船舶操纵仿真的狭长通航隧洞航行安全研究
2021-03-11廖芳达关宏旭严庆新
邓 健, 廖芳达, 谢 澄, 关宏旭, 严庆新
(武汉理工大学 a. 航运学院; b. 国家水运安全工程技术研究中心;c. 内河航运技术湖北省重点实验室, 武汉 430063)
通航隧洞是一类新型的、特殊的船舶通航设施,在世界范围内十分稀少。近来年,随着我国内河(特别是山区河流)航运梯级开发的深入,通航隧洞作为一类新型的通航设施正得到越来越广泛的应用。2018年贵州乌江构皮滩枢纽建成了我国第一个船舶通航隧洞,长约300 m,可通航500吨级船舶;浙江论证通过了富春江二线船闸,其中包括建设富春江七里泷航道通航隧道工程,可通航千吨级船舶;目前,正在建设的三峡新通道也初步论证了通航隧洞建设方案。
从建成和规划的船舶通航隧洞来看,为便于船舶通航,通航隧洞长度一般超过1 km,横断面积通常大于200 m2,而其断面系数小于4,“狭长”是通航隧洞的主要特点。船舶在隧洞中主要采取自航方式通航。狭长通航隧洞由于其通航宽度窄、水深浅、能见度不良和环境封闭等特点,属于典型的受限航道,但船舶在隧洞中航行性能与敞开式限制性航道有别,隧洞中船舶操纵难度更大,船员心理压力更高,因此,船舶安全风险比其他水域明显更高。
国内外对于通航隧洞这一特殊对象的船舶航行安全研究较少。从研究方法来看,目前,对于受限水域内的船舶航行安全问题主要采用船舶操纵模拟器、船舶物理模型试验和实船试验等方法来开展;从结果来看,船舶操纵仿真方法是一类有效的研究手段,可针对于多种工况、多类型船舶条件进行研究,是最为有效手段之一。目前,国内外围绕通航隧洞这一特殊的通航建筑物开展的研究工作较少,但船舶在受限水域内的航行安全研究积累了一定的经验,国内外开展了广泛的研究工作。
1) 船舶操纵仿真是一类有效的研究方法。黄立文等[1]运用航海模拟器对内河水域桥梁/船闸通航方案进行研究;徐元等[2]将航海模拟器应用于码头工程的通航评估过程中,分析其有效性;唐成港等[3]利用船舶操纵模拟器对船舶系泊安全进行研究;刘轶华等[4]利用大型船舶操纵模拟器对洋口港液化天然气(Liquefied Natural Gas, LNG)船舶进行靠离泊风险评估;温鲁等[5]利用船舶操纵模拟器开展关于上海洋山港港区三维视景仿真的研究。
