船舶智能航行安全风险及其演化研究
2021-03-12洛佳男张宝晨耿雄飞李亚斌马恒哲
洛佳男, 张宝晨, 耿雄飞, 李亚斌, 马恒哲
(1.交通运输部水运科学研究所, 北京 100088; 2.佛罗里达大学, 盖恩斯维尔 32601)
航行安全是推动船舶智能航行技术发展的重要前提。相比常规航行,船舶智能航行综合应用了人工智能、视觉与感知计算、边缘计算、大数据、遥控与运动控制、融合通信、定位与导航系统、时空地理信息等多种先进技术,理论上可有效减少由人的因素导致的水上交通事故。但从技术背景和航运发展历程来看,船舶智能航行技术尚处于初级阶段,仍需要通过大量的试验对所应用的理论和技术进行迭代优化,且确立适用“有人船”和“无人船”共存[1]的法律法规、国际航行准则与标准也需要经历漫长的过渡期。
科学认知船舶智能航行的安全风险,制定详细的风险管控策略,是当前政府、学界和产业界需要明确的基本问题,关乎智能船舶的商用化进程。国际海事组织(International Maritime Organization,IMO)在2017年第98次海安会上设立了海上水面自主船舶(Maritime Autonomous Surface Ships,MASS)议题,相继开展了MASS的概念、分级以及立法范围界定等问题研究,并在2019发布了首个IMO关于MASS的正式文件——《MASS临时测试导则》[2-3]。IMO相关工作为世界范围内的自主船舶技术研发、分级、测试和风险防范提供了方向。基于此,文献[4]~[10]从政府治理角度,重点分析了无人自主船舶对于船舶产业、海上环境、海事监管等方面带来的挑战和风险,并提出了治理层面的风险评估方法和防控策略。学界主要关注自主船舶的碰撞风险和网络安全风险两个方向,通过专家法[11-12]、深度强化机器学习[13]、模型预测控制算法[14]、进化策略优化算法[15]、场论[16]、因果关系[17-18]、人因可靠性分析[19]、系统论[20-21]等方法开展风险辨识与评估方法研究,并开发了自主航行避碰系统[13,15]、航线规划系统[22]、网络风险对抗系统[22]等。同时,也在探索过程中提出了基于《国际海上避碰规则公约》(Convention on the International Regulations for Preventing Callsions at sea, COLREG)可能会导致自主船舶避碰失败[23-24]、自主船舶的最低安全性要求——“至少不低于人类驾驶[25]”、人工智能伦理[26]——“危急情况下的避碰抉择”等问题。
