基于RSSI测距的监狱人员定位算法改进
2021-03-13王正宏
摘 要:传统的基于RSSI的测距定位算法易受其他节点的干扰,传播过程中信号强度会受障碍物、遮挡物等因素影响导致信号随着距离增加而减弱,从而发生多径效应,定位精度低。针对这些问题,文章提出使用均值聚类算法K-Means方法动态获取信号传输路径衰减指数的加权平均值,并基于数学导数求极值思想进行误差分析,进一步减小误差,提高定位精确度。仿真结果表明,与传统的RSSI测距定位方法相比,优化算法的定位精度进一步提高,有效满足监狱人员定位的需求。
关键词:RSSI定位;多径效应;均值聚类算法;路径衰减指数;导数极值
中图分类号:TN929.5 文献标识码:A文章编号:2096-4706(2021)15-0036-04
Abstract: The traditional ranging and positioning algorithm based on RSSI is easy to be disturbed by other nodes. In the process of propagation, the signal strength will be affected by obstacles, obstructions and other factors, resulting in the weakening of the signal with the increase of distance, and then resulting in multipath effect and low positioning accuracy. To solve these problems, this paper proposes to use the mean clustering algorithm K-Means method to dynamically obtain the weighted average value of the attenuation index of the signal transmission path, and analyze the error through the idea of seeking the extremum by the mathematical derivative, so as to further reduce the error and improve the positioning accuracy. The simulation results show that compared with the traditional RSSI ranging and positioning method, the positioning accuracy of the optimized algorithm is further improved and can effectively meet the needs of prison person positioning.
