基于MATLAB的六足机器人运动学分析仿真
2021-03-12刘园园
刘园园
(长安大学工程机械学院,陕西 西安 710064)
0 前言
随着科技的发展,机器人已逐渐成为学者研究的热点,而六足机器人作为典型的并联结构机器人,运动方式多变,适合复杂的地面环境,以其优越的越障能力在诸多机器人中脱颖而出,已成为近年来的研究热点。本文对六足机器人的运动学进行了研究计算,并在Simulink中进行了仿真分析[1]。
1 正运动学求解
文献[2]详细介绍了旋量理论,本文通过旋量理论搭建如图1所示的单腿模型,并作为初始位置,其关节轴线上点rn(n=1,2,3)坐标相对于基坐标系位置关系如图1所示,其中L1=45mm,L2=75mm,L3=135mm。
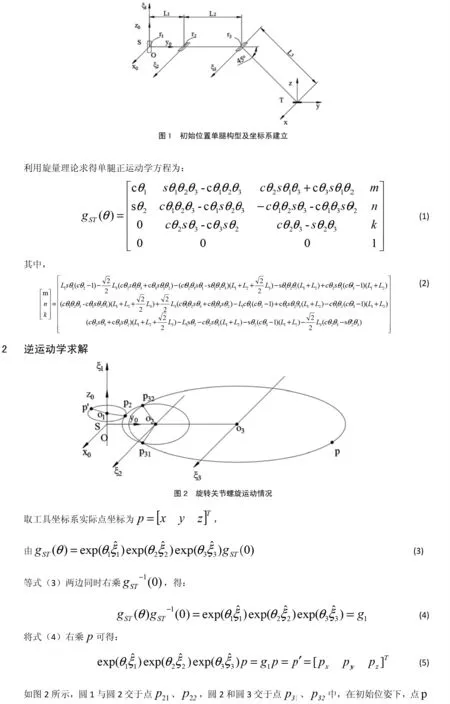
图1 初始位置单腿构型及坐标系建立
利用旋量理论求得单腿正运动学方程为:
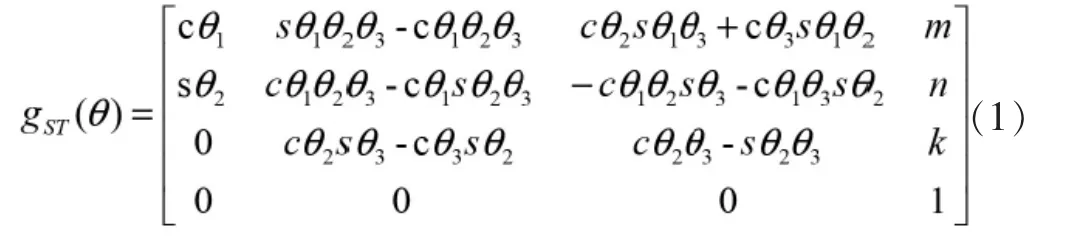
其中,

2 逆运动学求解
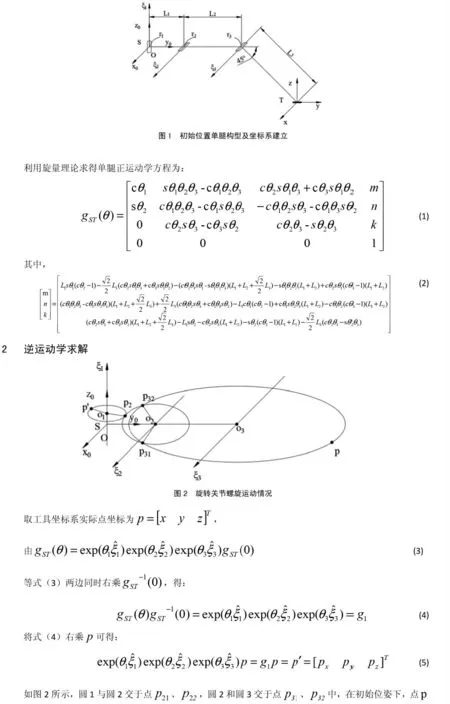
图2 旋转关节螺旋运动情况

将式(4)右乘可得:

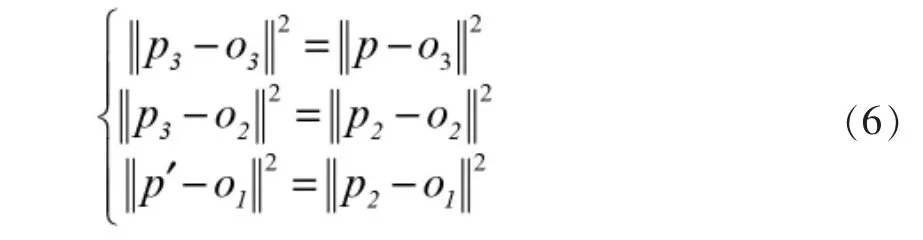
如图2所示,圆1与圆2交于点p21、p22,圆2和圆3交于点p31、p32中,在初始位姿下,点p通过轴线ζ3旋转θ3到点p3,之后通过轴线ζ2旋转θ2到达点p2,最后通过轴线ζ1旋转θ1到点p'。因此,需要计算出各个交点坐标,由图2可知:
其中:y2、p2x和p3x是未知参数,y3=L1+L2,y2=L1根据几何关系可建立方程:
至此,交点p2、p3已经求出,所以3个旋转关节螺旋运动可表示为:
分别利用Paden-Kahan子问题1可求得前3个关节角度为:

3 基于MATLAB/Simulink的运动学仿真
如图3所示,将CATIA搭建的六足机器人三维模型导入到Simulink中,然后根据运动学分析结果计算出六足机器人的运动空间,并进行步态规划获得步态信号,并将其添加至仿真中,最后在仿真环境中添加地面信息,其最终的Simulink仿真图如图4所示,由最终的动态仿真结果观察可得六足机器人可以在平坦地面正常运动行走,验证了运动分析的正确性。
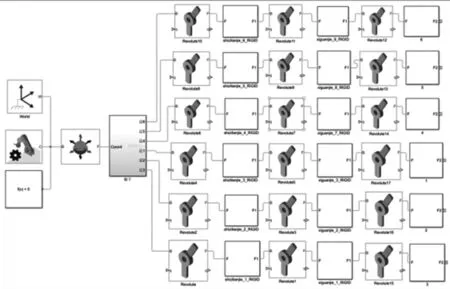
图3 六足机器人本体Simulink仿真图
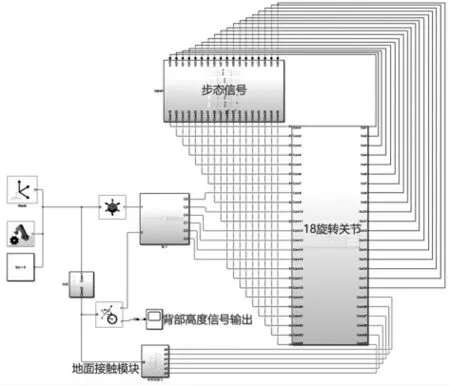
图4 最终仿真环境搭建
4 结论
本文依据旋量理论对六足机器人进行运动学分析,搭建正逆运动学模型,并于MATLAB/Simulink仿真环境中验证了运动分析的正确性,为后续六足机器人运动平稳性的研究奠定了良好的基础[3-4]。