2) 实船试验和模型试验也被常用于对通航水域相关问题研究,常俊宇等[6]基于实船试验对作业耙吸船对长江口深水航道通航影响进行研究;徐双喜等[7]对三峡库区这一特定水域中自航船拖带航行时的操作性、直航稳定性进行了探讨;徐进超等[8]运用物理模型试验方法,对贵港二线船闸下引航道的布置进行了优化研究。
本文将选取典型的狭长通航隧洞——拟建乌江思林二线通航隧洞工程作为对象,采用航海模拟器构建隧洞通航环境视景、代表船型模型,并由具备丰富驾引经验的内河船长开展船舶直航试验、船舶制动冲程操纵试验和小舵角操纵试验等3种试验,分析船舶在通航隧洞内航行操纵的特点与风险,提出适用于狭长隧洞通航船舶航行的驾引方案。为保证研究结果的真实性,本文将使用英国船商公司开发的船舶全任务大型操纵模拟器NT-PRO 6000型模拟器开展研究工作,其获得多个船级社的认证,已被成功应用于多处重大水工建筑物的通航安全研究,是一种对在复杂通航环境条件下的限制性水域船舶航行安全研究的有效方法。[1-3]
1 研究对象概况
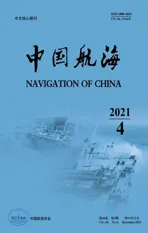
乌江航道是我国规划的高等级航道,贵州省重要的水路大通道,为进一步对乌江航道通过能力提等扩能,贵州省拟开展乌江二线通航设施的建设,其中,思林二线通航建筑物就是其中的重要部分。考虑到环保和水土影响,思林二线通航建筑物建设拟使用船闸+通航隧洞+垂直升船机方案,其中,通航隧洞通航采用双洞单行方案。思林二线通航隧道位于乌江峡谷河段,布置在思林已建通航建筑物左岸280 m处(见图1),轴线长2.2 km,隧洞断面为城门洞型,下部为矩形过水断面,上部为拱形洞顶,规划隧洞高度20.0 m,通航隧洞宽16.0 m,高20.0 m,洞内水深5.5 m,为保证通航隧洞内交通、消防安全,在航道两边分别设置宽2 m、高4 m的人行横通道,隧洞内截面图见图2。
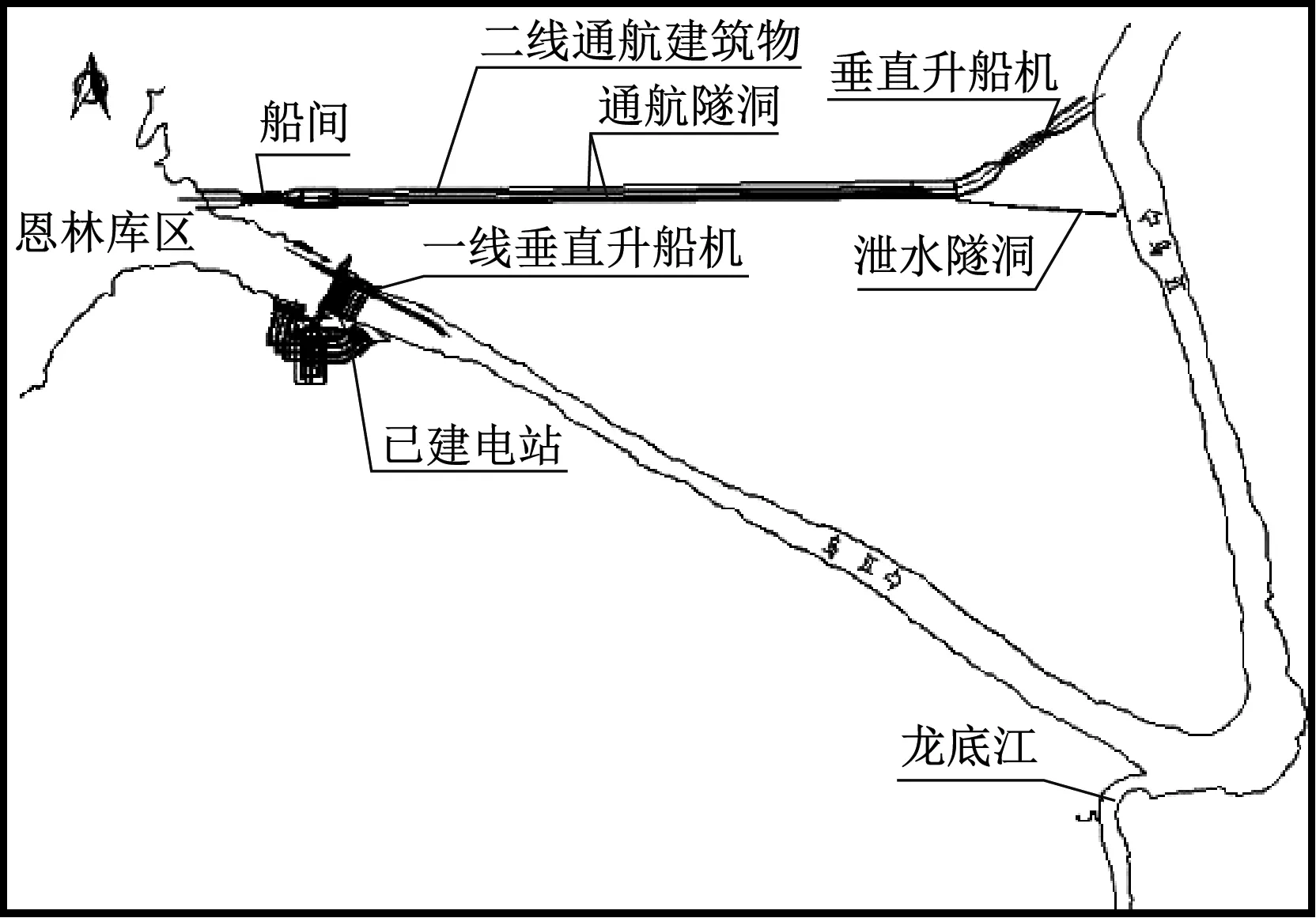
图1 思林二线通航建筑物工程图
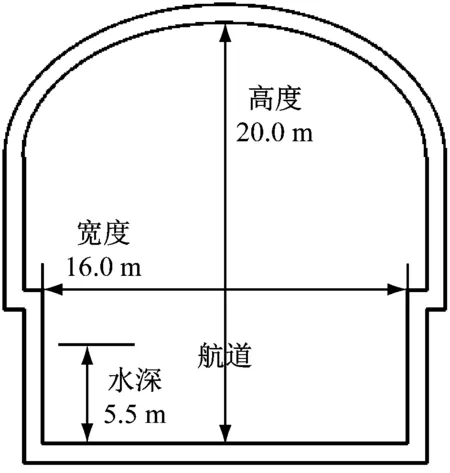
图2 思林二线通航隧洞内截面图
2 通航环境与船舶模型构建
