浅谈网格架在平房仓施工中的应用
2021-03-11周跃忠张志伟林炳燃
◎ 周跃忠,张志伟,林炳燃
(杭州市仁和粮食储备有限公司,浙江 杭州 310000)
粮食安全是建设和谐社会的基础,粮食安全对国家稳定、改革的顺利进行以及经济持续、健康向前发展具有重要作用。为了增强粮食储备安全,新的储粮食仓型不断涌现,在建设过程中难度也不断加大,因此采用一些新工艺、新技术施工迫在眉睫。网格架就是在建造大跨度、新型高难度仓房施工中所采用的新工艺、新技术,不但节约施工中的成本、缩短建设周期,而且还能提高施工的安全系数等级。
随着仓房建设的复杂性增加,大跨度、高堆粮线的仓房在不断投入使用,采用新技术、新材料粮仓的施工不断涌现,给工程管理也带来一定的挑战。因此,应不断提高工程管理水平,促进工程高效建设,进一步提升安全性。
1 支撑网格架
网架结构为正交四角锥螺栓球形网架,网架呈平面布置,结构支撑形式为上、下弦支撑。
材质采用Q235B无缝钢管,螺栓球材质采用45#钢。支座肋板为碳素结构钢。网架采用球节点螺栓联接方式,螺母孔与轴之间的角度不大于±10°,螺纹到球心螺孔端面之间距离的误差为±0.1 mm。