Keywords: RSSI positioning; multipath effect; mean clustering algorithm; path attenuation index; derivative extremum
0 引 言
由于监狱的特殊社会功能,对人员位置定位的要求越来越高,对监狱犯人使用定位功能一方面可以提高监狱民警的工作效率,防止犯人脱逃;另一方面一旦发生犯人脱逃事件,可以根据位置信息进行快速抓捕。因此,高精度的人员定位算法,对监狱机关防脱逃事件以及脱逃抓捕工作有着重大的现实意义和社会价值。
现阶段,人员定位的算法研究大多集中在矿井应用中。对于无线定位算法的研究有很多种,根据定位机制的不同,定位算法主要分为基于测距(Range-based)和无需测距(Range-free)两大类。无需测距的定位算法有指紋数据库算法、质心算法、Dv-hop算法和蚁群算法等。这些算法主要思想是估计待测节点位置,系统误差较大。基于测距的算法有TOA算法、AOA算法、TDOA和RSSI等。由于TOA(基于时间)和TDOA(基于时间差)算法要求设备时钟同步,对硬件要求较高;AOA(基于角度)算法的计算复杂性较高;而基于测距的RSSI算法由于硬件设备简单、计算简单等优点而在众多领域被深入研究和广泛应用。其中韩东升[1]等提出了煤矿井下基于RSSI的加权质心定位算法,该算法考虑了各基站对信标节点距离不同的权重;景哲[2]提出了一种改进的RSSI井下定位算法,该算法将非测距的DV-hop的跳数信息引进RSSI算法中,利用节点间跳数与跳距信息提高测距精确度;刘亚秋[3]等提出基于RSSI测距的井下人员定位技术研究,该算法通过粒子群算法对测出的各个节点取最优值;谢国民[4]等提出了基于PSO-GSA优化的井下加权质心定位算法研究,该算法针对RSSI定位获得的位置,通过粒子群算法和引力搜索算法优化进一步提高其定位精度;任国兴[5]等提出一种改进的煤矿井下的无线定位算法,使用相邻时间补偿法减少多径效应造成的误差,提高Wi-Fi定位精度;李宁[6]等提出了基于改进遗传算法的矿井人员定位新算法,利用路径衰减指数之间的加权距离进行周期性获取;莫树培[7]等提出了基于聚类和K近邻算法的井下人员定位法,利用聚类K-means思想改善了指纹膜定位算法;詹华伟[8]等提出了基于RSSI的四边测距井下定位系统,优化了传统的RSSI三边测距三圆不相交于一点的问题;徐善永[9]等提出了基于人工鱼群算法的煤矿井下人员定位技术研究,通过人工鱼群算法对RSSI测距获得的初始鱼群选择最优群。