使用船舶全任务大型操纵模拟器NT-PRO 6000型模拟器开展研究工作(见图3),其中最重要的基础工作就是构建符合实际特征的通航环境视景模型的船舶模型,其建模方法可详见文献[2]。

图3 NT-PRO 6000型船舶操纵模拟器
2.1 电子海图显示与信息系统和视景系统的构建
开展船舶通航隧洞的视景建模时,首先要构建模拟水域的电子江图,并在此基础上构建通航隧洞的三维视景。本文依据工程设计CAD图,对隧洞工程水域进行数据录取、数据转换、坐标转换和数据输入等流程,利用Model Wizard建模平台建立了相应的电子江图和相应的航道视景模型,见图4。

图4 隧洞内三维视景模型
2.2 船舶三维模型的建立
根据贵州乌江航运的现状和未来货运市场的分析,乌江航道货运主要以干散货运输为主。因此,本研究主要选取1 000吨级干散货船作为模拟仿真对象,模型尺度船型主要参数见表1,建立相对应的船舶三维模型见图5。
表1 试验船型主要参数 m

图5 1 000吨级散货船三维模型
3 船舶操纵仿真试验方案设计
3.1 通航环境条件设置
由于隧洞通航环境较为封闭,影响船舶航行的主要因素为气象、水流、照明和其他因素等。
1) 气象因素:考虑到隧洞内两侧存在明显的遮挡,因此隧洞中的风一般顺直于航道。据调研该地区夏季主导风向为S风,冬季以NNE风为主,风力以常规风力4级为主,风速为7 m/s。
2) 水流因素:由于隧洞上下游分别建设有船闸和升船机等设施,通常运行时隧洞无水流入和流出,除船型波影响外,一般情况下流速整体很小,因此,试验中设置初始水流条件为静水。
3) 照明因素:由于隧洞内照明主要为驾引人员能看清航道及周围环境,因此,将隧洞入口分为入口0~10 m照度为200 lx、入口10~20 m照度为100 lx和入口20~50 m照度为30 lx等3个入口段,其余为中间段,照度为10 lx。
4) 其他因素:本研究只考虑单艘船舶在隧洞内的航行情况,不考虑多艘船舶在隧洞内航行的相互影响。
3.2 试验方案的设计
本研究模拟船舶在隧洞内的主要航行状态,主要开展以下3类试验:
1) 船舶直航试验:即对于船舶从引航道进入隧洞、在隧洞内航行和船舶驶离隧洞的全过程进行模拟,以了解船舶通过隧洞整个过程的操作情况。
2) 船舶制动冲程操纵试验:为了解船舶在通过隧洞过程中进行紧急制动时的操作情况,开展船舶制动试验,以研究隧洞内紧急制动的距离。
