纸箱提手整理装置凸轮机构设计
2021-03-10牛振华许洪振刘姣娣
牛振华 许洪振 刘姣娣 李 强
(桂林理工大学机械与控制工程学院,广西 桂林 541006)
食品饮料包装领域多采用纸箱包装。中国在纸箱包装领域的市场份额大,越来越多的产品为提高便利性,通常采用提手纸箱包装形式,提手纸箱需求量不断增长[1-2]。目前,在中国纸箱提手的安装方式仍以人工安装为主,效率低,用人成本高[3],能否实现机械自动化安装,成为制约纸箱包装行业快速发展的关键问题。刘庆峰等[4]设计的包装箱提手安装设备,能够对已整理好的提手进行自动安装,但是无法实现零散提手的整理;程超等[5]研究的纸箱提手穿带装置能够对新型提手带(无纺布带、特制纸带)等进行安装,但是无法实现承受力更大的塑料提手的安装。目前未见有关零散提手整理装置的台架试验研究的相关报道。
研究拟提出一种纸箱提手自动整理装置,能够实现零散提手的自动整理,并对提手挂取阶段可能出现的提手重叠、倒挂、反挂等进行剔除,通过解析法设计整理装置的关键部件凸轮机构,对其进行运动学仿真和静力分析,并通过台架试验验证机构设计的合理性,以期为纸箱提手的自动安装提供思路。
1 纸箱提手整理装置结构及工作原理
纸箱提手整理装置主要由凸轮、提手挂杆、剔除推杆、提手输送装置等部分组成,如图1所示。提手挂杆由链条带动,剔除推杆与凸轮轮廓接触,通过凸轮的转动进行往复运动,从而实现提手的挂取和剔除,最终由提手输送装置将整理好的提手输送至后续的提手安装工位。其中,对凸轮轮廓曲线的设计是能否实现提手挂取和剔除的关键[6]。

1. 提手输送装置 2. 提手挂杆 3. 机架 4. 凸轮 5. 链条 6. 剔除推杆 7. 提手料箱
凸轮机构的工作原理:提手挂杆在链条的带动下进入提手料箱挂取提手,当提手到达指定位置时,凸轮机构通过导杆带动剔除推杆,剔除推杆在导杆的带动下往复运动(如图2),进行剔除作业,机构通过提手挂杆和剔除推杆的配合来实现提手的挂取和剔除动作,完成提手的整理,有效剔除提手挂杆挂取过程中存在的重叠、反挂和交叉等无效提手(如图3)。
纸箱提手整理装置运动需要经过提手挂取、无效提手剔除动作,根据工作要求,可相应地将凸轮划分为如图4 所示的4个工作段。
(1) 提手挂取段AB:当导杆与凸轮轮廓A点接触时挂取动作开始,此时导杆绕A顺时针摆动,推杆挂取提手后由推杆带动到达剔除作用起始位置B。
(2) 提手第1次剔除段BC:在此阶段,提手挂杆停止运动,提手到达预定的剔除位置,提手剔除推杆在导杆的带动下实现第1次剔除作业到达C点。
(3) 提手第2次剔除段CD:从C点开始,提手剔除推杆从距离提手最远位置开始进行第二次剔除作业,将提手挂杆上的零散提手中倒挂和反挂的提手进行剔除。
(4) 提手第3次剔除段DA:提手剔除推杆重复第1次和第2次剔除运动,将前两次剔除作业中剔除不彻底的无效提手剔除出提手挂杆,至A点完成一次完整的剔除作业。 为下一次提手挂取和剔除作准备。

