基于图像处理技术的锥形混凝土电杆开裂检验稍端偏转量测量仪
2021-03-10郑东平赵博瀚董朋举宋景辉
郑东平 赵博瀚 董朋举 宋景辉




摘 要:野外施工过程中,锥形混凝土电杆开裂检验的抽检需求是目前市场上亟待解决的问题。针对锥形混凝土电杆开裂检验过程中稍端偏转量的采集和提取方式进行了深入分析,研究并设计了基于图像处理技术的稍端偏转量测量仪,该系统主要由线光源、测试箱、图像采集相机、采集板卡、Lora模块、Matlab程序等6部分构成,测试箱中有定位板、幕布、图像采集相机、采集板卡、Lora模块。线光源发出的光在定位板和幕布的作用下,在箱体内形成光斑,通过在对应的检测拉力点采集光斑位置变化量,从而实现快速、准确的锥形混凝土电杆稍端偏转量采集。
关键词:锥形混凝土电杆;稍端偏转量;Matlab线光源
中图分类号:TP391.41;TU757.3 文献标识码:A 文章编号:1003-5168(2021)28-00-05
Abstract: In the process of field construction, the sampling inspection demand for cracking inspection of conical concrete pole is an urgent problem to be solved in the market. In this paper, the acquisition and extraction methods of tip deflection in the cracking inspection of conical concrete pole are deeply analyzed, and a tip deflection measuring instrument based on image processing technology is studied and designed. The system is mainly composed of six parts: linear light source, test box, image acquisition camera, acquisition board, Lora module and matlab program. There are positioning board, curtain, image acquisition camera, acquisition board card and Lora module in the test box. The light emitted by the linear light source forms a light spot in the box under the action of the positioning plate and curtain. The change of the spot position is collected at the corresponding detection tension point, so as to quickly and accurately collect the deflection of the slightly end of the conical concrete pole.