综上所述,当前关于船舶智能航行的安全风险研究主要以自主船舶为研究对象,未能从船岸协同角度建立支撑船舶智能航行系统构建的风险辨识框架,也尚未开展从有人、少人到无人、从人工驾驶、辅助驾驶、遥控驾驶到自主驾驶、从开阔水域到复杂水域的风险演化规律方面的研究。
对此,本文从船岸协同的角度,结合“智飞号”船舶智能航行测试的情况,系统研究船舶智能航行风险的一般演化规律及其特征,建立基于多要素、空间、场景、模式相互关系的风险演化概念模型及其数学表达模型,为船舶智能航行风险认知和管控、政府治理以及基于船岸协同的船舶智能航行与控制系统的构建提供参考。
1 风险演化概念模型
构建船舶智能航行风险演化概念模型可以直观地构筑起对整个系统的风险认知框架,分析风险本质,厘清边界,辨识核心要素,并建立他们之间的联系,从而揭示风险演化的一般规律和特征。本文根据船岸协同关系相关研究结论[27],从风险认知角度构建了由五要素、四模式、三空间、三场景、三过程构成的船舶智能航行风险演化概念模型,并将机器取代人的能力作为研究风险演化的基础,如图1所示。
1.1 “人、机、管、环、信”五因素
人为因素、船机因素、管理因素、环境因素(以下简称“人、机、管、环”)是辨识安全风险源的四类基本因素,主要通过细化四因素的二级风险指标,按照一定原则赋予权重,并通过数学公式计算得出风险概率,从而为风险管控提供量化依据。
本研究根据监管部门、船企、科研部门的32名代表的综合意见,结合船舶智能航行三种驾驶模式的特点,提出将“信息技术和船舶智能航行技术”列为第五类因素(以下简称“信技”),形成“人、机、管、环、信”五因素。通过进一步细化每一类因素的属性和指标,并约定使用“因素”表征风险识别、评估和管控的风险源,使用“要素”表示构成船舶智能航行系统的主要组件,如表1所示。
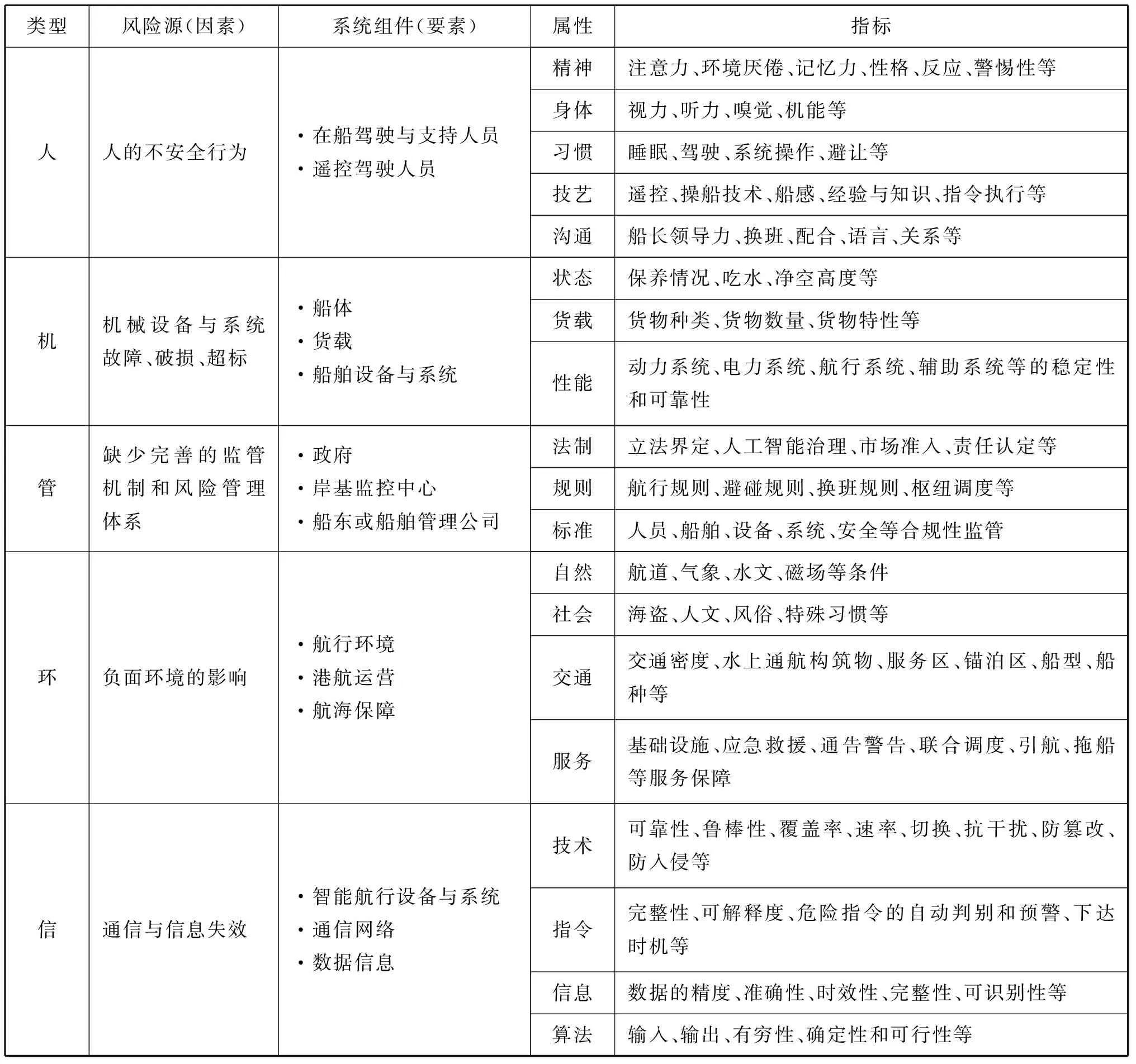
表1 “人、机、管、环、信”五要素释义表
1.2 “人工、辅助、遥控、自主”四驾驶模式
人工驾驶模式是传统驾驶模式。辅助驾驶、遥控驾驶和自主驾驶是船舶智能航行的三种驾驶模式。辅助驾驶是目前技术已可以实现的,部分操作实现自动化,是可以为船舶驾驶人员提供决策支持的驾驶模式。遥控驾驶通过船岸双方的指令交互,实现船舶远程操作和控制。自主驾驶则是完全由机器系统做出自主决策的驾驶模式。三种模式可以在同一航次基于不同场景进行切换。
1.3 “物理、规则、赛博”三空间
物理空间、规则空间和赛博空间是对“人、机、管、环、信”五要素的进一步抽象。物理空间用于表征现实世界的具体事物。规则空间是人在物理空间的基础上建立的行为约束。赛博空间则是船舶智能航行的新问题,对船岸协同理念、遥控驾驶、自主驾驶技术的实现具有重要影响。赛博空间的治理也将成为船舶智能航行的主要保障手段[28]。
