基于CPG和模糊控制的机器鱼定向游动精确控制方法
2021-03-10和岩辉王朝晖陈振汉李怡昕
和岩辉, 胡 桥,2,3, 王朝晖,2,3, 余 雷 , 陈振汉, 李怡昕
基于CPG和模糊控制的机器鱼定向游动精确控制方法
和岩辉1, 胡 桥1,2,3, 王朝晖1,2,3, 余 雷1, 陈振汉1, 李怡昕1
(1. 西安交通大学 机械工程学院, 陕西 西安, 710049; 2. 西安交通大学 机械制造系统工程国家重点试验室, 陕西 西安, 710049; 3. 西安交通大学 陕西省智能机器人重点试验室, 陕西 西安, 710049)
机器鱼在水下执行探测等作业任务时, 其游动方向的精准性会受到波浪、漩涡等因素的影响, 致使其无法完成相应任务。为解决机器鱼游动方向的精准性问题, 文中基于中枢模式发生器(CPG)理论结合模糊控制器提出了一种可以实现仿鲹科机器鱼定向游动的精确控制方法。首先利用Hopf振荡器构建基于极限环的机器鱼CPG模型, 在机器鱼游动前期, 采用小摆幅高频率的CPG控制信号以获得较大推进力, 后期则采取大摆幅低频率的CPG信号实现稳定游动; 然后, 根据姿态传感器获取机器鱼的航姿角度信息, 利用模糊控制器实时修正机器鱼与目标方向的偏差。通过机器鱼的定向游动及抗干扰试验, 验证了该方法的可行性和有效性, 表明其在机器鱼进行复杂环境下精准方向游动中具有广阔的应用前景。
机器鱼; 中枢模式发生器; 模糊控制; 定向游动; 精确控制
0 引言
可执行多种水下任务的仿生机器鱼在海洋开发与探索中具有不可估量的应用价值, 随着成本的降低和技术的成熟, 将会有更广阔的应用前景[1-4]。机器鱼在水下的工作环境复杂难测, 波浪、旋涡等都会影响其游动方向的精准性。为保证机器鱼在水下执行任务过程中可以准确、高效地完成任务, 根据其位姿信息实现对机器鱼游动方向的精准控制迫在眉睫[5]。在机器鱼的运动控制方面, 各国学者均开展了诸多研究。Shi 等[6]提出了一种基于中枢模式发生器(central pattern generator,)的运动控制模型, 并利用MATLAB对机器鱼的多模态运动进行动力学仿真, 实现了机器鱼不同模态的切换。Yang等[7]通过对自推进仿生机器鱼的可操纵性进行研究, 提出了反馈控制器和前馈补偿器, 使得机器鱼在对抗外部干扰时具有更强的鲁棒性。Hu等[8]设计了一种模仿鲈行式鱼类的高机动性机器鱼, 整个控制系统由2个单向耦合的Hopf振荡器构成, 试验显示当尾鳍摆动频率达到2.8 Hz时, 直线游动速度可达2.0 m/s, 且机动性较好, 易进行机动转弯控制。Tangorra等[9]以蓝鳃太阳鱼为仿生对象, 设计了多鳍机器鱼, 可用来感知水动力流场, 并且含有模仿鱼类前庭系统的姿态传感器。中科院自动化研究所研究团队[10]基于Hopf神经元振荡器提出了一种改进CPG模型, 各关节采用最近相邻耦合方式, 利用仿鲹科鱼以及花斑狗鱼进行了控制算法验证。北京航空航天大学研究团队[11]研制出仿生机器鱼样机SPC-II, 成功参与郑成功古船遗址考察工作, 同时也对两关节机器鱼SPC-Ⅲ的推进与机动性展开研究。北京大学研究团队[12]以仿生箱鲀鱼为研究基础, 对机器鱼的侧线控制系统展开研究。除此以外, 国内的哈尔滨工程大学、北京理工大学、哈尔滨工业大学以及南京航空航天大学均针对机器鱼的运动控制展开过相关研究。已有研究针对机器鱼的运动控制方法基本都是开环控制, 无法保证机器鱼在执行任务过程中方向的准确性。
围绕现有方法中机器鱼在干扰条件下易偏离目标方向的问题, 以机器鱼的精确定向游动为研究目标, 基于CPG理论结合模糊控制器提出了一种可以实现仿鲹科机器鱼定向游动的控制方法, 该方法通过采集机器鱼的角度信息并实时修正与目标角度的偏差, 从而保证机器鱼游动方向的精准性, 最后通过试验平台验证了该方法的可行性和有效性。
1 机器鱼本体设计
图1为文中所采用的仿鲹科机器鱼设计图。机器鱼头部是其游动过程中阻力的主要承受部分, 主要用来安装摄像模块以及激光传感器; 鱼体躯干用来实现头部与尾部舵机的连接, 并为电池能源和控制硬件部分等提供安装空间; 其尾部采用三关节的舵机驱动方式。机器鱼设计参数如表1所示。