如图1所示的网格架拼接中,在螺栓球节点上安装球托,放置钢檩条,铺设次檩条和木方及1.4 cm建筑木模板。最小杆件截面为φ75.5 cm×3.75 cm;最大杆件截面为φ159 cm×6 cm;材质为Q235B钢。
2 格架下弦球定位调节装置
根据事先确认的支座轴线和标高,连接各支座间的下弦杆,待复测各支座的平面位置与标高准确后,并将支座点焊固定在柱顶埋件上,然后按正放四角锥网架安装方法进行安装(如图2~图4),网架安装步骤:①垫好下弦球的平面,下弦杆件与球一次拼接到位。②腹杆与上弦球形成一个四角锥形,腹杆与上弦球一次拼接到位(如图4)。③上弦杆与螺栓球、下弦球拼接依次进行。④整个吊装单元拼装完成进行一次全面检测,在整个网架拼装过程中,要特别注意几何尺寸的控制。⑤在网架结构拼装施工全过程中应要求杆件与球体面之间无缝隙。⑥网架安装后,应检查螺栓球球上的孔洞是否封闭,防止水分渗入,使球、杆件丝扣锈蚀。
图2 下弦调节垫块图
图3 地面拼装定位点图
图4 连接杆图
3 支撑网架的顶升装置
顶升装置由升降支架、液压缸、连接架、液压动力系统和PLC控制系统等组成,每台液压动力系统控制一只油缸,PLC控制系统通过每台液压缸的位移传感器控制液压动力系统电磁阀的通断,通过液压动力系统上的压力值,计算出该液压缸压力[1-2]。
3.1 升降架构造
顶升支架的设计综合借用了塔吊的设计理念,采用标准节支架结构,千斤顶本体高度1.4 m,行程最大1.05 m。支架结构为网格构造式,平面轴线尺寸1.2 m×1.1 m,以1.05 m为一个顶升行程标准节;顶升架按照承载力80 t,高度35 m设计、制作,总组合高度根据顶升高度确定,标准节与标准节间的连接采用法兰螺栓连接,拆卸十分方便,如图5~图8所示。
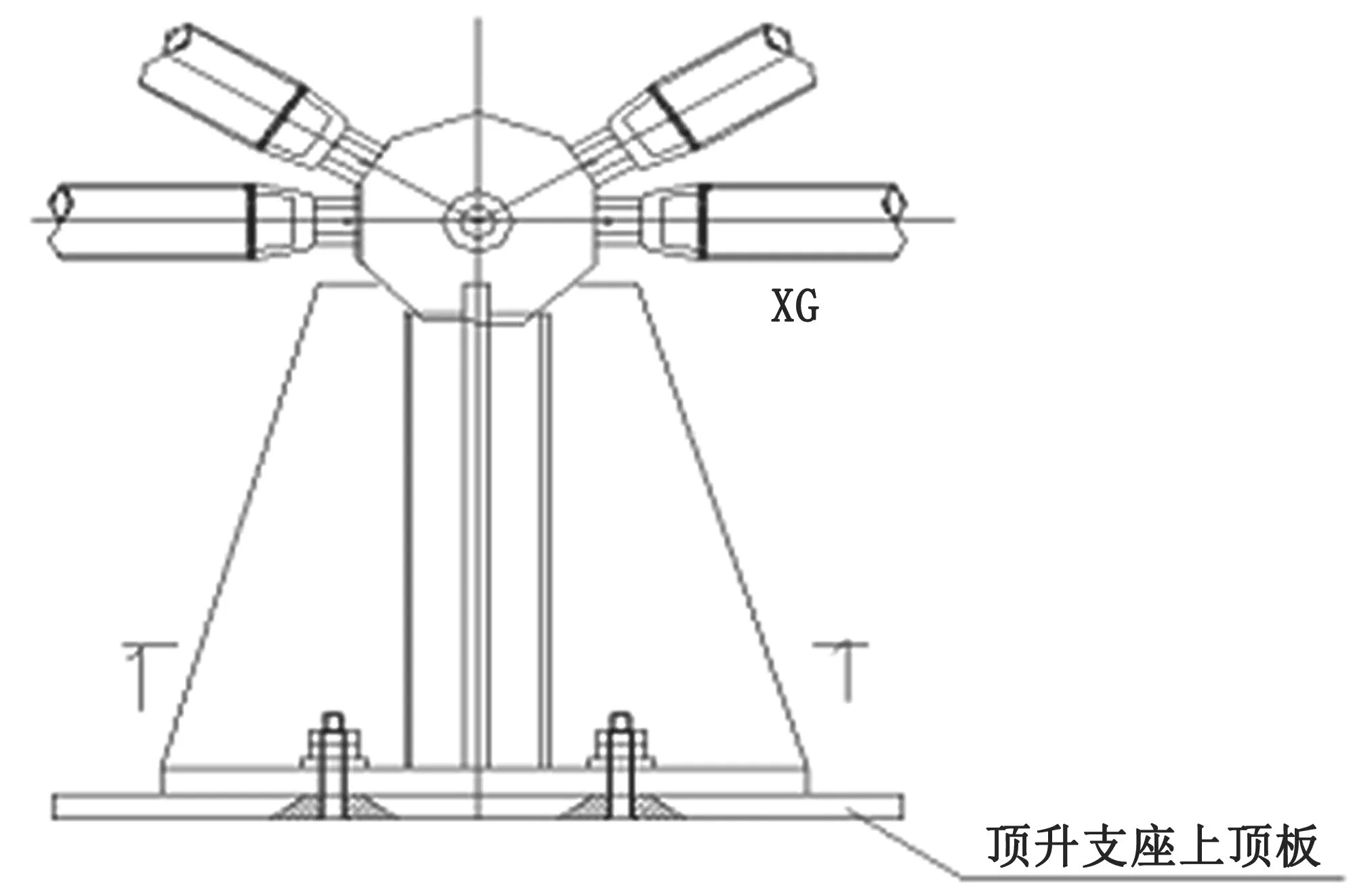
图5 顶升支座图

图6 升降架俯视图
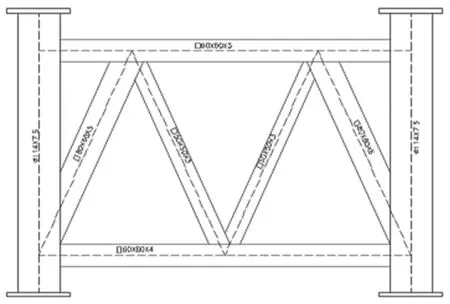
图7 升降架剖视图
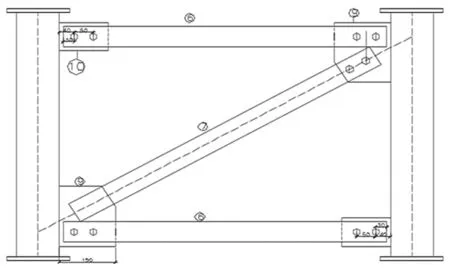