Keywords: conical concrete pole;tip deflection;Matlab linear light source
在锥形混凝土电杆开裂性能检验过程中,通过激光扫描形成光斑,利用高分辨率工业相机采集光斑位置图像,并利用软件计算不同位置之间的距离差值来代换锥形混凝土电杆开裂性能稍端挠度变化量的技术已经顺利实现,并且测量精度也达到《环形混凝土电杆》(GB 4623—2014)中的要求。该技术的应用是在原有测量手段基础上的新突破。
1 原有规定测量方式
锥形混凝土电杆开裂检验按照《环形混凝土电杆》(GB 4623—2014)进行,针对不同型号的锥形混凝土电杆,在固定电杆根部的同时,在稍端递增施加不同额定值的水平拉力,并在相应的拉力值下记录杆体挠度变化值及杆体开裂程度。检验方式采取悬臂式,如图1所示。
按规定内容,检测过程中需要在图1中(b)的a、b两点分别放置一个高精度直线位移测量装置,如自恢复型直线位移传感器,用以采集在稍端受到水平方向拉力时,锥形混凝土电杆根部支点b和紧固点a因为杠杆力的作用造成垫木发生形变而产生的位移量。因为根部固定长度L2与L的比值约为1∶5,所以根部a、b两点的微小位移量会引发稍端近似5倍的位移量。而在稍端总体位移量中减掉这个位移量,才能得到真正的杆体自身挠度变化量。计算公式如下:
式中:αs0为标准检验荷载作用下的杆体自身挠度值,mm;αc为由测量仪器测得稍端任一级荷载的稍端挠度值,mm;αa为由测量仪器测得a点处的变形值,mm;αb为由测量仪器测得b点处的变形值,mm;L為电杆总长度,mm;L2为电杆支点高度,mm[7]。
本文中所讨论的稍端偏转量是指在悬臂式检测锥形混凝土杆体挠度过程中,图1(b)中a、b两点的变形量引起的稍端位置偏转变化量。对应式(1),稍端偏转量的值等于(αa+αb)L/L2-αa。设稍端偏转量等于αd,则式(1)可化为:
2 测量稍端偏转量
2.1 直接获得稍端偏转量
在稍端加载荷载的情况下,计算杆体自身挠度值时,没有将a、b两点之间这一段杆体的挠度变化计算在内。而锥形混凝土电杆最粗的部分就是a、b两点之间这一段,绝大部分挠度变化发生在稍端,而根部这一段的挠度变化可以忽略不计,即可以将a、b两点之间这一段视为刚体。
2.2 激光技术在各种位置测量设备中的广泛使用
激光技术的优点是散射角度小、光强度大、可以切换某一单色光。将激光线光源以垂直于水平面的方向照射至杆体稍端外10 cm(经计算,此处距稍端10 cm的距离不会影响采集精度)处垂直于杆体轴向并水平放置的测试箱上,线光源照射的光斑方向、光斑宽度均能达到实际需求结果,线光源距离杆体稍端外的偏转量测量仪的距离最远可达14 m。而由于普通线光源基本都是高斯光束,在偏转量测量仪幕布上形成的光斑宽度大于20 mm,这会影响测量精度。采用点光源旋转扫描的方式可以获得线光源的光斑效果,经对比实测,幕布上形成的光斑宽度可以降低至8 mm以内,经过图像采集和后期软件修正,可以获得满意的测量效果。
3 稍端偏转量测量仪的应用价值
3.1 稍端偏转量测量仪的应用优势