图1 机器鱼设计图
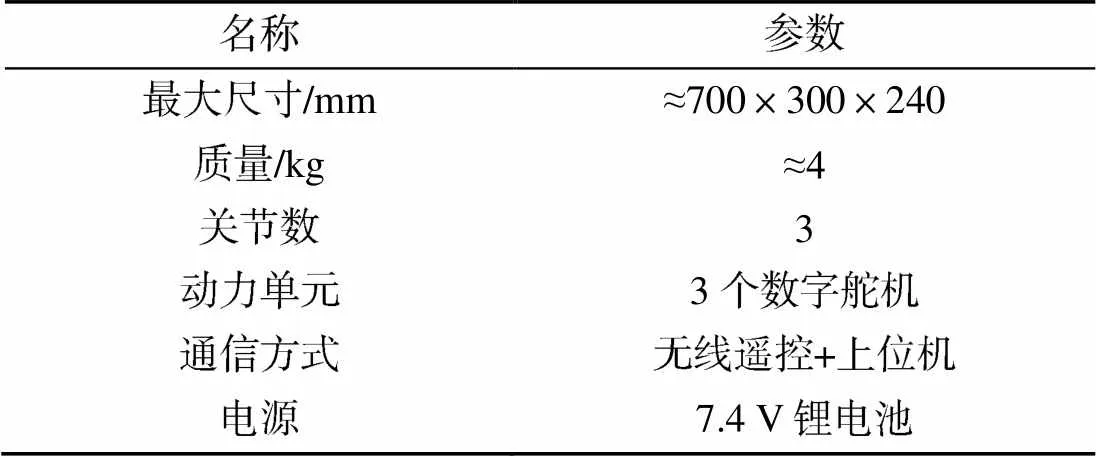
表1 机器鱼设计参数
2 机器鱼CPG模型与运动控制
2.1 模型建立
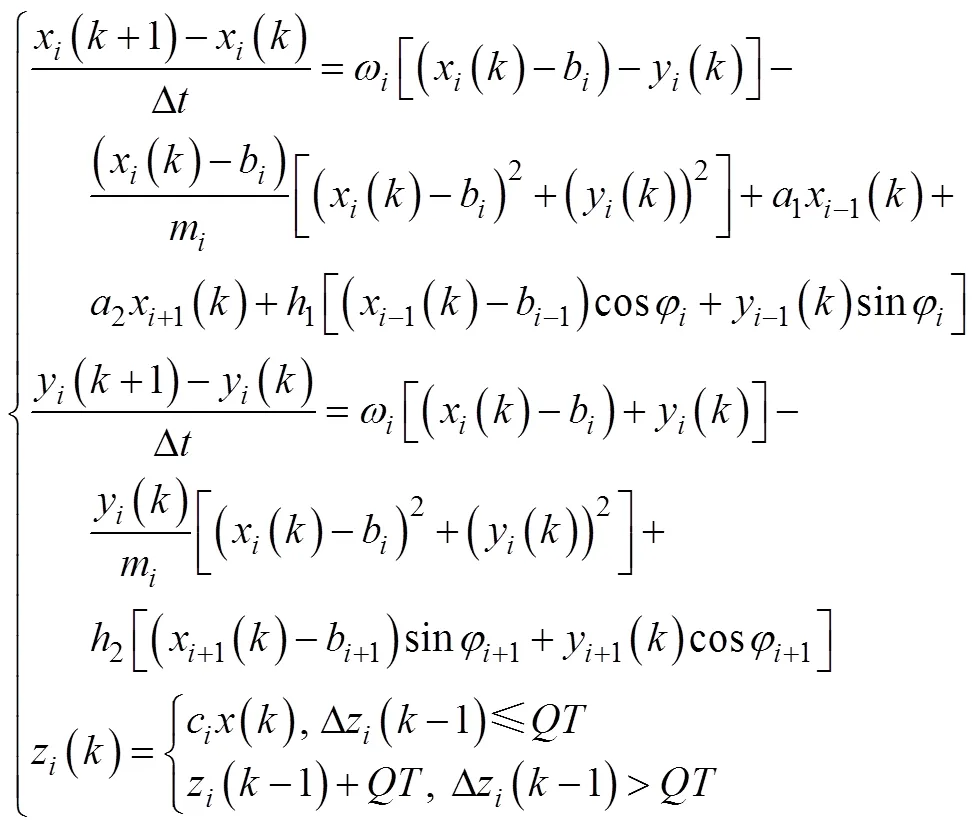
综合考虑各个神经元模型的数学方程以及仿鲹科鱼类的运动特点, 利用Hopf振荡器构建基于极限环的CPG模型[13-14], 通过构造双边扰动信号, 引入振荡单元的相位耦合因子, 实现基于Hopf振荡器的相位自由控制, 得到改进后的CPG模型为