3) 小舵角操纵试验:由于隧洞内航道顺直,因此,船舶操纵基本采用小舵角对船舶进行控制,为考察船舶在小舵角情况下的转向性,开展小舵角操纵试验,此试验控制舵角按照3°进行,当船舶航向变化1°时即进行反向操作,以考察船舶在小舵角情况下的操作。
3.3 试验人员的选取
由于通航隧洞内航道狭窄,对船舶驾引人员的技能水平要求较高,因此,模拟仿真试验驾驶人员为持有内河一等船长证书的专业内河船舶驾驶人员。
4 试验结果分析
4.1 船舶隧洞内航行试验结果分析
由试验仿真结果可知:船舶在隧洞中航行的过程主要可分为船舶驶入隧洞、船舶在隧洞内航行和船舶驶出隧洞等3阶段,其船舶航行具有较为显著的区别。孟庆杰等[9-10]采用数值模拟的方法研究船舶进出构皮滩船闸过程,对其特征进行探讨,本研究相关结果与船舶进出船闸过程有一定相似性,但也存在明显的差异。
4.1.1船舶驶入隧洞阶段航行试验结果分析
船舶驶入隧洞的阶段的操纵航迹见图6。船舶在引航道中航行时操纵船舶较为顺畅,但船舶在邻近隧洞口门附近约30 m水域时,艏向开始偏荡比较厉害,保持航向存在一定困难,驶入隧洞口门后,在隧洞内200~300 m时阻力明显加大,船舶出现明显降速,航行速度约在2~3 kn。同时,船舶进入隧洞阶段,由于隧洞狭长,隧洞内光线变暗,眼睛无法立刻适应,驾引人员会感觉眼前一片漆黑,即产生黑洞效应。随着船舶逐渐进入隧洞内,驾引人员会逐步适应隧洞内的环境,但视野受到限制,无法对远处进行有效瞭望。因此,该阶段驾引人员受能见度变化的影响较大。

图6 船舶驶入隧洞阶段的操纵轨迹
在船舶驶入隧洞口门前,由于引航道宽度与航道宽度的差异,使船舶两侧流场具有不对称性,导致船舶存在侧向力与转艏力矩,可能会发生碰壁或者转艏的情况。特别是由于隧洞内水域环境既窄又浅,船体周围流场呈现明显的岸壁效应与浅水效应,因此,船舶在驶入隧洞过程中总阻力、侧向力和转艏力矩呈现明显的震荡。在船舶驶入隧洞后,由于洞内航道尺度狭窄,阻塞系数高,水流将被推入隧洞内而不能及时回流,导致隧洞内水位上升,增加船舶所受阻力。与船舶进出船闸研究不同的是,由于隧洞纵深较大,其出现阻力明显增加的位置不是进入口门的初始阶段,而是深入隧洞内200~300 m。