1.4 “内河、沿海、远洋”三场景
内河、沿海、远洋是船舶航行的三大场景。三个场景对于五要素、四模式和三空间的要求均不相同,在航道条件、水上通航构筑物、通信条件以及人员要求等具有显著差异[29-30],因此将三场景作为风险演化分析的边界条件。
1.5 “港外航行、进出港、靠离泊”三过程
复杂交通场景下的驾驶安全与效率是反映智能航行系统技术水平的重要指标。《智能船舶规范(2020)》将智能航行分为基本功能和进阶功能两类,其中基本功能是指航路与航速设计和优化,进阶功能包括开阔水域自主航行和全航程自主航行[31]。全航程自主航行可进一步区分为狭窄水道、复杂环境和自动靠离泊三种场景,这是分别从自然条件、交通条件以及船舶技术三个方面提出要求。本文在此基础上进一步将场景细化为船舶航行的离泊、出港、港外航行、进港、靠泊五个阶段,用于突出外部条件的变化。
2 风险演化数学表达模型
为准确描述船舶智能航行风险演化的规律和特征,需要将概念模型转化为可进行判断、计算和趋势预测的数学表达模型。
2.1 定义
定义1:智能航行系统是由“人、机、管、环、信”五要素构成的复杂系统,使用I表示,则有
I=Fp+Fs+Fe+Fm+Fi
(1)
式(1)中,Fp为人为要素,Fs为船机要素,Fe为环境要素,Fm为管理要素,Fi为信技要素。
定义2:智能航行安全风险指系统可能发生和引起不良后果的危险,使用RI表示,进一步地设w为权重参数,则有
RI=(F,w) {Fp,Fs,Fm,Fe,Fi}=F
(2)
定义3:事故用AC表示;造成事故的风险因素(指标)定义为ri,则有
AC=f(ri)·T·Sri⊆RI
(3)
式(3)中,T与S分别指事故发生所在的时间域和空间域,ri为RI的子集。
定义4:假设智能航行在内河、沿海、远洋场景已明确其要素属性、风险指标以及事故类型,则可设内河水域为边界条件BI、沿海水域为边界条件BC、远洋水域为边界条件BO。
2.2 无人化趋向的风险演化表达
用人工驾驶(MM)、辅助驾驶(MS)到遥控驾驶(MR)再到自主驾驶(MA)来表征从有人到少人再到无人的三种渐变模式,则有
(4)
式(4)中,δM表示不同模式下的风险集合的变化状态,这种变化可以进一步地使用三种模式下F要素的权重w变化分布及趋势来表示,即Fdw,从而得出特定边界条件下的风险演化关系SH1。
在尚未具备大量智能航行事故案例的情况下,可以基于专家法进行匿名反馈,对五要素及其风险指标的权重进行打分。图2和表2为根据前述专家样本库结论进行数据归一化处理的权重分布情况,反映了样本库认知范围内的系统各要素的重要程度。