依照原有规定,需要在紧固点a和支点b处分别设置一个位移变化测量装置。如果采用现有的装置,将直接减少一个采集点,现场布置的难度会降低。稍端偏转量直接通过下位机计算出来,可以减少上位机的运算量,很大程度上降低了上位机软件的开发难度。稍端偏转量测量仪经过验证,测量精度满足相关标准的要求,其在使用时与杆体无接触,相比原有方案减少了根部支点与紧固点两个直线位移传感器对杆体施加的干扰外力,从而更加真实地反映了锥形混凝土电杆稍端挠度。
3.2 稍端偏转量测量仪的适用范围
锥形混凝土电杆的长度有6 m、7 m、8 m、9 m、10 m、11 m、12 m、13 m、15 m、18 m、21 m等11种类型[2]。根据市场调研,目前市场上主要应用的锥形杆长度为10 m、12 m、15 m,市场上90%以上的锥形混凝土电杆都属于这3种长度。而根据不同稍径,3种杆型详细区分共计23种型号。因为小于10 m的锥形杆目前极少生产,而大于15 m的锥形杆往往需要专门定制,所以本次设计的锥形混凝土电杆开裂检验稍端偏转量测量仪主要针对市场流行的10~15 m区间的锥形杆。
4 系统软硬件部分及使用方式
本系统主要由线光源、测试箱与图像处理程序几个部分构成。
4.1 线光源部分
激光线光源发射装置如图2所示。先将电杆固定,并将激光发射装置固定在水泥电杆根部紧固点a和支点b的中心点。打开激光发射装置,并使用竖直光线模式,在竖直光线模式下,光线通过折线孔遮光板的缝隙,在幕布上形成一个光斑。将此光斑效果输入到程序中,即可以得到所需的位置数据。调解激光发射装置3个脚座的高低位置,使得水平指示气泡位于正中心位置,此时光线扫描处于垂直状态;调整激光发射装置的水平旋转旋钮,使线状光斑尽量落在幕布的左侧位置,才不会在稍端施加水平拉力后,造成光斑移出幕布区,导致无法测量。
4.2 测试箱部分
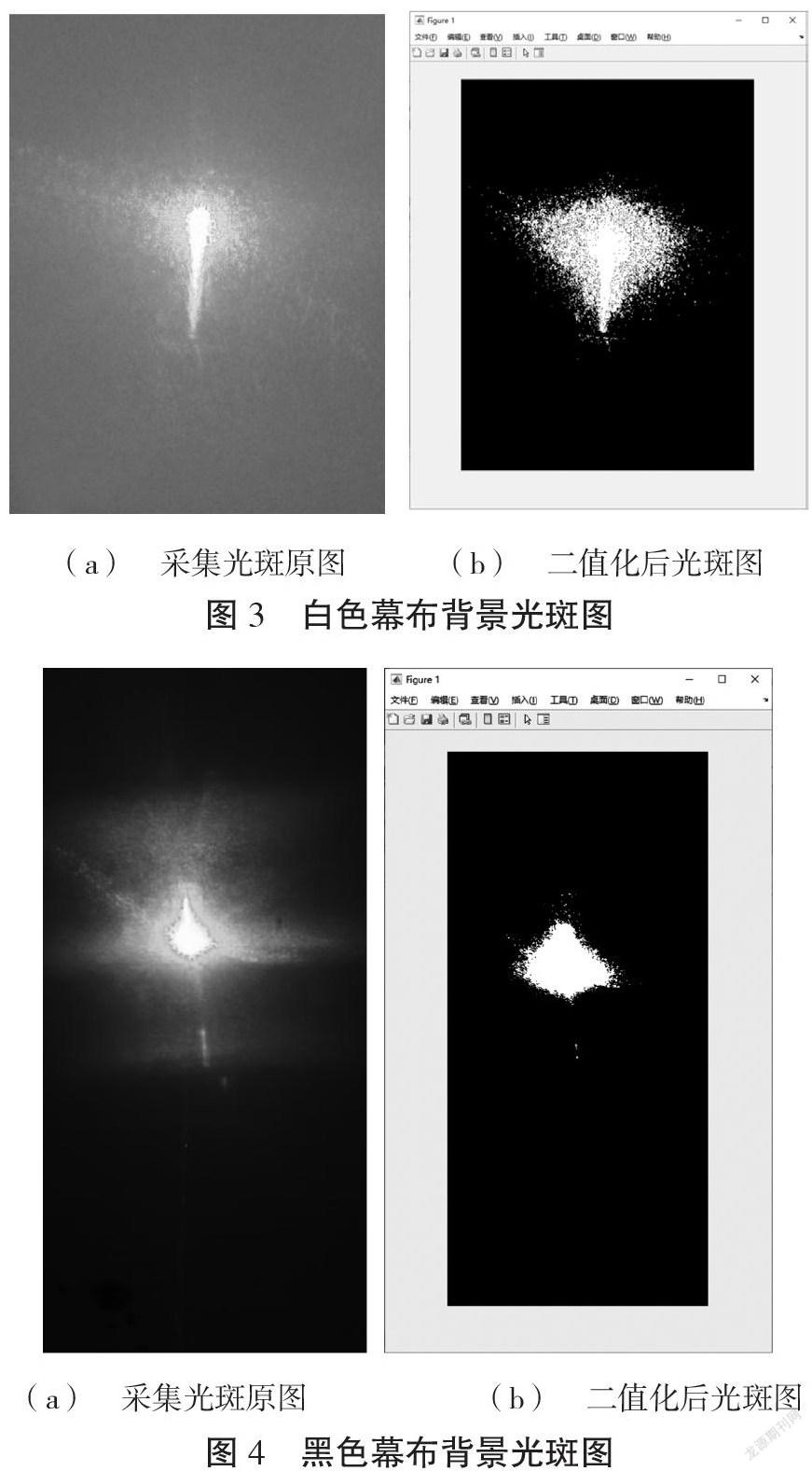
测试箱由幕布、遮光板、工业相机、采集板、无线上传设备组成。光线能够在幕布上形成明显的光斑,便于摄像头拍照采集。选择幕布时,不要选择色调过于明亮的幕布,否则容易在二值化过程时误将幕布某些位置识别为光斑,导致位置信息采集错误。图3、图4是对黑白色背景幕布下采集光斑的对比图。
线光源发出的激光打到测试箱的幕布上,当锥形混凝土电杆进行开裂检验时,稍端受到递增、分段静停的水平方向拉力,受力过程中稍端发生偏转时,激光在幕布上的位置也会发生偏移。通过对比观察,黑色幕布采集的光斑图像更小,更有利于提高计算精度。
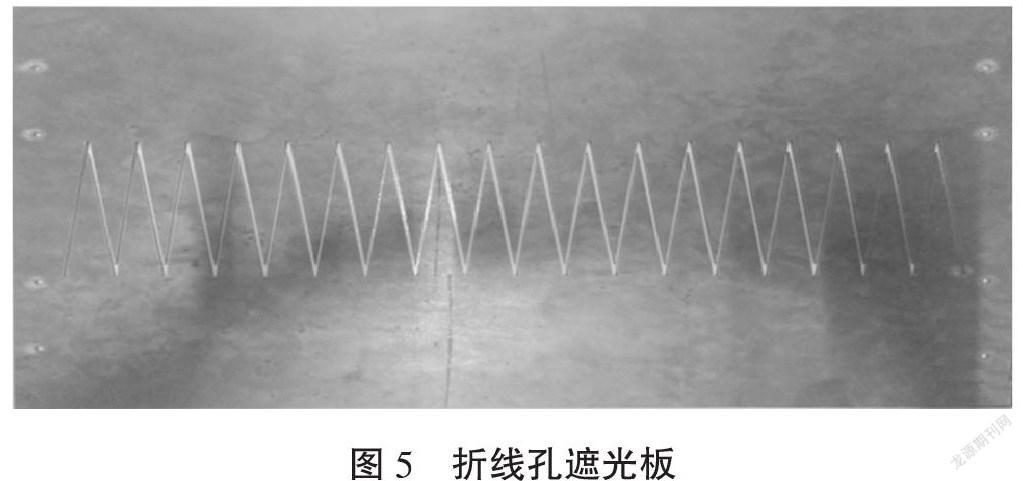
光源照射幕布,其背面的光斑要穿过幕布后面的折线孔遮光板,如图5所示。
光板上开有折线形开孔,开孔的宽度为1 mm。受激光尺的设计原理启发,幕布上形成的垂直方向的线状光斑在透过后面遮光板时,会与折线孔形成交点。由于折线中的每一条斜线的设计高度是100 mm,宽度是10 mm,且在交点处透射到箱体内的光斑高度不同,就可以利用折线的正切值,精准计算出其在水平方向上的分量,从而提高水平方向移动的测量精度。