因此,从保障证船舶航行安全的角度来看,在船舶驶入隧洞的过程中,应在船舶进入隧洞前的初始阶段保持一定的航速,船舶航速宜控制在3~5 kn,对准口门中心线行驶,在口门附近水域应把定船舶航向,防止船舶偏荡撞击口门,进入口门后要保持匀速航行,把定航向。同时,为防止碰撞,应在船舶和隧洞进口门处采用一定的防碰壁措施。同时,为保障能见度剧烈变化对驾引人员产生的影响,应注意在隧洞入口段合理设置照明条件的过渡。
4.1.2船舶在隧洞中段航行试验结果分析
船舶在隧洞中段航行过程的操纵航迹见图7。船舶在进入隧洞内超300 m后船舶降速明显,但与此同时,在船舶隧洞中段航行过程中由于伴流的影响,航向相对稳定,速度也逐渐平稳。在操纵仿真过程中用车和用舵操作表明:船速控制在一定速度范围内(1.0~1.6 m/s)较为适宜,低于这一航速时,舵效降低明显;而超过这一速度时,加车时明显感觉航行阻力加大,速度提升不明显。当船舶航行至隧洞末端200~300 m时,随着越接近隧洞口,船舶水阻力逐渐变小,船舶速度逐渐增大。在船舶隧洞内航行时,能见度条件较洞外下降明显,因此,照明灯光对船舶瞭望存在较大影响,由于隧洞内缺乏参照物,驾驶船舶不易对准航道中心线位置,用舵不慎极易擦碰岸壁。同时,由于长时间在能见度不良的狭窄水道航行,驾驶人员心理压力变大,影响船舶操纵。

图7 船舶在隧洞中段航行过程的操纵轨迹
由于船舶进入隧洞内后附加质量增加,水动力变化明显,降低船舶航速。通航隧洞对通行船舶航行的影响主要体现在船舶阻力性能和吸底效应两个方面。在小断面系数航洞中航行时,存在一个临界速度,船舶航行时应尽量小于临界速度,因为,在临界速度范围内,船体周围的流态较复杂且不稳定,船舶的浮态亦很不稳定。为便于船舶对准,在隧洞顶沿航道中心线设置有效的灯光,便于船舶判断航道中心线并提供有效的照明。在隧洞内行驶时,驾引人员仍需保持高度注意集中,保持航向,船舶接近隧洞出口时,应适当控速,避免出隧洞后航速过大。
4.1.3船舶驶出隧洞阶段航行试验结果分析
船舶驶出隧洞阶段的操纵航迹见图8。当船舶航行至接近隧洞末端200~300 m时,随着接近隧洞口,船舶水阻力会逐渐变小,船舶航速会相对提高。船舶航行至隧洞口门附近30 m水域时,艏向偏荡比较厉害,把定航向会出现一定的困难。当船舶驶出隧洞时,驾引人员会因为光线突然变强,视觉也会变得模糊,无法立即看清隧洞外的环境,会对船舶驾驶产生一定影响。随着船舶逐渐驶出隧洞,驾引人员会适应隧洞外光线,视觉会变得清晰,视野也逐步变得开阔。