图2 CPG网络拓扑图
2.2 运动仿真

图3为向前直游时各CPG单元的输出信号仿真图。通过图3可以发现, 当机器鱼向前游动时,幅值依次增大, 相位依次滞后, 机器鱼实现前游。
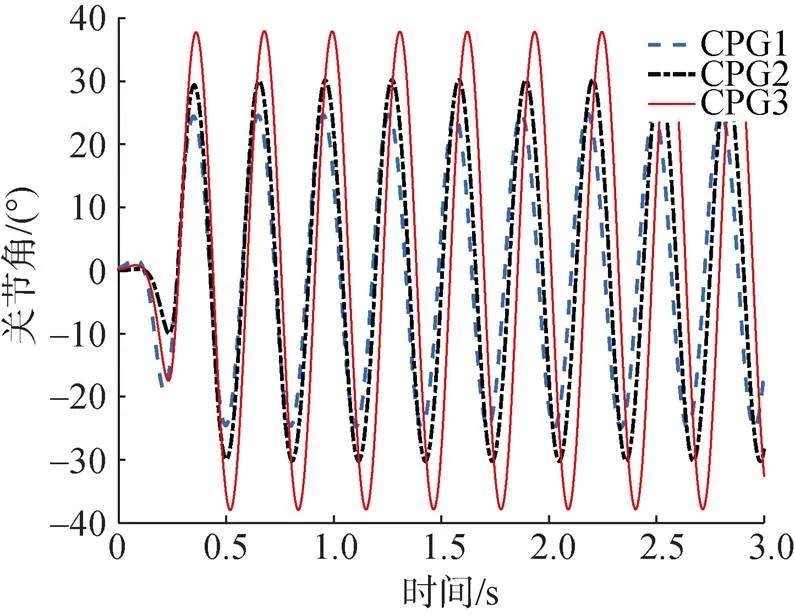
图3 向前直游CPG信号输出图

