不同植被指数和无人机航高对草地盖度估测精度的影响
2021-03-11伏帅张勇辉李佳吕王萌榛彭璐冯琦胜梁天刚
伏帅,张勇辉,李佳吕,王萌榛,彭璐,冯琦胜,梁天刚
(兰州大学草地农业生态系统国家重点实验室/兰州大学农业农村部草牧业创新重点实验室/兰州大学草地农业教育部工程研究中心/兰州大学草地农业科技学院,甘肃兰州730020)
草地盖度指观测区域内植物的垂直投影面积占观测区地表总面积的百分比,是描述生态系统特征和草地生长状况的重要生态学参数和量化指标[1],可作为评价植被生产力、生态系统恢复程度、生态系统健康、生态系统服务功能等的有效指标之一[2]。
目前,草地盖度的估测方法主要包括实地测量和遥感估测两种途径。传统的地表实测方法包括目估法、针刺法和仪器法等,这些传统方法由于费时、费力等缺陷而逐渐难以满足目前的草地调查工作[3]。照相法是垂直于地面照相后,通过照片估算草地盖度的方法[4]。随着数字摄影技术的快速发展,将数码相机与图像处理技术相结合的照相法因其具有准确、迅速、低价、简便等优势在传统地表实测方法中脱颖而出,目前已成为最普遍、最有效的盖度测量方法[4-5]。然而,地表实测法缺乏宏观性,其观测范围往往被限制在较小的空间尺度范围内,不利于快速对较大范围的草地进行观测。无人机(unmanned aerial vehicle,UAV)是一种自备动力装置和导航模块的无人驾驶航空器[6]。近年来,UAV 及其相关技术发展迅速,其能够实时获取高分辨率遥感影像数据,机动性强,成本低廉,操作简便,正逐步成为地面监测和高空遥感的有效补充手段[7],现已被广泛用于生态系统监测[8]、工程测绘[9]、灾害监测[10]、农业生产[11]等方面。植被指数是植被遥感监测中被广泛应用的参数之一,是对地表植被状况简单、有效和经验的度量[12]。国内外学者为了方便植被状况的识别,利用绿色植物在可见光波段的反射特征,构建了一系列植被指数,如超绿指数(excess green index,ExG)[13]、植被因子指数(vegetativeindex,VEG)[14]、综合指数(combined index,COM)[15]等。这些植被指数能够增强绿色植物与其他地物的对比,通过波段计算和阈值设定,从而精确分离绿色植被和背景。目前,已有学者将无人机与植被指数结合,开展了一些关于植被调查、盖度计算等方面的研究。如丁雷龙等[16]以小麦(Triticum aestivum)为研究对象,选取归一化绿红差值指数(normalized green-red difference index,NGRDI)、 超 绿 指 数(excess green index,Ex G)、超绿超红差分指数(e x c e s s g r e e n minus excess r ed i ndex,ExGR)和绿叶指数(g r een l ea f index,GLI)4 种植被指数,基于最大类间方差法对无人机图像中的植被区域与非植被区域进行识别,结果表明4 种植被指数均有较高的识别精度。刘艳慧等[5]利用无人机获取草地大样方图像,通过计算植被指数从而估算草地盖度和生物量。但是,目前的相关研究多集中在植被指数的应用和评价上,关于无人机航高、草地盖度等可控应用条件的研究还很匮乏。