1. 导杆 2. 凸轮轴 3. 剔除推杆 4. 凸轮
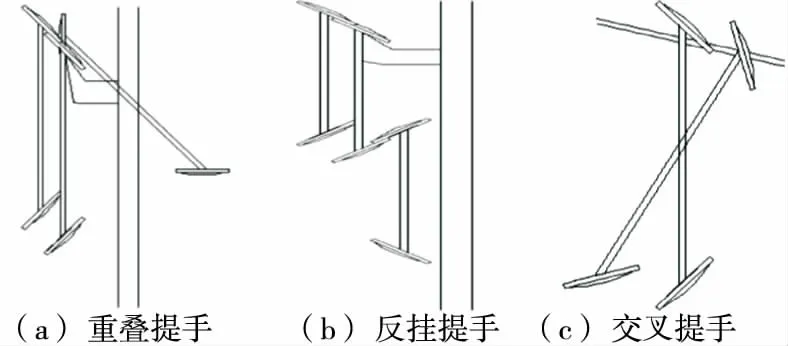
图3 无效提手示意图
2 凸轮机构的设计
纸箱提手整理装置凸轮机构根据解析法设计,其基本思路是:根据提手挂杆的空间布局以及提手剔除推杆作用的位置,确定了凸轮的基圆半径r0;根据剔除推杆剔除次数和距离的要求,确定凸轮的轮廓曲线[7]。
2.1 基本参数的确定
根据纸箱提手整理装置凸轮机构的3次剔除工作要求和配合安装尺寸,计算得出基本设计参数,见表1。
2.2 凸轮轮廓曲线的设计
从动件的运动规律是凸轮轮廓曲线设计的核心要素,因此要想得到符合运动要求的轮廓曲线,准确选择从动件的运动规律至关重要[8]。纸箱提手整理装置的提手挂杆和提手推杆的运动状态为低速轻载,除此之外,速度在从动件运动规律的选择过程中也是需要考虑的要素[9]。
由于提手剔除推杆需要冲击作用才会达到很好的剔除效果,文中从动件运动规律拟采用二次多项式运动规律,在凸轮的推程、回程阶段发生瞬间的刚性冲击,二次多项式的运动规律速度变化曲线是连续的,没有间断点,存在加速度的突变现象,从动件的惯性力也因此发生突变,能够达到推杆的剔除效果。
2.3 各区段轮廓曲线的设计
BC段、CD段和DA段,根据从动件在实际剔除过程中,需要一定的冲击,因此选择从动件的运动规律符合二次多项式运动规律,其位移和速度曲线如图4所示,根据运动过程划分为第1次剔除加速段和减速段,第2次剔除加速段和减速段,第3次剔除加速段和减速段。

1. 第1次剔除段 2. 第1次剔除段 3. 第1次剔除段 4. 提手挂取段
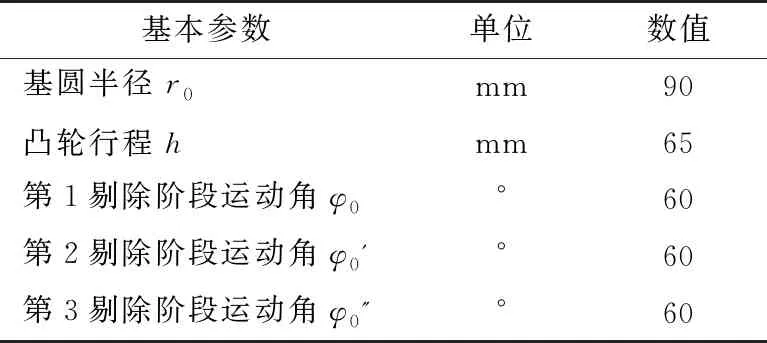
表1 凸轮基本设计参数
第1次剔除加速段:
(1)
第1次剔除减速段:
(2)
第2次剔除加速段:
(3)
第2次剔除减速段:
(4)
第3次剔除加速段:
(5)
第3次剔除减速段:
(6)
式中:
h——凸轮行程,mm;
s——从动件位移,mm;
v——从动件速度,mm/s;
a——从动件加速度,mm/s2;
ω1——凸轮角速度,rad/s;
φ——凸轮转角,°;
φ0——第1剔除阶段运动角,°;
φ0'——第2剔除阶段运动角,°;
根据研究的需要,使用计算机网络进行文献检索和相关资料的收集整理工作,认真并且详细查阅关于大学生足球运动开展状况一些文献资料、论文和期刊30余篇,并通过对长春市图书馆、吉林体育学院图书馆查阅的相关资料信息进行分析和研究,为本文的研究奠定了科学依据和理论基础.
φ0''——第3剔除阶段运动角,°。
3 凸轮机构的运动仿真与分析
根据凸轮基圆半径、凸轮行程以及各剔除阶段的工作角度,在SolidWorks 2016中建立纸箱提手整理装置的凸轮模型。将模型导入ADAMS机械系统动力学自动分析软件中[10-11],如图5所示,通过运动学仿真验证所设计凸轮是否满足工作要求。
在ADAMS中,添加运动副和驱动,设置仿真时长和步长等参数,运行仿真,通过后处理得出从动件的速度和位移曲线[12],如图6、7所示。
通过仿真曲线可知:从动件从B点开始运动到A点的过程中,导杆从动件行程为65 mm,符合设计要求。凸轮从B点顺时针运动到C点,从动件先完成从静止状态到轮廓曲线最低点的运动,此时从动件带动提手剔除推杆完成第1次剔除动作,随后从动件从最低点回到初始高度,到达C位置,从C位置到D位置从动件完成第2次剔除运动,D到A位置从动件完成第3次剔除运动回到初始状态。