图8 升降架侧视图
3.2 顶升架的构成
顶升架的材料见表1。
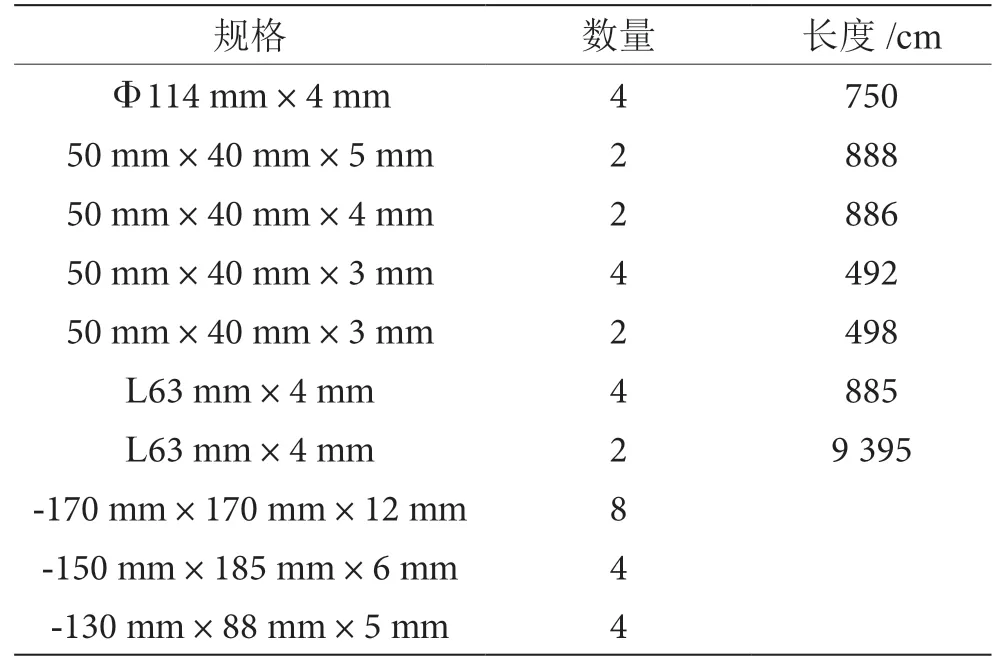
表1 顶升架的重量计算材料表
4 液压顶升系统
采用地面拼装,整体顶升。顶升阶段的荷载为:网架自重+檩条及模板材料自重+5 kN·m2施工荷载,下方设置8个顶升立柱,承载能力足够。顶升立柱上部利用支托支撑住网架的上弦节点,如图9所示。
每台液压动力系统控制一只油缸,PLC控制系统通过每台液压缸的位移传感器控制着液压动力系统电磁阀的通断,通过液压动力系统上的压力值,算出该液压缸压力。
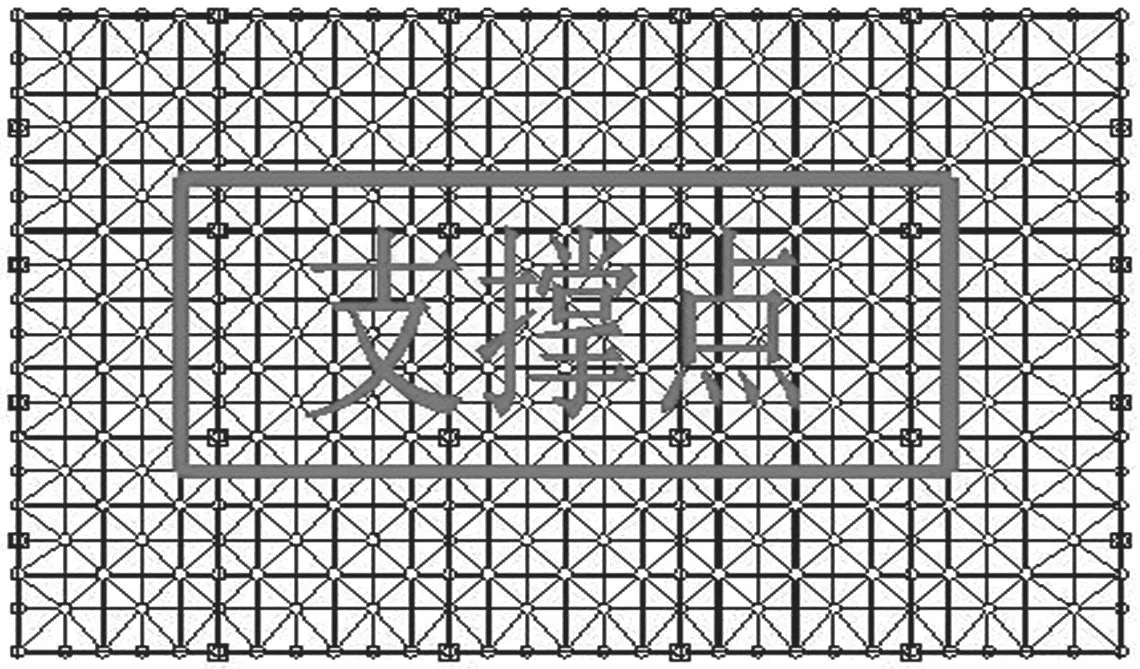
图9 升降架的支撑点图
4.1 升降架承载点计算
顶升设备的支架设计承载力为100 t,80 t千斤顶的起重量以70%计算,承载点计算如图10所示。
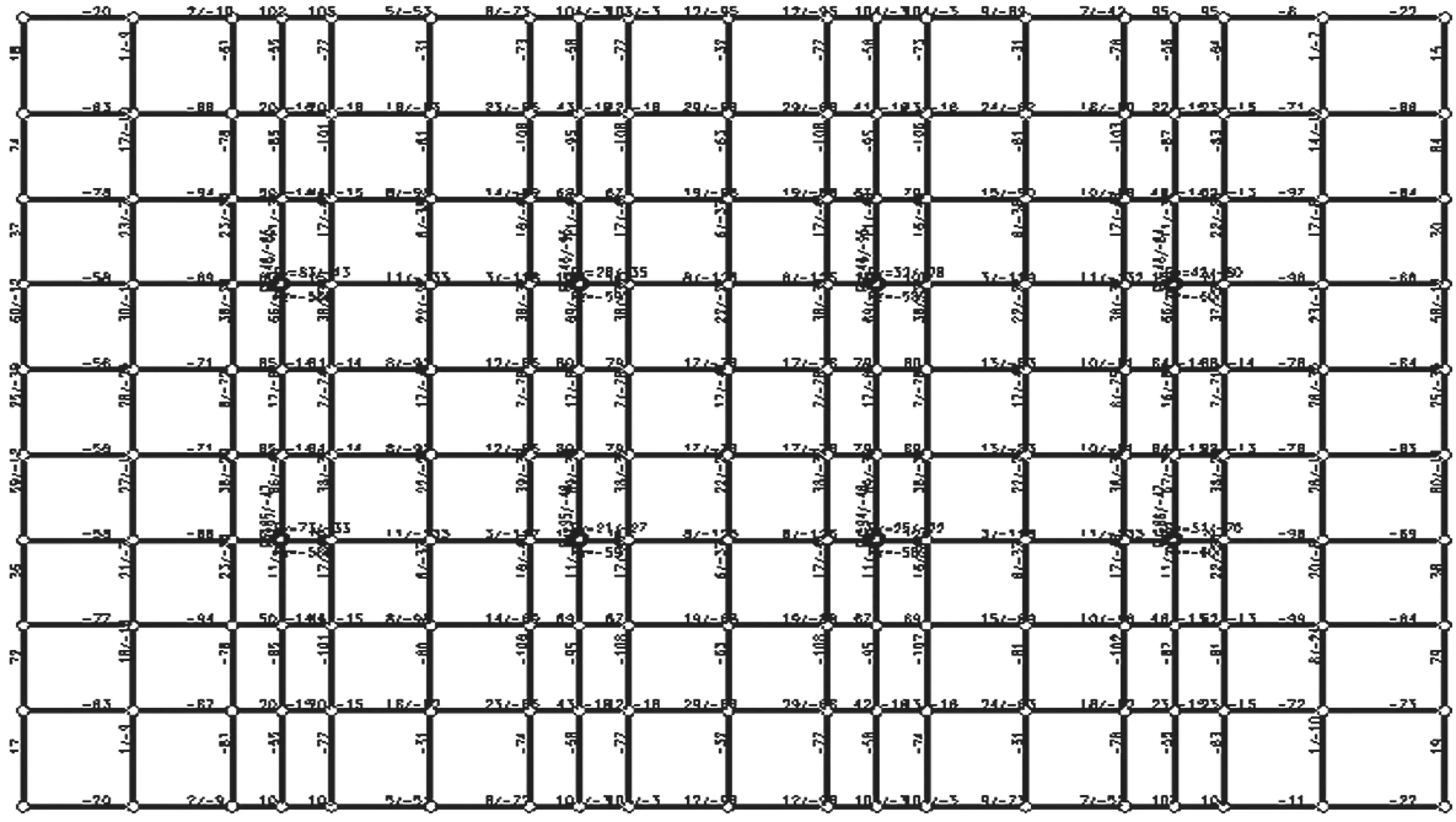
图10 承载点计算图
4.2 液压动力系统