2.3 定向游动算法设计


图4 左转弯CPG信号输出图



为了提高算法的运算效率, 隶属度函数选择为三角函数和函数, 如图6~图8所示。

图5 机器鱼模糊控制结构框图

图6 的隶属度函数

图7 的隶属度函数

图8 的隶属度函数
模糊控制器的输入和输出论域控制在[–1,1]内, 通过输入及输出的比例因子实现变换, 其中




表2 模糊控制器规则库
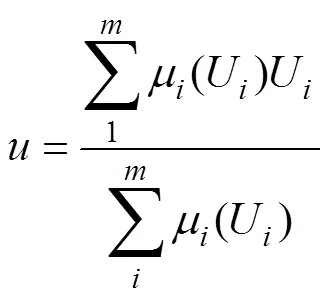
在解模糊时, 推理方式采用Mamdani类型, 输出量的去模糊选择重心法, 即
2.4 定向游动算法仿真验证

定向转弯试验中当目标角度为45°和60°时, 对应的阶跃响应上升时间分别为1.83 s和3.42 s, 调整时间为3.57 s和6.83 s, 超调量为11.23%和16.65%, 之所以出现差异是因为目标角度的增加需要更长的上升时间和调整时间。当目标角度受到干扰力矩的作用后, 会偏离当前角度, 但由于算法的稳定性, 会不断减小角度偏差与变化率, 当目标角度分别为45°和60°时, 对应的波动范围分别为44.01°~53.49°以及58.73°~66.97°。

图9 定向转弯仿真

图10 抗干扰仿真

表3 定向转弯仿真数据汇总
综上所述, 在设计的定向转弯闭环控制器作用下, 目标角度值具有较小的波动, 受到干扰后能够快速恢复到目标角度, 从而保证转弯的精确性和抗干扰性能。
3 试验分析与算法验证
机器鱼的定向游动试验主要用于验证其是否可以根据当前传感器返回的位姿信息来实时调整运动状态, 主要包括定向转弯试验以及抗干扰试验两部分。机器鱼水下探测系统由机器鱼本体、上位机、控制手柄、数据接收器及无线收发装置等组成, 完整的探测系统如图11所示。为了验证定向游动算法的有效性, 仿生机器鱼试验水池的长×宽×高为1.8 m×1.2 m×0.8 m, 机器鱼在试验水池中的游动情形如图12所示。

图11 机器鱼水下探测系统

图12 机器鱼游动图
3.1 定向转弯试验
定向转弯试验的目的是为了验证机器鱼闭环算法的有效性。在定向转弯试验中, 首先将机器鱼当前位置的角度设为0°, 然后完成固定角度的转弯运动, 其中转向角度分别为45°、60°和90°, 所用姿态传感器的最小精度为0.01°, 每隔0.01 s采集一次角度数据。定向转弯试验的角度变化情况如图13所示。定向转弯中的航向角具体数据信息见表4。

表4 航向角数据
通过对上图进行分析可以发现, 当目标角度为45°时, 稳定后的航向角主要在±1.61°范围内波动; 当目标角度为60°时, 稳定后的航向角主要在±2.09°范围内波动; 当目标角度为90°时, 稳定后的航向角主要在±2.53°范围内波动。机器鱼游动稳定后最终角度在一定范围内波动的原因是由于仿生机器鱼受到游动过程中水池壁反射水波和鱼尾摆动产生卡门涡街(旋涡)的相互作用。

图13 定向转弯试验的角度变化
定向转弯试验的角速度变化情况如图14所示。角速度具体数据信息见表5。当目标角度分别为45°、60°和90°时, 机器鱼转弯的最大角速度为80(°)/s, 远低于真实鱼类转弯过程中的角速度, 这主要是由于机器鱼本身机械结构的刚体限制以及机器鱼游动过程中CPG控制参数选取的不是最优值, 再次表明后续研究中需对转弯过程机器鱼的角速度进行优化的必要性。