箱体内采集光斑使用的是高分辨率黑白工业相机,只用于计算光斑几何中心的位置信息,不仅可以保障采集精度,而且降低了采集信息量,有利于提高软件部分运算速度,降低成本。相机采集图像经过现有的集成开发板,计算出现有的光斑几何中心位置与初态光斑几何中心位置之间的水平位置差值,通过无线上传设备将数据上传至上位机进行运算处理。
5 软件部分
5.1 测量流程
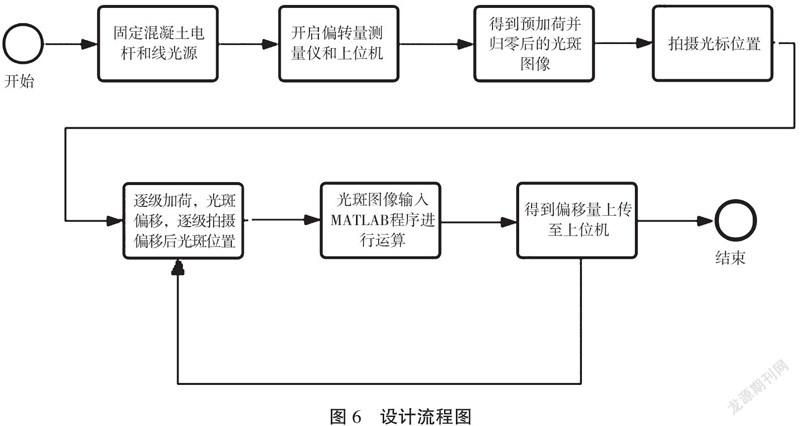
根据有关规定,在开裂检验开始后,加荷40%然后卸荷至0%作为第一次采集点,这个过程叫作预加荷。结束预加荷即可以进行初态采集,采集数据通过软件处理和计算,存入相应的数据库中。之后分别按照出厂检验(出厂检验指最高加荷至国标规定值的100%,经过测试后合格的锥形混凝土电杆,依然可以正常使用)加荷至20%、40%、60%、80%、100%(如进行型式检,还需按国标规定逐级加至满负荷值的200%,这种检验属于破坏性检验,检验过后,可以获得混凝土电杆的更多数据,但混凝土电杆性能已经发生变化,不能正常使用)分别进行拍照和光斑位置计算,与第一次采集的位置数据求差,获得稍端偏转量αd,并上传至上位机进行相应处理。根据上述流程要求,搭建了如图6所示的流程。
5.2 图像二值化处理
进行图片处理的关键是先将图像转换为灰度图像,然后将图片二值化,图片上的每一个像素点的灰度变为0或者255,就可以将整个图像变成黑白图像。但注意要选取适当的阈值,将256个亮度等级的灰度图像转换为能够反映图像整体效果的二值化图像。
5.3 二值化程序
将图像转换为灰度图像后,可以用graythresh等函数来求阈值的分割点,最后再用im2bw函数对图像进行二值化处理[3]。图片二值化的程序如下:
[fn,pn,fi]=uigetfile(‘*.jpg’,’选择图片’);
I=imread([pn fn]);%选择图片(注意,图片格式必须为jpg)
I=im2bw(I);%二值化
figure;
imshow(I);%显示二值化后的图片
去掉转换灰度圖像过程,直接将图片进行二值化,程序如下:
%I=imread(‘1.jpg’);%读图像
%P=rgb2gray(I);%转换为灰度图像
%level=graythresh(P);%求分割阈值
%I=im2bw(P,level);%二值化
%imshow(I);%显示二值化图像
%此段为使用了求分割点的函数
与第一种方法对比发现,此方法占用运行时间,而且对运算结果并无影响。因此选用第一种方法,灰度处理与二值化前后图像对比如图7所示。
5.4 去除噪声
去除噪声是为了将光斑周围的随机误差尽可能地消除。先利用bwlabel函数标注连通区域,再通过regionprops函数找出其中的噪声区域并置零,以此达到去除噪声的目的[4]。
去除噪声程序如下:
L=bwlabel(I);%功能:标注二进制图像已连接的部分。
stats=regionprops(L,{‘Area’,’ConvexHull’,’MajorAxisLength’,’MinorAxisLength’,’Eccentricity’,’Centroid’});%用来度量图像区域属性的函数。测量标注矩阵L中每一个标注区域的一系列属性。L中不同的正整数元素对应不同的区域。
A=[];%定义A为空集
for i=1;length(stats)