图2 各要素在不同驾驶模式下的权重分布
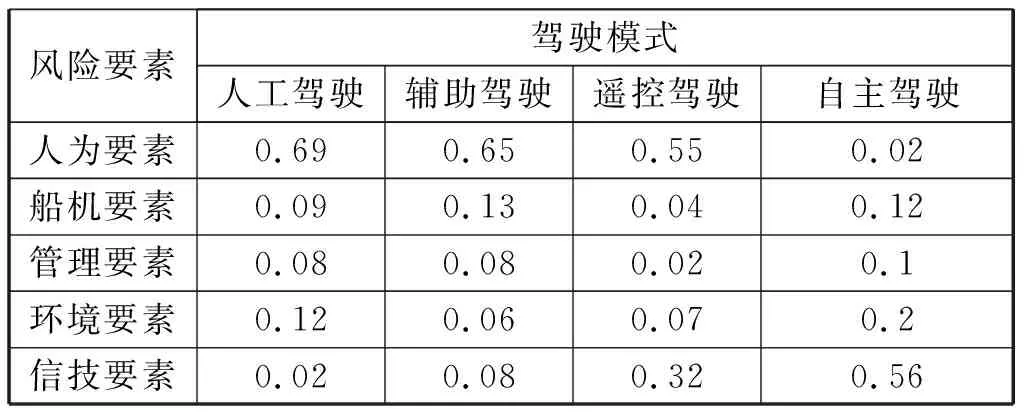
表2 各要素在不同驾驶模式下的权重归一化数值
2.2 风险事故的连锁效应表达
由式(2)和(3)可知,事故是关于ri在T域和S域的函数,ri是RI的子集,得出风险事故是在特定空间和时间下由特定事件触发的风险演化结果,具有随机性和不确定性。
事故的可预测性可以直接用于后果损失评价,是机器在面向复杂事件时进行合理抉择的一个关键问题。通过限定智能航行系统驾驶模式MA,则风险事故的连锁效应(SH2)可以表示为
(5)
式(5)中,AC1为发生的事故,CSc为机器决策算法,AC2为可能导致的连锁事故。
根据式(5)得出CSc是风险事故连锁效应的触发事件,同时后续风险仅与Fs、Fi、Fe相关,用伪代码表示如下

算法 机器决策 if AC1 happened: //事故发生 {PRI}={Fs, Fi, Fe}·T //后续风险集发生概率 for p in PRI: sort(p) //概率与后果排序 action() //执行
2.3 安全与效率的平衡演化表达
根据船舶泊位到泊位间的航行过程,进一步将三场景细化为离泊(P1)、出港(P2)、航行(P3)、进港(P4)、靠泊(P5)五个阶段,使用SH3表示不同阶段的风险演化关系,则有:
(6)
式(6)中,δFe表示不同航行阶段环境的变化量,dsafety和defficiency分别代表安全量和效率量,其比值代表安全与效率的导数。
船舶从开阔水域到复杂交通水域风险发生概率呈显著的线性关系[21]。在假设其他条件稳定的条件下,智能航行系统风险演化主要表现为环境变化下人和机器驾驶水平的适应能力,即求解顾及效率最佳化的安全性极限。
3 风险演化规律与特征分析
3.1 无人化趋向下的风险演化
从人工驾驶、辅助驾驶、遥控驾驶再到自主驾驶,本质上是技术水平的不断提高来弥补人为因素主导性不断减弱的过程,即机器取代人的能力。人为因素一直都是导致船舶事故的主因[32]。无人化趋向是否意味着船舶事故发生概率、损失程度的不断减少,是智能航行领域中一个需要长期观察和论证的科学假设。同时,受限于海、陆、空在物理、规则、赛博三个空间中的显著差异,这一问题也几乎难以从汽车自主驾驶系统和飞机自动驾驶系统的演进中得到答案。
对无人化趋向风险演化的主要特征分析如下,具体表现为:
1) 人工驾驶、辅助驾驶模式下,人为因素仍是主要风险源,辅助驾驶模式下信技因素首次纳入风险识别域,权重分布会略有调整。