液压动力系统工作注意事项:①泵站输入电压380 V,电气线路可靠接地,系统全部安装完毕后,经检查机体不带电后,方可使用。②泵站的工作介质为L-HM32液压油,环境温度低于10 ℃时,可使用L-HM15液压油;环境温度高于40 ℃时,可使用L-HM46液压油。③油液面保持在油标中心线以上,防止油泵吸空,造成油泵零件损坏。④泵站出厂时调定的压力值严禁在工作中任意提高。⑤启动前电磁换向阀处于中位,点动数次,以防油泵吸空,正常后,方可进行工作。⑥泵站连接液压缸时,泵站上的节流阀口必须接液压缸的下腔,严禁接错。否则,极易造成液压缸零件的超压破坏。⑦液压顶升系统每台千斤顶有液控单向阀,节流阀调节千斤顶的升降速度。
4.3 控制系统
(1)控制系统分手动和自动控制两种操作模式。每种控制模式又分单机手动和自动两种控制方式。
(2)系统配有蜂鸣器,在出现故障时会发出声光报警,提示操作人员及时查找和处理。
(3)控制系统采用以太网技术,实现数据稳定传输。
(4)工作系统界面,计算机操作界面如图11所示。

图11 计算机操作界面图
(5)系统启动后会自动切换到控制页面,页面中位移会随着数据变化而变化,同时数字显示的是该液压缸当前行程的位置,升降的同时会有动画画面显示,如图12所示。

图12 监控系统界面图
(6)自动控制前参数的设定。①目标值的设定。当液压缸升降到设定目标值时,液压缸将不在增加,液压缸停止工作。②步进量设定。所有顶升点在进行自动同步顶升作业时,目标位移每次增、减量,就是顶升位移的行程距离,顶升作业即停止推进,主控站再给出下一次顶升目标值。③步进间隔设定。当液压缸行程达到设定值后,控制系统即发出下一次设置目标值。④步进时间设定。当液压缸在自动系统控制作业的过程中,达到了设定时间值,液压缸行程没有到达设定目标时,该顶升作业开始报警。⑤下降位移值的设定。当液压缸在自动系统控制作业的过程中,达到了设定时间值,待检确认后,液压缸应从目标值位返回到设定值。⑥当前值的设定。当前值的设定,是由各液压缸行程的距离所决定。⑦参数值的设定,如图13所示参数值设置。
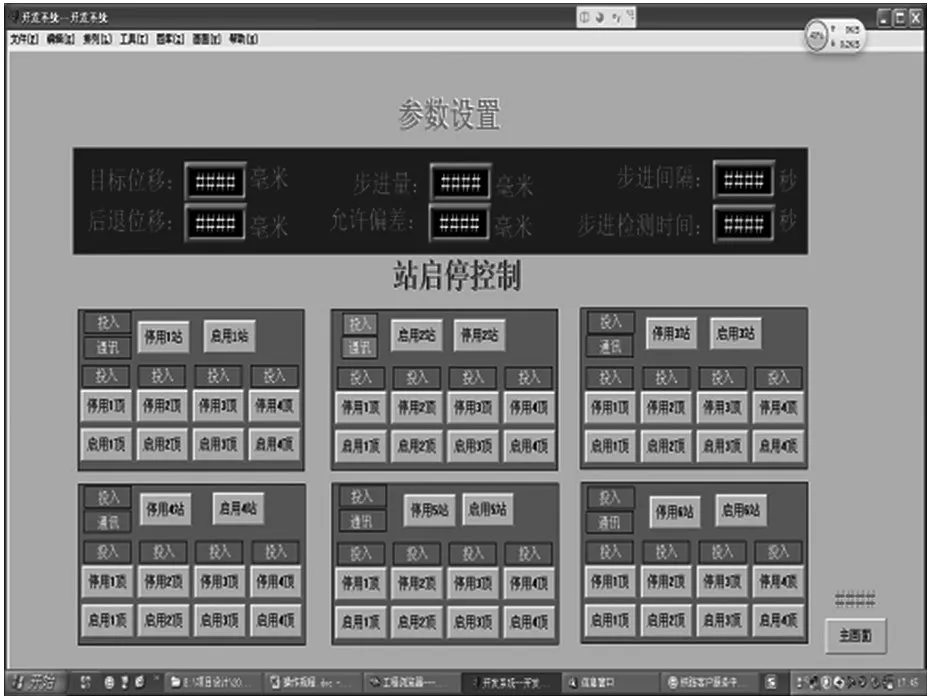
图13 参数值设置图
4.4 顶升过程网架的验算