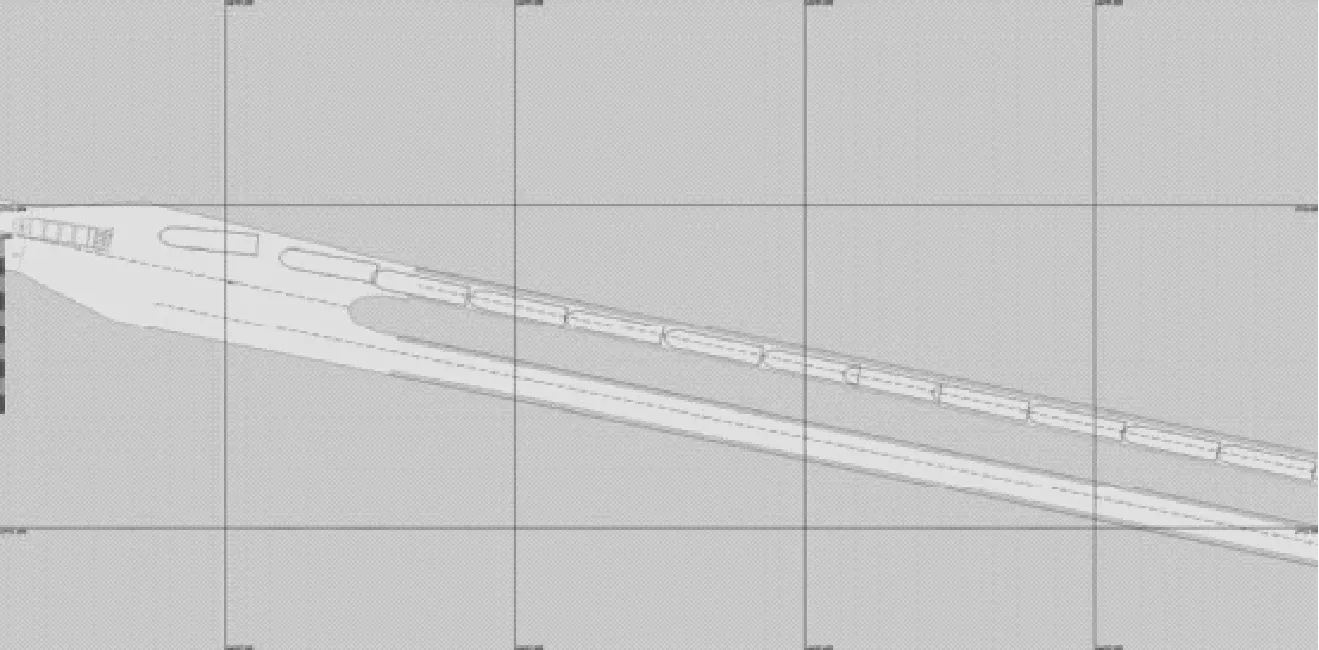
图8 船舶驶出隧洞阶段的操纵轨迹
当船舶接近驶出隧洞时,由于船舶两侧流场的不对称性,导致船舶所受侧向力与转艏力矩不为零。由于船体周围水域变得更宽阔,船体周围水体回流速度进一步下降,船舶所受阻力变小,船速增大。但由于流场的不对称性,船舶仍存在侧移与转艏的可能性,船舶航向不易操控。同时,长时间在隧洞中航行,单一的视觉环境容易使人产生生理疲劳,对外界感知和反应减弱。当船舶驶出隧洞时,光线变化剧烈极易产生白洞效应,对船舶驾驶产生较大影响。因此,从保障船舶航行安全的角度来看,在船舶驶出隧洞的过程中,驾驶人员应在距离洞口300 m处开始注意控制航速,在隧洞内设置提醒标志,提醒驾驶人员及早采取有效控速措施,驶出隧洞的速度不能太快,要留有足够多的时间调整船舶,以便顺利驶出隧洞。船舶距离洞口门越近发生碰壁或者转艏的可能性越大,因此,在船舶实际运行中,应加大洞口处防碰壁措施。
4.2 船舶制动试验结果分析
船舶在隧洞内航行过程中,可能由于一些紧急情况,需紧急制动,本研究选取了3种不同情况进行船舶制动试验。
1) 制动试验1:初始速度3 kn,船舶停车。
2) 制动试验2:初始速度3 kn,船舶Slow Astern倒车。
3) 制动试验3:初始速度3 kn,船舶Half Astern倒车。
制动试验1的船舶航迹见图9。船舶制动仿真试验冲程数据见表2。试验结果表明:由于船舶隧洞内航行时水阻力较大,因此,整体来看,船舶在隧洞内制动冲程距离较小。

图9 制动试验1的船舶航迹
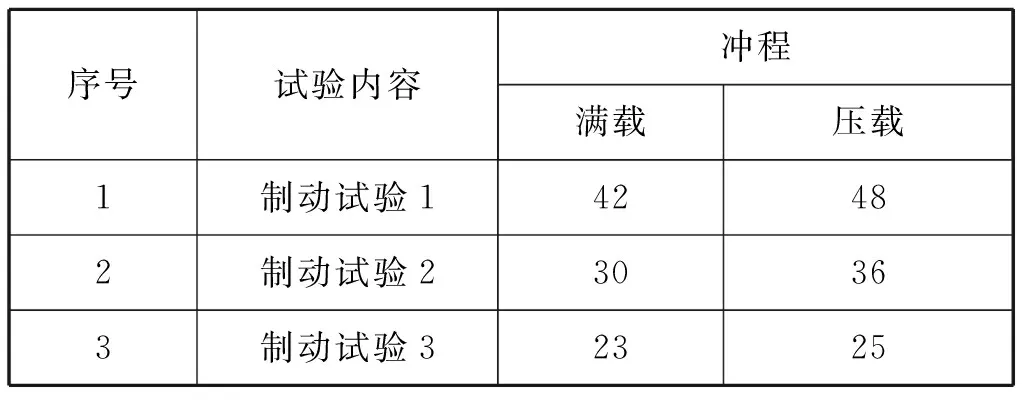
表2 船舶制动仿真试验冲程数据 m
船舶在隧洞内制动冲程距离较小,有利于在发生紧急情况下的船舶紧急停车,也为隧洞内连续多船航行时的船舶间距提供一定参考。但由于隧洞内航行空间狭小,距离太近会对驾引人员视觉和心理造成较大的压迫感,同时,由于隧洞内照明灯光对船舶瞭望存在一定影响,船舶无法及时对前船操作进行反应。因此,在保证通过能力的前提下,船舶应与前船保持至少5倍船长的船舶间距,在条件允许的情况下,应尽可能增加两船间距,以保证船舶通航安全。