1. 凸轮 2. 导杆

图6 导杆从动件速度曲线

图7 导杆从动件位移曲线
由速度曲线可知:凸轮在从B点到A点的运动过程中,速度在尖点位置C、D、A处会发生突变现象,速度冲击带动从动件对提手进行快速的剔除运动,符合提手剔除整理装置的工作要求和性能要求。
4 凸轮的静应力分析
4.1 应用材料及网格划分
运行结果的准确性和网格的划分密度密不可分,网格划分的大小对求解时间有直接影响,算例采用中等密度划分即可,通过“生成网格”命令,对软件默认的网格划分密度保持不变。
4.2 静力学分析
单击外部载荷下的力选项,选择整个凸轮轮廓曲线工作面,根据从动件作用力要求,将导杆从动件计算分析作用力设定为100 N,点击运行按钮,求解出凸轮的应力应变图解如图8所示。结果表明,最大应力为38.5 MPa,所选合金钢材料能够完全满足提手剔除运动要求。
5 样机试验
5.1 试验材料与方法
型号为TS-1515J塑料零散提手600支,桂林艺宇印刷包装有限公司纸箱提手安装设备试验样机。将零散提手随机放入提手料箱,运行试验样机,记录挂杆挂取数量以及倒挂和重叠等不合格提手数量,提手经剔除推杆剔除后,记录提手剔除数量。试验运行5次,记录试验结果[14]。
5.2 试验结果与分析
经试验,纸箱提手整理装置能够正常完成提手的挂取、剔除动作,提手剔除装置运行正常,记录试验结果(如表2)单根提手挂杆平均挂取提手20根,剔除装置平均有效剔除率83.6%,试验结果满足设计目标。

图8 凸轮的应力应变图

表2 纸箱提手整理装置台架试验结果
6 结论
(1) 设计了纸箱提手整理装置,通过解析法对整理装置的凸轮机构进行设计,导杆从动件采用二次多项式运动规律,得出凸轮轮廓曲线。对凸轮机构进行了运动学仿真,得出位移曲线和速度曲线,符合设计要求。对凸轮轮廓曲线工作面进行静力学分析,得到最大应力是38.5 MPa,满足工作要求。
(2) 台架试验证明纸箱提手整理装置能够实现零散提手的自动挂取和剔除,解决了零散塑料提手整理的难题,单根提手挂杆平均挂取提手20根,剔除装置平均有效剔除率83.6%,试验结果符合预期。
(3) 对纸箱提手整理装置凸轮轮廓曲线有待进一步优化,对剔除推杆在不同作用角度下对提手剔除效果的影响有待进一步研究,以提升纸箱提手整理装置的整机性能。