表5 角速度数据

图14 定向转弯试验的角速度变化
3.2 抗干扰试验
抗干扰试验的目的是为了验证机器鱼闭环算法的稳定性, 当机器鱼的转向角达到目标角度后, 若此时给机器鱼施加一个干扰力, 观察机器鱼是否可以快速根据当前位姿信息调整转角, 回到目标角度。抗干扰试验的具体实施过程主要分为3组, 当机器鱼的转向角达到期望角度45°、60°和90°后, 在6 s时给仿生机器鱼一个干扰力, 利用位姿传感器记录机器鱼的航向数据, 总采样时间为12 s, 机器鱼定向转弯过程中的抗干扰试验如图15所示, 抗干扰试验数据如表6所示。
在3组抗干扰试验中, 当机器鱼受到外力干扰后, 航向角偏离目标角度, 随后机器鱼可以迅速通过尾部的摆动调整当前位姿, 快速回到目标角度, 验证了闭环转向算法的稳定性。在45°、60°和90°定向转弯抗干扰试验中, 受到干扰后机器鱼的最大航向角分别为60.03°、71.71°和117.34°, 从受到干扰到恢复目标角度所用的时间分别为1.48 s、1.93 s和2.37 s, 偏差角越大, 恢复目标角度所用的时间越长。