本文在上述研究的基础上进一步优化与改善,提出了基于RSSI测距的监狱人员定位算法。对RSSI测距获得的信号路径衰减指数建立初始群,通过二分均值聚类K-means算法对信号强度值进行分类,得到了不同环境影响下的不同路径信号强度值,并在此基础上引进三维坐标系,提高监狱人员定位的适用性,最后通过加权质心定位算法求出待测目标位置(也可通过累计误差求导),以此提高算法定位精确度。实验结果表明,该优化的定位算法较传统RSSI定位算法定位精度更高,横向误差仅0.58米。
1 RSSI人员定位系统架构
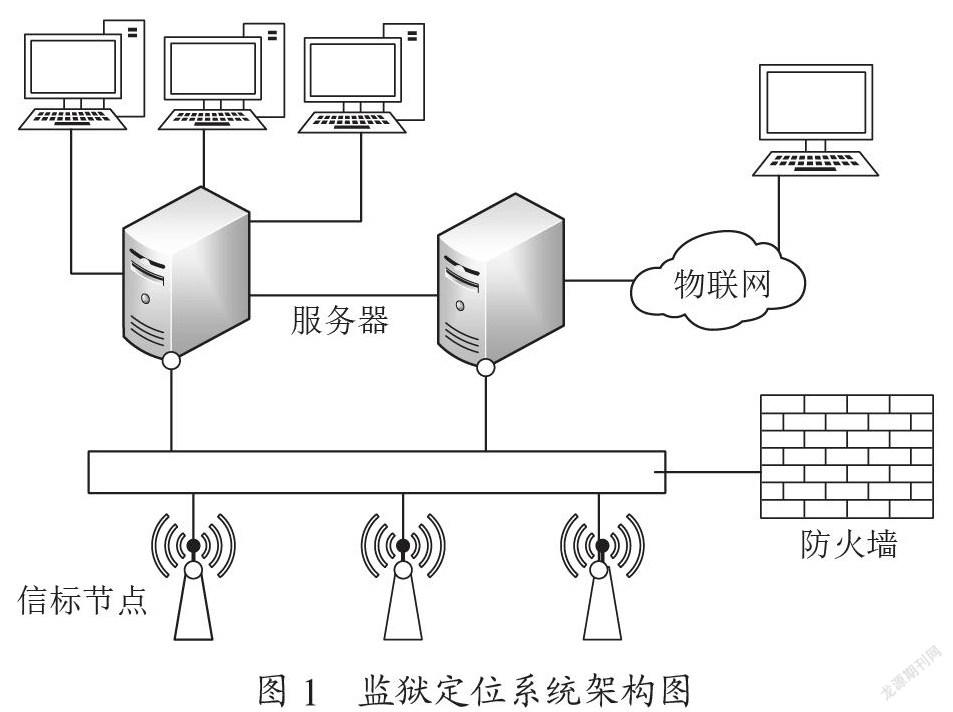
监狱空间环境较为复杂,主要由工厂、宿舍楼、操场、食堂和仓库等区域组成。根据各区域的不同特点,对室外主要采用GPS定位系统实现人员定位,而对存在大量障碍物的室内则采取RSSI定位。RSSI人员定位系统主要由监控中心、服务器、信标节点(锚节点)、基站、目标节点(标识卡)、交换机和服务器等设备组成[10]。系统架构图如图1所示。
基站(信标节点)安装在监狱场所的重点位置,要求基站的信号尽量全覆盖,它的位置是固定已知的。标识卡(目标节点)是给服刑人员佩戴的无线移动标签,目的是与基站进行信息通信,获取基站的信息,完成自身的定位。以太网和服务器用于与监控电脑进行数据传递和转换。
RSSI测距原理过程:当定位标签在信标节点信号覆盖范围内时,信标节点与服刑人员佩戴的标签进行通信,定位标签会接收到信标节点的信号,由于信号在传输过程中会随着距离增加而衰减,所以接收到的信号强弱程度能够反映出两点之间的距离。
2 传统RSSI测距定位过程
设PL(d)为距离发射节点d处的接收信号功率,PL(d0)为在参考距离d0(一般取d0=1 m)时的接收信号功率,根据无线电信号的收发功率可以得到信号的路径损耗经典模型[11]:
其中n为信号衰减因子,一般的取值范围为(2~5)。βα均值为零且服从标准差为α(取值4~10)的高斯分布随机噪声值。在实际应用中,通常采用较为简化的数学模型:
转化为信号强度表达与距离之间的关系为:
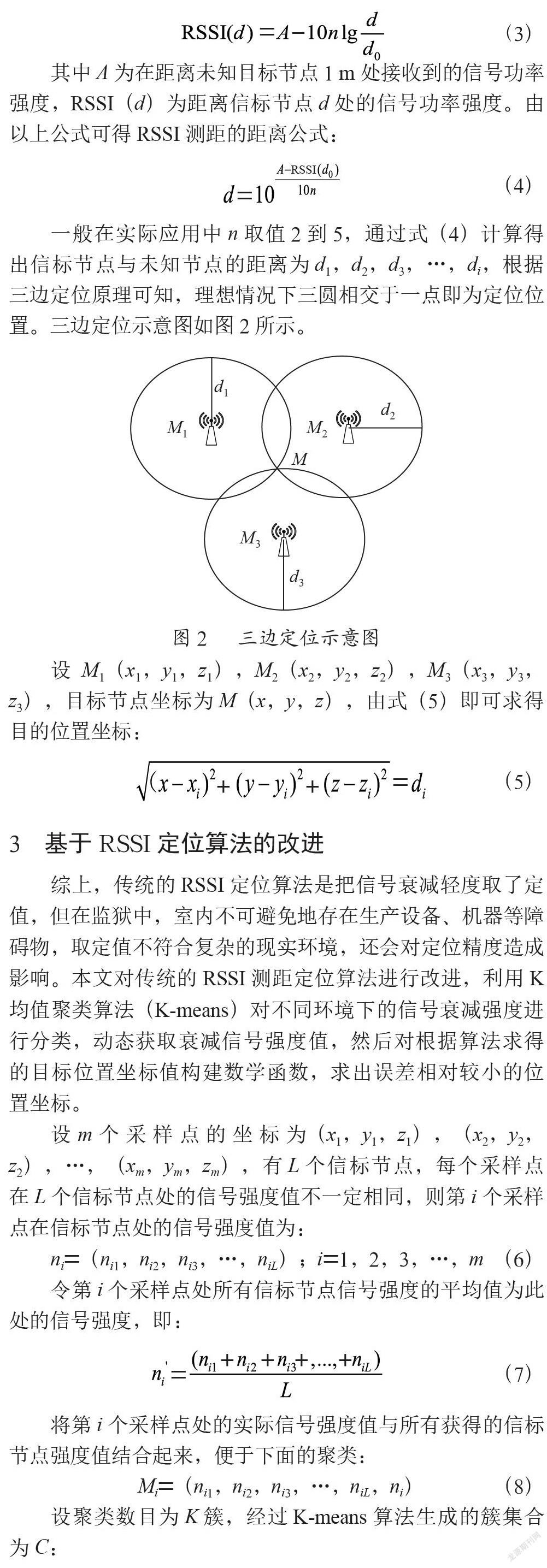
其中A为在距离未知目标节点1 m处接收到的信号功率强度,RSSI(d)为距离信标节点d处的信号功率强度。由以上公式可得RSSI 测距的距离公式:
一般在实际应用中n取值2到5,通过式(4)计算得出信标节点与未知节点的距离为d1,d2,d3,…,di,根据三边定位原理可知,理想情况下三圆相交于一点即为定位位置。三边定位示意图如图2所示。
3 基于RSSI定位算法的改进