为此,本研究以兰州大学榆中校区草地为研究对象,选用ExG、VEG、ExGR[17]、GLI[18]4 种可见光植被指数,通过提取无人机图像的草地植被信息,计算草地盖度。以地面照相法获取的草地盖度为参考值,从无人机航高和盖度水平两个方面对比分析4 种植被指数方法的草地盖度估算效果,研究4 种植被指数在草地盖度估测方面的适用性,以期为无人机在草地资源监测中的应用提供理论依据和参考。
1 材料与方法
1.1 研究区概况
试验在兰州大学榆中校区校园内草地、试验田进行。试验区位于甘肃省榆中县,地理位置104°08′−104°09′E,35°55′−35°56′N。气候属于温带大陆性气候,年均温6.6℃,年降水量3 0 0~4 0 0mm,海拔1 7 2 0m。
1.2 数据获取
根据目视估计法将待测样地按盖度大小分为3 个水平:高盖度(70%~100%)、中盖度(40%~70%)和低盖度(40%以下)(表1)。在校区内,每个盖度水平选取2 个地势平坦、生长状况均一的样地,每个样地大小为25m×1 5 m(图1)。每一样地采用五点法布设样方,样方大小为0.5m×0.5m 个样方中心记录GPS(全球定位系统,Gl oba l Pos i t i on i ng System)经纬度和高程信息。利用手机相机于样方中心上方约1m 高处垂直向下拍摄记录。手机照片分辨率为2976×3968 像素,对每个照片用Pho t oShop2018 软件按照样方大小进行裁剪,以便后期处理。使用大疆Phantom4 p r o 无人机(搭载相机2 000 万像素,镜头焦距8.8mm,1 英寸影像传感器)从2 0 m 航高开始,每隔10m 航高对同一样地进行拍摄,拍摄到1 0 0 m航高为止,得到无人机图像,同样使用PhotoShop 2018 软件对相同区域进行裁剪(图2),以便后期处理。无人机照片于2019年4 月−5 月草地生长期间拍摄。

表 1 各盖度水平样地比较Table 1 Comparison of different coverage levels
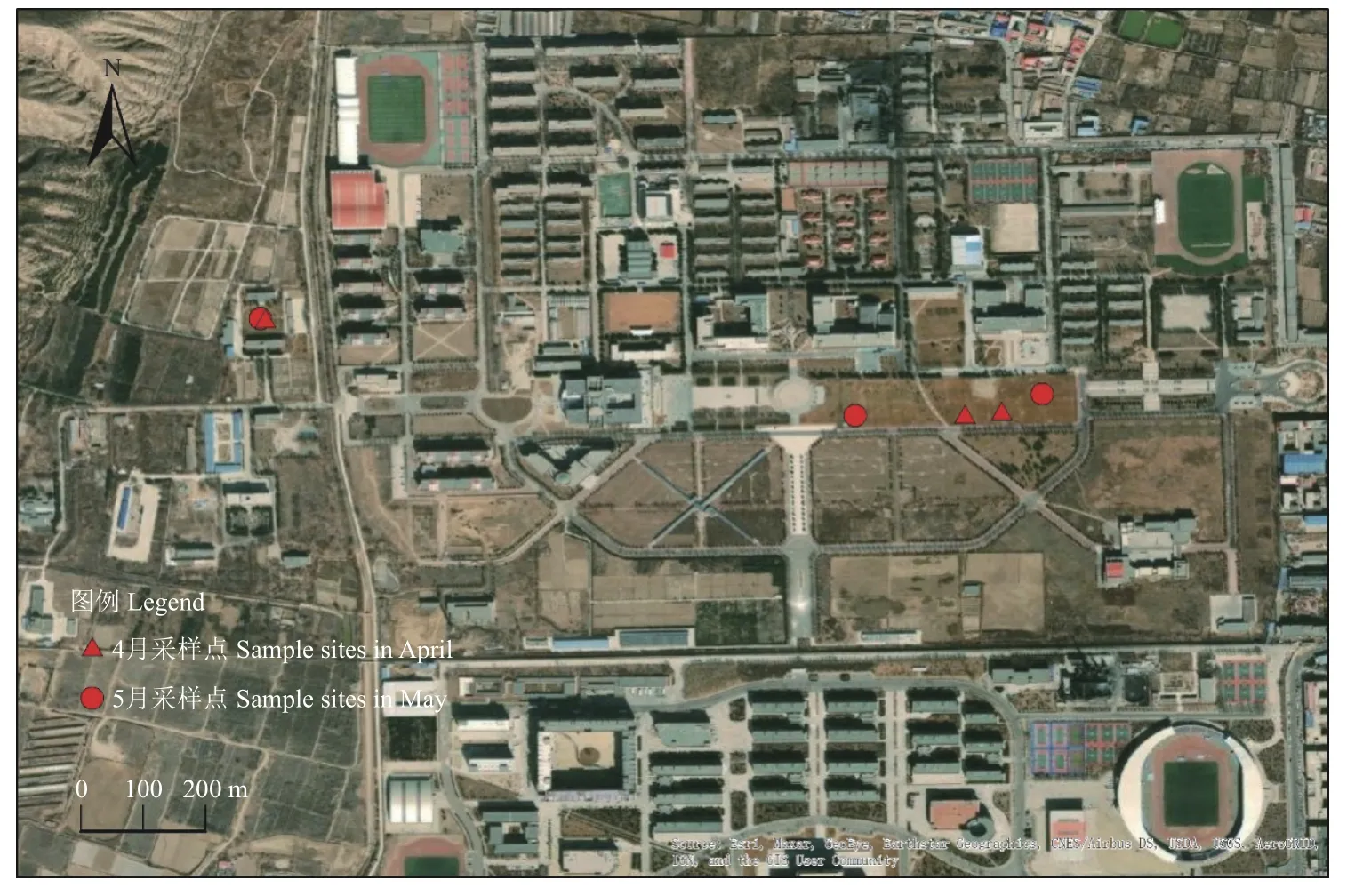
图 1 研究区及采样点分布图Figure 1 Study area and distribution of sam p ling points

图 2 不同航高无人机图像对比图Figure 2 UAV images at different altitudes图中不同航高无人机图像之间以原始尺寸比例显示。In the figure,the UAV images at different altitudes are displayed in proportion totheoriginal size.
1.3 研究方法
本研究选用植被因子指数(VEG)、超绿指数(ExG)、超绿超红差分指数(ExGR)、绿叶指数(GLI)4 种植被指数方法,利用ENVI5.3 软件的波段计算模块对所有照片进行处理(图3),植被指数的计算公式参考表2。通过反复调试设定阈值,准确划分草地像元与背景像元,并以草地像元占图像总像元数量的比例作为草地盖度。为了减少人为主观误差,每2 人计算得到初步结果后,由第3 人审核并校正错误值,取校正后的平均值为盖度估测值。