网架顶升前应对网架进行验算,验算采用原始设计程序,去除网架安装过程中不存在的屋面静荷载及部分活动荷载。计算时仅考虑网架自重以及20%的风载,顶升点承受Z向力,固定截面进行分析。检验是否出现超应力杆件及顶升过程中的挠度是否在规范允许的范围内。如发生超应力杆件或挠度超标,则调整顶升位置、调整超应力杆件截面或增加顶升点,直至满足要求为止。计算见图14~图17。
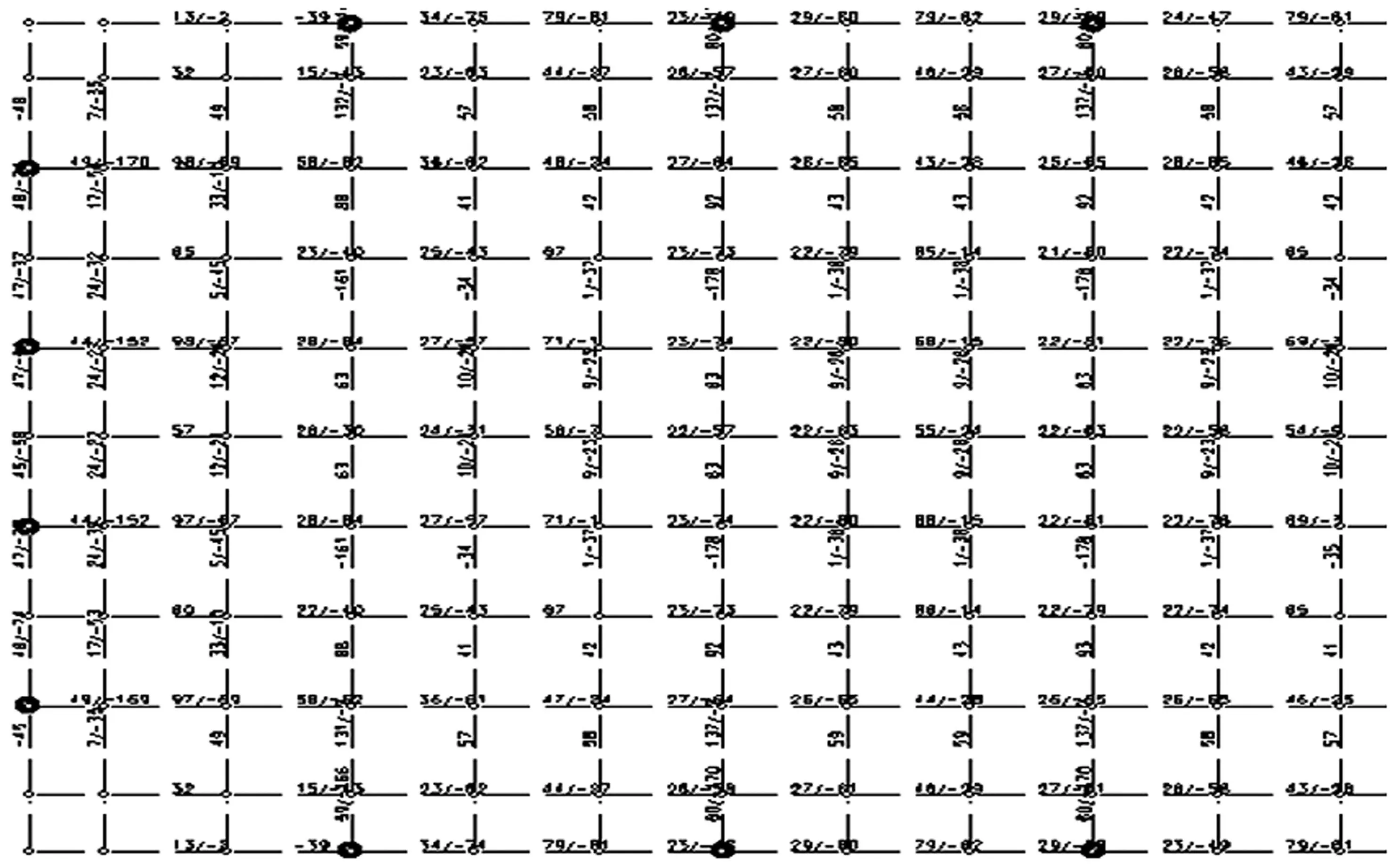
图14 上弦超应力图

图15下弦超应力图
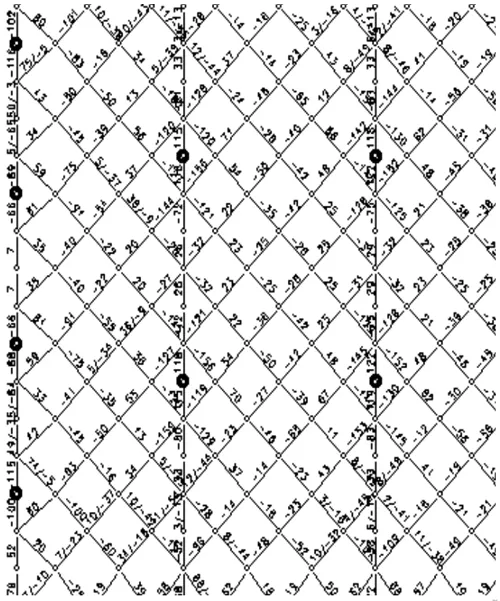
图16 腹杆超应力图
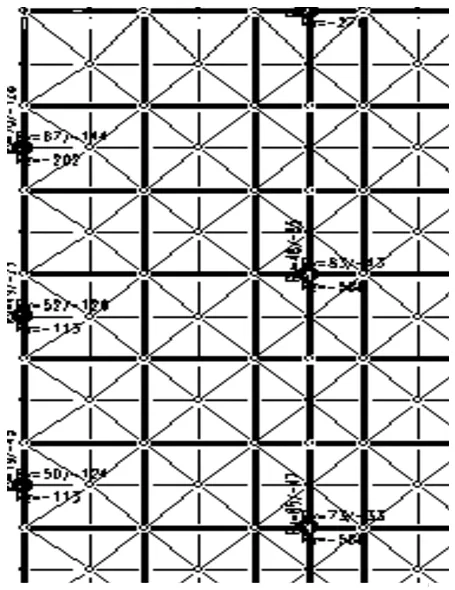
图17 反力验算图
5 结论
在大型仓房内采用网格架进行施工:①减少了仓房砌墙时层层搭设脚手架的繁琐步骤,还能满足部分材料堆放和施工人员的安全性。②在砌墙施工完成后,能够拼接成楼层模板,进行楼层面的浇筑使用,减少重复支模。③在之后的顶面抹灰、墙体粉刷免除在搭设脚手架。