表6 抗干扰数据

图15 定向转弯过程中的抗干扰试验
4 结束语
为解决机器鱼游动方向的精准性问题, 基于CPG理论结合模糊控制器提出了一种实现仿鲹科机器鱼定向游动的控制方法, 并进行了试验验证。试验结果表明: 当目标角度分别为45°、60°和90°时, 稳定后的航向角在±1.61°、±2.09°和±2.53°范围内波动, 验证了该算法的可行性和有效性; 当机器鱼受到外力干扰后, 从受到干扰到恢复目标角度所用的时间分别为1.48 s、1.93 s和2.37 s, 验证了该算法的稳定性。文中所提方法在机器鱼进行复杂环境下精准游动中具有广阔的应用前景。
[1] 范增, 王扬威, 刘凯. 仿生机器鱼胸鳍波动与摆动融合推进机制建模及实验研究[J]. 水下无人系统学报, 2019, 27(2): 166-173.
Fan Zeng, Wang Yang-wei, Liu Kai. Modeling and Experimental Research of Integrating Propulsion Mechanism of Pectoral Fin’s Fluctuation and Swing for the Biomimetic Robotic Fish[J]. Journal of Unmanned Undersea Systems, 2019, 27(2): 166-173.
[2] Yu J, Li X, Pang L, et al. Design and Attitude Control of a Novel Robotic Jellyfish Capable of 3D Motion[J]. Science China Information Sciences, 2019, 62(9): 182-184.
[3] Yu J, Wu Z, Wang M, et al. CPG Network Optimization for a Biomimetic Robotic Fish via PSO[J]. Neural Networks and Learning Systems, IEEE Transactions on, 2016, 27(9): 1962-1968.
[4] Cao Y, Lu Y, Cai Y, et al. CPG-fuzzy-based Control of a Cownose-ray-like Fish Robot[J]. Industrial Robot: An International Journal, 2019, 46(6): 779-791.
[5] Yu J, Tan M. Leaping Control of Self-propelled Robotic Dolphin[M]//Motion Control of Biomimetic Swimming Robots. New York: Springer, 2020.
[6] Shi R, Zhang X, Tian Y, et al. A CPG-based Control Method for the Rolling Locomotion of a Desert Spider[C]//Advanced Robotics & Its Social Impacts. Shanghai, China: IEEE, 2016.
[7] Yang Y, Wang J, Wu Z, et al. Fault-Tolerant Control of a CPG-Governed Robotic Fish[J]. Engineering: English, 2018, 4(6): 861-868.
[8] Hu Y, Zhang S, Liang J, et al. Development and CPG-based Control of a Biomimetic Robotic Fish with Advanced Underwater Mobility[C]//IEEE International Conference on Robotics and Automation. Hong Kong, China: IEEE, 2014: 813-818.
[9] Tangorra J L, Mignano A P, Carryon G N, et al. Biologically Derived Models of the Sunfish for Experimental Investigations of Multi-fin Swimming[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco, USA: IEEE, 2011: 580-587.
[10] Yu J, Wang M, Dong H, et al. Motion Control and Motion Coordination of Bionic Robotic Fish: A Review[J]. Journal of Bionic Engineering, 2018, 15(4): 579-598.
[11] Huang J, Gong X, Wang Z, et al. The Kinematics Analysis of Webbed Feet during Cormorants’ Swimming[C]//2018 IEEE International Conference on Robotics and Biomimetics (ROBIO). Qingdao, China: IEEE, 2018: 256-263.
[12] Zheng X, Wang C, Fan R, et al. Artificial Lateral Line Based Local Sensing between Two Adjacent Robotic Fish[J]. Bioinspiration & Biomimetics, 2017, 13(1): 326-334.
[13] Prasad M P R, Aminur A M R B. Development of Controller for Robotic Fish[M]//Lecture Notes in Civil Engineering. New York: Springer, 2019.
[14] Bonnet F, Mondada F. FishBot, the Fast Miniature Wheeled Mobile Robot[M]//Springer Tracts in Advanced Robotics. New York: Springer, 2019.
[15] Xia X, Li T. A Fuzzy Control Model Based on BP Neural Network Arithmetic for Optimal Control of Smart CityFacilities[J]. Personal and Ubiquitous Computing, 2019, 23(3-4): 453-463.
[16] Dourado A D P, Lobato F S, Cavalini A A, et al. Fuzzy Reliability-Based Optimization for Engineering System Design[J]. International Journal of Fuzzy Systems, 2019, 21: 33-34.
[17] Zhou Z J, Wang X S, Wang Y. Spacecraft Attitude Control Based on Fuzzy Adaptive Algorithm[J]. Dianji Yu Kongzhi Xuebao/Electric Machines & Control, 2019, 23(2): 123-128.
Precise Control Method for Directional Swimming of a Robotic Fish Based on CPG and Fuzzy Control
HE Yan-hui1, HU Qiao1,2,3, WANG Chao-hui1,2,3, YU Lei1, CHEN Zhen-han1, LI Yi-xin1
(1. School of Mechanical Engineering, Xi’an Jiao Tong University, Xi’an 710049, China; 2. State Key Laboratory of Manufacturing Systems Engineering, Xi’an Jiao Tong University, Xi’an 710049, China; 3. Shaanxi Key Laboratory of Intelligent Robots, Xi’an Jiao Tong University, Xi’an 710049, China)
Robotic fish detection under water, waves, vortices, etc. can affect the accuracy of the swimming direction of a robotic fish, making it virtually for corresponding tasks to be completed. To solve the problem of ensuring the accuracy of the swimming direction of robotic fish, this study proposes an accurate control method based on the central pattern generator(CPG) theory and fuzzy controller. The proposed method can realize the directional swimming of a robotic fish of the genus Plover. In this method, a Hopf oscillator is used to build a CPG model of a robotic fish based on a limit cycle. In the early stage of robotic fish swimming, a small swing high-frequency CPG control signal is used to obtain a large propulsion force, and a large swing low-frequency CPG signal realizes stable swimming. Then, the attitude angle information of the robotic fish is obtained based on an attitude sensor, and the deviation of the robotic fish from the target direction is corrected in real time using the fuzzy controller. Finally, directional swimming and anti-interference experiments of the robotic fish are conducted to verify the feasibility and effectiveness of the precise directional swimming method. Results show that the proposed method has broad application prospects for precise directional swimming of robotic fish in complex environments.
robotic fish; central pattern generator; fuzzy control; directional swimming; precise control
TP242; TP273.4
A
2096-3920(2021)02-0039-09
10.11993/j.issn.2096-3920.2021.01.006
和岩辉, 胡桥, 王朝晖, 等. 基于CPG和模糊控制的机器鱼定向游动精确控制方法[J]. 水下无人系统学报, 2021, 29(1): 39-47.
2020-03-31;
2020-05-18.
国家自然科学基金重大项目(61890961); 装备预研领域基金项目(61404160503, 61402070304); 陕西省重点研发计划重点项目资助(2018ZDXM-GY-111).
和岩辉(1995-), 男, 在读硕士, 研究方向为水下仿生机器人控制技术.
(责任编辑: 许 妍)