图 3 样地无人机图像及植被盖度提取效果Figure 3 UAV im age and vegetation coverage extraction effect of the samp led land
为了客观定量地进行植被指数的适用性分析,本研究以照相法获得的盖度平均值作为样地的盖度参考值,引入平均绝对误差(mean absoluteerror,MAE)、标准差(standard deviation,SD)和精确度[19](accuracy,Acc)3 种评价方法。计算公式如下:

式中:x′为草地盖度参考值,xi为草地盖度估测值,n 为样本总数。

表 2 植被指数公式Table 2 Formula table of the vegetation indices studied
2 结果与分析
2.1 4 种植被指数精度评价
将本研究中所有无人机照片的盖度计算误差汇总成表3。从4 种植被指数的估测误差来看,VEG、ExG 方法的估测精度较高,ExGR、GLI 方法的估测精度较低。VEG 和ExG 方法的精确度均在90%以上,其中,VEG 方法的MAE 最低,为4.53%,ExG方法的平均精度最高,为93.60%;ExGR 和GLI 方法的MAE 均超过10%,GLI 方法的平均精度最低,为75.95%。从估测数据的波动性来看,VEG 方法的标准差最小,ExG 方法次之,ExGR 和GLI 方法的波动性较大。综上,本研究中VEG、ExG 方法的估算精度较高,误差较为稳定;ExGR 和GLI 方法的精度较低,误差相对不稳定。

表 3 基于4 种植被指数的草地盖度估测误差表Table 3 The estimation error table of grassland coverage based on four vegetation indices %
2.2 不同草地盖度水平对草地盖度估测精度的影响
为了评价不同草地盖度水平对基于植被指数的草地盖度估测精度的影响,以6 个不同样地的54 张无人机照片为样本,利用植被指数计算草地盖度。以盖度参考值为横轴,以样地的平均精度为纵轴,作散点图进行趋势分析,对比分析草地植被盖度对植被指数估测精度的影响。
基于4 种植被指数的草地盖度估测精确度整体上均呈现出随盖度水平的增加而降低的趋势(图4)。ExGR 和GLI 方法的回归系数均较小,决定系数均大于0.8,说明其估测精度受草地盖度水平的影响较大,精度趋于降低,其在低盖度水平拥有80%以上的估测精度,但在高盖度水平迅速降低至70%左右。因此,这两种方法对低盖度草地有更好的估测效果,在高盖度草地上的估测效果明显降低。VEG和ExG 方法的回归系数均接近0,表明其估测精度受盖度变化的影响较小。其中VEG 方法的回归系数最接近0,精度从低盖度的93%左右降低至高盖度的90%左右,可见其估测精度受盖度的影响很小,在任何盖度水平的草地上均能发挥较好的估测效果;ExG 方法的决定系数为0.837 6,回归斜率为−0.112 6,其在低盖度有高达97%的精确度,在高盖度降低至90%,表明其估测精度虽随盖度增加而减少,但不影响其估测性能的发挥。