2) 遥控驾驶模式下,人通过遥控驾驶系统对船体运动的精确控制以及通信保障是这一阶段的主要风险特征。为此,遥控驾驶必然经历从少人到无人在船的过渡期,有人在船的遥控驾驶将是常态。同时,人为因素进一步延伸到船岸两类人员,且对于岸基人员的操船技能要求全面高于传统船舶驾驶人员。
3) 自主驾驶模式下,人为因素几乎消失,驾驶层面转而对智能航行系统技术等级和技术水平的全面依赖,船岸协同下的政府、港口以及船舶间的关系影响作用显著增强,有人在船的自主驾驶亦可能成为常态。
3.2 风险事故的连锁效应
船舶智能航行事故在时空域的发生和传播具有海因里希因果连锁效应[33],可以使用基于航道网络模型方法,利用元胞自动机[34]准确表述不同时刻下的交通状态,其一般规律和特征具体表现为:
1) 航行安全事故是由细粒度的风险指标相互作用引起的系统性故障,从统计角度表现为单一风险因素为主导、多风险因素共同参与的因果关系。
2) 单一风险可以进一步传播,其作为因变量引起多重风险的并发连锁。
3) 机器学习下的自主驾驶伦理问题会引发风险传播的不确定性,即以何种尺度来衡量自身、他船或他物的重要性。
4) 航行安全事故不是单一事件。
3.3 安全与效率的平衡演化
单一场景的划分可以作为风险演化规律研究的一种限定条件,通过不同场景组合不断迭代系统决策能力。“智飞”号在交叉会遇局面下,采取了最安全的避碰策略(见图3),即在交叉会遇船已过本轮正横后,仍采取绕会遇船船尾的航线,在不考虑其他船舶条件下,碰撞风险为0,但油耗呈正比上升。结合前述关于风险演化表达模型的相关结论,得出复杂场景下的安全与效率演化特征:
1) 安全性的提升在一定程度上会削弱航行效率。
2) 安全与效率的最佳平衡点可以用于表征船舶智能航行系统技术水平的最高要求。
3) 同等条件下,安全性在离泊、出港、港外航行、进港和靠泊五个过程呈正态曲线分布,效率则呈反向正态曲线分布,即显著的反比关系。

图3 “智飞”号交叉会遇局面下的避碰决策示意图
4 结 论
认知安全风险是构建基于船岸协同的船舶智能航行系统的前提条件。通过理论和实际测试分析,本文将信息技术因素列为“人、机、管、环”外的第五类因素,并得出如下结论:①在无人化趋向下,受信技因素作用影响,人为因素比重逐渐下降,但人对航行安全所发挥的作用并未下降,在遥控模式下甚至不低于人工驾驶和辅助驾驶;②信息技术因素是船舶智能航行系统中安全治理的重要方向,其不仅涉及通信与网络本身,而且船舶感知认知水平相比岸与岸、岸与船、船与船之间的信息精确性、及时性与可靠性更为重要;③风险传播具有连锁效应,避免风险传播引发连锁反应导致事故损失需要从立法、技术、标准等多个层面共同约定;④安全与效率的平衡演化是表征船舶智能航行系统技术水平的标志,也是下一阶段的主要研究方向。