所以y 向的响应量级在软包优化前后两轮试验中是相当的。
进一步,表5的随机振动响应与表6的冲击试验响应均表明,软包内的泡沫对于高频振动有较好的过滤能力,机械臂软包能够实现对机械臂、机械手的有效保护。综上,减振软包的设计及使用要点在于包内赋形模块必须与被保护设备紧密贴合,防止设备在包内自由运动;其次,在软包本体能被可靠绑扎束缚的前提下,应尽可能控制软包泡沫结构的预压缩率不大于50%,以便更大程度地利用软包整体的阻尼吸能特性。

表6 机械臂包冲击试验最大加速度响应Table6 The maximum acceleration response in shock test of the mechanical arm package
试验后使用API激光跟踪仪,对机械臂进行末端重复定位精度测试,如图11所示。在机械臂的工作空间内任意选取4个间隔较大的位置点,控制机械臂从任意起始位置运动并依次经过设定的目标点,每个目标点重复测量次数n=20,同时利用SMR 靶镜分别记录靶标上3点的位置,计算出靶标的实际空间位姿(x, y, z,φ,φ,φ)。
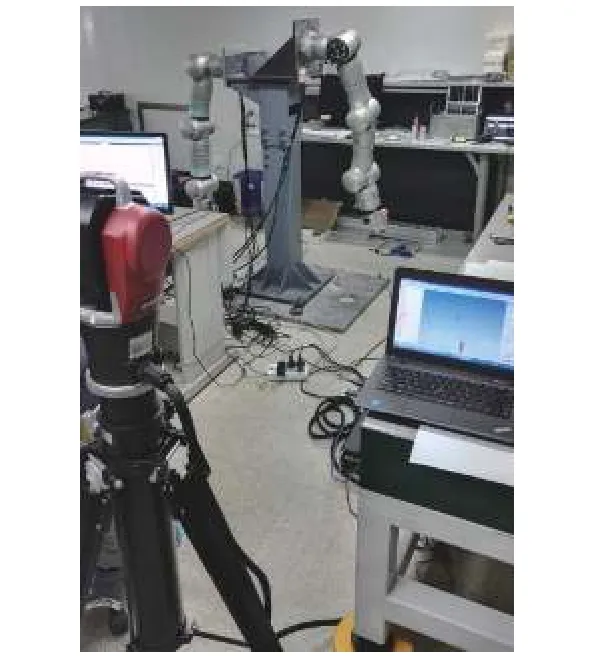
图11 力学试验后机械臂末端重复定位精度测试Fig.11 Repetitive positioning accuracy test for manipulator terminal after mechanical test
测试得到4个目标点的位置重复精度和姿态重复精度,如表7所示。机械臂的末端重复定位精度为:σ=max{σ,σ,σ,σ}=0.387 mm,σ=max{σ,σ,σ,σ}=0.074°。可以看出,机械臂末端重复定位精度满足位置±1 mm、姿态±0.5°的位姿精度要求。机械臂绝对定位精度将优于位置±2 mm、姿态±1°,满足在轨操作任务要求。由此可最终判定,在软包的保护下,机械臂可顺利通过发射段的力学过载。

表7 力学试验后机械臂末端重复定位精度测试结果Table 7 Repetitive positioning accuracy of the manipulator terminal after mechanical test
4 “天宫二号”机械臂系统应用情况
机械臂、机械手正样产品以发射上行状态参加了“天宫二号”整器力学试验。试验中机械手测点最大响应为x 向4.4g(27 Hz)、y 向1.7g(6.4 Hz)、z 向1.5g(6.3 Hz),量级被单机验收级试验所覆盖,频响区间与单机振动试验相比稍有差异,这与整器动力学特性以及相应仪器板刚度特性相关。试验后机械臂、机械手测试状态正常,表明优化后的机械臂软包对于执行飞行任务具备较高的可靠度。
2016年9月15日,“天宫二号”机械臂系统以软包装载形式发射入轨。从2016年10月22日到2016年11月13日,“神舟十一号”航天员乘组将机械臂从软包中取出,并在轨与机械臂系统配合完成了9次加电工作。飞行任务期间,机械臂、机械手状态良好,视觉/位置/力传感器测量精度正常,操作精度高,完成了非接触类的测试性试验以及接触类的维修性试验,成功实现了我国人机协同在轨维修技术的首次在轨验证,为后续空间机器人辅助或配合航天员开展在轨维修任务积累了经验和数据,可为后续空间站设备布局及发射上行方案提供良好的技术支撑。
5 结论
针对以“天宫二号”机械臂为代表的仿人型机械臂系统,本文设计一种减振软包上行方案,并对这种装载模式的有效性进行了力学试验验证,通过两轮试验确定了软包技术状态;机械臂系统在轨试验获得成功。研究表明:
1)发泡聚乙烯作为载人航天器减振软包的主结构材料,可有效降低精密机电类设备上行所承受的发射载荷;
2)软包内赋形模块与装包设备的大质量部件以及力学敏感部件必须紧密贴合,避免设备在包内自由运动,以降低振动加速度幅值;
3)束缚带对软包的约束并非越紧越好。在软包本体被可靠绑扎束缚的前提下,软包泡沫结构的预压缩率应≤50%,以确保充分发挥软包对载荷的吸能作用。