2.3 无人机航高适用性分析
为了评价不同草地植被盖度水平下无人机航高对草地植被盖度估测精度的影响,本研究以6 个样地拍摄的不同航高的54 张无人机照片为样本,计算20~100m 航高下的草地植被盖度。以无人机航高为横轴,以高、中、低3 种盖度水平估测的平均精度为纵轴,作散点图进行分析(图5)。
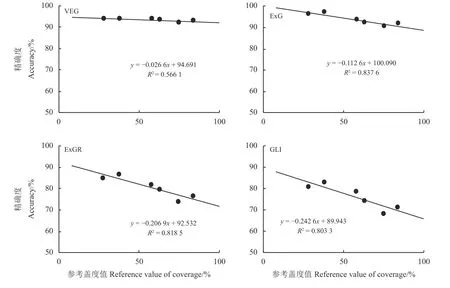
图 4 植被指数估算精确度与盖度趋势分析Figure 4 Relationship between the accuracy of the vegetation indices and coverage

图 5 各盖度水平下植被指数估测精度与无人机航高的关系Figure 5 Relationship between the estimation accuracy of the vegetation indices and UAV flight height at different coverage levels
VEG 方法于高、中盖度水平下的精度与航高无明显关系,具有较大波动性,高航高估测精度与低航高盖度估测精度无明显的差异,准确度保持在90%以上;但是低盖度水平下的精度在航高高于40m时,随航高升高而迅速下降,准确度由96%降低至66%。VEG 方法在高、中盖度水平下保持着较高的精度,且与航高变化无明显关系,为了发挥无人机大面积快速监测的优势,可选择航高100m 进行高、中盖度水平的观测;其在低盖度水平下的精度随航高上升而迅速下降,选择40m 航高进行观测能尽可能发挥无人机大面积观测的优势,同时能够保持较高的精度。ExG 方法在高、中盖度水平下的估测精度随航高无明显变化;在低盖度水平下的估测精度具有较大的波动,其趋势线波动幅度随航高上升不断增大,尤其是航高高于80m 时,趋势线波动幅度最大达到15%,说明高于80m 航高后其观测性能极不稳定。ExG 方法在高、中盖度水平下均可选择100m 航高进行观测,而在低盖度水平下最好于8 0 m航高进行观测。ExGR 方法在高盖度与中盖度水平下的估测精度随航高无明显变化,但在低盖度水平下出现明显的波动,即航高在高于80m 后精度陡然上升,之后呈现下降趋势,这表明ExGR 方法在航高高于80m 后不稳定因素增加。因此,ExGR 方法在高、中盖度水平下可选择100m 航高进行观测,在低盖度水平下应在最高80m 航高进行观测,以达到最大观测面积和保持较稳定的观测性能。GLI 方法在高盖度水平下的精度随航高变化趋势不明显;但其在中、低盖度水平下的精度随航高升高而明显下降,准确度下降幅度达到10%。所以,GLI方法在高盖度水平可选择100m 进行观测,在中、低盖度水平最好选择20m 航高进行观测以保持较高的精度。
为了更直观地查看各植被指数最适航高的分析结果,表4 列出了不同植被指数在各盖度水平下的最适航高。
3 讨论