4.3 船舶小舵角操纵试验
由于在隧洞内船舶保持航向多采用小舵角进行控制,故在进行试验时,控制舵角按照3°进行,当船舶航向变化1°时即可反向操作。试验结果表明:熟练的驾驶人员在正常条件下船舶操纵航迹带宽度约为15 m,较之目前隧洞16 m宽度的富余宽度很小,故隧洞内发生船舶擦碰的可能性很大。
为保证船舶及隧洞安全,一方面建议船舶进入隧洞前,需分别在船舶左右两舷安排专人,通过绳索控制轮胎等吸能装置于两舷侧,当存在发生擦碰情况时,可及时将碰垫置于船舶与岸壁之间,保证船舶和岸壁的安全;另一方面,在工程设计中应考虑适当增大隧洞内的航道宽度。
5 结束语
狭长隧洞是一类非常新型的枢纽通航建筑物,特别对于山区河流的水运发展意义重大。但由于对隧洞内船舶航行安全的相关研究还极少,本文利用先进的船舶操纵仿真模拟器,针对内河通航隧洞的船舶驾引及安全保障措施开展仿真试验研究。选取思林二线通航隧洞工程数据为对象,构建隧洞通航环境和代表船型模型,模拟操纵船舶在隧洞航行的过程,从仿真结果得出航行操纵和安全保障的结论。
1) 隧洞通航宽度狭窄,断面系数小,船舶在通航隧洞航行时受到阻力性能和吸底效应两个方面影响最大。船舶航行在隧洞内时,容易与隧洞岸壁发生擦碰,对船舶驾驶人员的操纵水平要求高。
2) 船舶在通航隧洞航行时,其航行操纵应注意3个阶段:
① 船舶驶入隧洞阶段进入口门处水流条件复杂,船舶由于岸壁效应、浅水效应等容易产生偏荡、撞击口门,在驾驶过程中应特别注意,并做好防碰撞措施,同时应保持一定航速;
② 船舶隧洞中段航行阶段,船舶驶入口门一段距离后会出现明显降速现象,中段航行时应保持一定速度,约为1.5 m/s,过低或过高都会导致船舶操纵困难或阻力快速增加;
③ 船舶接近隧洞口时,船舶又会出现明显增速现象,要求驾驶人员联合使用车舵,保持船舶航向,同时驶出隧洞后时应注意控制船速。
3) 隧洞内能见度较差,且与洞外变化明显。
① 驾驶人员应始终保持高度注意力,建议通过隧洞时驾驶台保持2人以上值班;
② 隧洞内尽力提供更好的照明条件,特别是沿着隧洞内航道中心线位置设置有效的灯光,便于船舶判断航道中线并提供有效的照明。
船舶通航隧洞作为一种新型的船舶通航设施,其安全运营均存在很多问题亟待研究,本文可为船舶在隧洞内安全通航提供有益的参考。