综上,传统的RSSI定位算法是把信号衰减轻度取了定值,但在监狱中,室内不可避免地存在生产设备、机器等障碍物,取定值不符合复杂的现实环境,还会对定位精度造成影响。本文对传统的RSSI测距定位算法进行改进,利用K均值聚类算法(K-means)对不同环境下的信号衰减强度进行分类,动态获取衰减信号强度值,然后对根据算法求得的目标位置坐标值构建数学函数,求出误差相对较小的位置坐标。
设m个采样点的坐标为(x1,y1,z1),(x2,y2,z2),…,(xm,ym,zm),有L个信标节点,每个采样点在L个信标节点处的信号强度值不一定相同,则第i个采样点在信标节点处的信号强度值为:
令第i个采样点处所有信标节点信号强度的平均值为此处的信号强度,即:
将第i个采样点处的实际信号强度值与所有获得的信标节点强度值结合起来,便于下面的聚类:
设聚类数目为K簇,经过K-means算法生成的簇集合为C:
则每个簇的中心点为:
K-means聚类算法的目标函数为:
聚类算法的最终结果为获得不同环境下的信号衰减强度值,聚类结束的条件为K值大小或者簇的中心点不再发生变化,则聚类过程[12]结束。
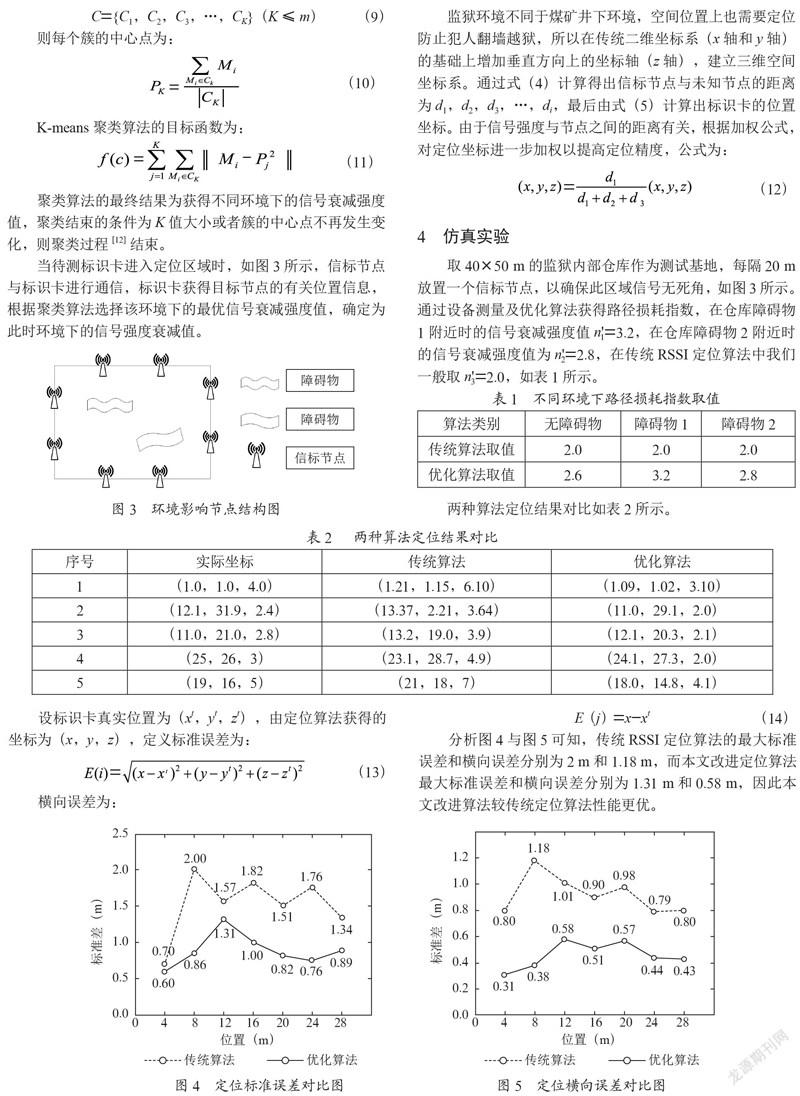
当待测标识卡进入定位区域时,如图3所示,信标节点与标识卡进行通信,标识卡获得目标节点的有关位置信息,根据聚类算法选择该环境下的最优信号衰减强度值,确定为此时环境下的信号强度衰减值。
监狱环境不同于煤矿井下环境,空间位置上也需要定位防止犯人翻墙越狱,所以在传统二维坐标系(x轴和y轴)的基础上增加垂直方向上的坐标轴(z轴),建立三维空间坐标系。通过式(4)计算得出信标节点与未知节点的距离为d1,d2,d3,…,di,最后由式(5)计算出标识卡的位置坐标。由于信号强度与节点之间的距离有关,根据加权公式,对定位坐标进一步加权以提高定位精度,公式为:
4 仿真实验
取40×50 m的监狱内部仓库作为测试基地,每隔20 m 放置一个信标节点,以确保此区域信号无死角,如图3所示。通过设备测量及优化算法获得路径损耗指数,在仓库障碍物1附近时的信号衰减强度值n'1=3.2,在仓库障碍物2附近时的信号衰减强度值为n'2=2.8,在传统RSSI定位算法中我们一般取n'3=2.0,如表1所示。
两种算法定位结果对比如表2所示。
设标识卡真实位置为(xt,yt,zt),由定位算法获得的坐标为(x,y,z),定义标准误差为:
横向误差为:
分析图4与圖5可知,传统RSSI定位算法的最大标准误差和横向误差分别为2 m和1.18 m,而本文改进定位算法最大标准误差和横向误差分别为1.31 m和0.58 m,因此本文改进算法较传统定位算法性能更优。
5 结 论
本文在对传统测距定位算法易受多径效应影响而引起定位误差的基础上,提出了使用K均值聚类算法对信号传输路径衰减指数进行分类,进而动态获取传输路径衰减指数;考虑到监狱内服刑人员可能会有翻扒围墙的可能性,本文算法又引进三维坐标系,从而在空间上对监狱人员定位,最后通过距离加权法求出最后定位位置。相较于传统RSSI测距定位算法,本文算法性能提高,对于将来应用到监狱系统中提供了理论支撑。