VEG 与ExG 草地盖度估测精度均达在93%以上,具有优秀的估测性能,并且估测精度随盖度增加而降低,这与丁肖等[19]对手机拍摄相片的草地植被盖度估算的研究结果相似。ExGR 与GLI 草地盖度估测效果较差,这在一定程度上反映了这两种方法对经验阈值法的不适用性,另外人为主观因素也可能是导致其误差较大的重要因素之一。本研究中的草地盖度信息是通过基于经验阈值法的处理方式而获取的,所以处理人员的主观性会不可避免地对处理结果造成一定影响。为了提高估测精度,应尽量取多人处理结果的均值为最终盖度估测值。

表 4 各盖度水平下UAV 最适航高Table 4 The optimal airworthy height of UAVs at each coverage level
无人机的航高决定了其草地观测面积的大小,100m 航高的对地观测面积几乎是2 0 m 航高对地观测面积的25 倍,因此提高无人机航高能够有效增加观测面积,提高草地监测效率。本研究确定最适航高的目的是为提高无人机草地监测的效率,在确定最适航高时,选择精度差距在可接受的范围内选择更高的飞行高度。由此确定了VEG、ExG、ExGR和GLI4 种方法的盖度估测最适航高,并归纳在表4中。在盖度计算时,若航高过高,拍摄的照片可能会不够清晰,对草地的识别效果产生影响。葛静等[3]比较了航高为30 和100m 时无人机航拍计算草地盖度的效果,发现航高30m 的拍摄方法远优于航高100m 的方法,分析原因可能是无人机搭载的相机在100m 航高下不能满足拍摄需求。而本研究中应用的植被指数方法在部分盖度水平下,航高对盖度估测精度的影响差异不显著,说明本研究中无人机搭载的相机在较高的航高下也能满足盖度估算的需求。因此,改进无人机技术、提高其相机分辨率对未来草地资源调查的应用和发展具有重要的作用。
4 结论
本研究以兰州大学榆中校区草地为研究对象,选用VEG、ExG、ExGR 和GLI 4 种植被指数估测草地盖度,评估了4 种植被指数的估测性能,从无人机航高、草地盖度等角度进行了植被指数的适用性分析,得出以下结论:
1)VEG 和ExG 方法的平均精确度均在93%以上,属于较精确的草地盖度估测方法。其中VEG 方法精度高、误差稳定,其估测效果优于其他方法;ExG 方法的估测精确度最高,达到93.60%,但其误差稳定性不如VEG 方法;ExGR 与GLI 方法的精度与误差稳定性均较低,估测性能较差。
2)4 种方法的估测精度均随盖度增加而降低。VEG 方法估测草地盖度的精度受盖度水平的影响最小,在不同盖度水平的草地上均具有较精确的估测效果;ExG 方法次之,其估测精度随草地盖度增加而有轻幅度的降低,但依然能够保持高精度估测;ExGR 和GLI 方法对高盖度草地的估测效果较差,其估测精度随盖度增加明显降低。
3)VEG 方法在高、中盖度水平下的最适航高为100m,在低盖度水平下为4 0 m;ExG 和ExGR 方法在高、中盖度水平下的最适航高为100m,在低盖度水平下为80m;GLI 方法在高盖度水平下的最适航高为100m,在中、低盖度水平下为2 0 m。
本研究中,基于经验法的阈值确定方法可能会对研究结果产生影响。因此,研究各类植被指数区分植被和非植被的阈值自动提取算法将是基于RGB图像的草地盖度监测亟待解决的问题之一。本研究使用无人机技术与RGB 植被指数方法相结合估测草地盖度,这种方法对草地动态监测、植被调查等方面的快速、精准作业具有重要意义,成功实现处理自动化与批量化将是后续研究的重要方向。