参考文献:
[1] 韩东升,杨维,刘洋,等.煤矿井下基于RSSI的加权质心定位算法 [J].煤炭学报,2013,38(3):522-528.
[2] 景哲.一种改进的RSSI井下定位算法 [J].测试技术学报,2013,27(5):440-443.
[3] 耿立松.基于电磁波测距的井下人员定位技术研究 [D].北京:北京工业大学,2012.
[4] 谢国民,刘叶,付华,等.基于PSO-GSA优化的井下加权质心人员定位算法 [J].计算机应用研究,2017,34(3):710-713.
[5] 任国兴,孙中廷,徐永刚.一种改进的煤矿井下的无线定位算法 [J].中国矿业,2015,24(S2):237-240+262.
[6] 李宁,王李管,贾明涛,等.基于改进遗传算法的矿井人员定位新算法 [J].中南大学学报(自然科学版),2016,47(3):929-935.
[7] 莫树培,唐琎,汪郁,等.基于聚类和K近邻算法的井下人员定位算法 [J].工矿自动化,2019,45(4):43-48+76.
[8] 詹华伟,王良源,陈思,等.基于RSSI的四边测距井下人员定位系统 [J].河南师范大学学报(自然科学版),2021,49(4):53-59.
[9] 徐善永,黄友锐,曲立国.基于人工鱼群算法煤矿井下人员定位技术研究 [J].煤炭工程,2013,45(11):129-131+134.
[10] CHENG L,WU C D,ZHANG Y Z,et al. A Survey of Localization in Wireless Sensor Network [J/OL].International Journal of Distributed Sensor Networks,2012,2012,8(12):1-12.[2021-05-11].https://journals.sagepub.com/doi/10.1155/2013/457874.
[11] GUI Y,TAO Z G,WANG C J,et al. Study on remote monitoring system for landslide hazard based on wireless sensor network and its application [J].Journal of Coal Science and Engineering(China),2011,17(4):464-468.
[12] 張利民,张书钦,李志,等.无线传感器网络理论及应用 [M].北京:清华大学出版社,2018.
作者简介:王正宏(1995—),男,汉族,安徽太和人,硕士研究生在读,主要研究方向:物联网。
3448500338264