A=[A stats(i).Area];%Area是标量,计算出在图像各个区域中像素总个数。
end
[mA,ind]=max(A);
I1=I;
I1(find(L~=ind))=0;
figure;
imshow(I1);
5.5 圆拟合代码过程
temp=stats(ind).ConvexHull;
t=linspace(0,2*pi,500);
c1=stats(ind).Centroid;
% ‘Centroid’是1行ndims(L)列的向量,给出每个区域的重心。注意:Centroid的第一个元素是重心水平坐标(x坐标)、第二个元素是重心垂直坐标(y坐标)。Centroid 所有其他元素则按照维顺序排列[5]。
a1=stats(ind).MajorAxisLength;
% ‘MajorAxisLength’是标量,与区域具有相同标准二阶中心矩的椭圆的长轴长度(像素意义下)。标准二阶中心矩就是标准方差
b1=stats(ind).MinorAxisLength;
% ‘MinorAxisLength’是标量,与区域具有相同标准二阶中心矩的椭圆的短轴长度(像素意义下)[6]。
d1=stats(ind).Eccentricity;
% ‘Eccentricity’ 是标量,与区域具有相同标准二阶中心矩的椭圆的离心率(可作为特征)。
5.6 寻找圆心并计算圆心距离
在拟合圆上任取三个点,通过这三个点确定圆的圆心。圆心一旦确立完成,图像处理就完成了90%,之后再对第二张图片寻找圆心,得到图片中光斑的圆心位置后,计算两个圆心的距离,x与y方向上距离的都要求出并保留。需要注意的是,此时的数值是像素点个数,仍然需要进行换算得到以mm为单位的数值,即所求距离。
5.7 计算圆心之间相距像素数
首先需要说明的是,保留同时计算x与y的坐标,是考虑到可能摄像头拍摄得到的图片是竖直的或者水平的(竖直手机进行拍摄,或者手机水平拍摄两种情况),所以输出的结果可能也会有distance与distance_y两种[1],但是程序并不会对图片的拍摄情况进行分析,所以将两种结果都进行输出,供使用者自行判断。
5.8 像素数转化为距离
摄像头可以在距离幕布20 cm处进行拍摄,或者在定位板与幕布之间紧贴定位板拍摄,只要两张照片拍摄位置固定,而且两张图片上都有光斑即可。像素与距离之间的换算与分辨率有关。
5.9 设计结果分析
输出结果中distance_300数值代表在300 dpi下两张图片上光斑在x方向上位移了多少距离,也就是稍端偏移量,也是通用状态下的输出结果;distance_300_y数值代表在300 dpi下两张图片上光斑在y方向上位移了多少距离。结果显示时的正负号对结果并没有影响,只代表了向左还是向右(x方向上的)。在工作区部分值会被覆盖,不具备太多的参考价值,只需要观察两个圆心的坐标(x0、y0、x_next、y_next)、distance_300、distance_300_y、distance_72、distance_72_y。
6 结语
将激光技术与Matlab软件联合起来,应用到水泥电杆稍端扭转量测量中,得到了测量锥形混凝土电杆开裂检验时稍端偏转量的一个技术新方案。该方案方便现场安装、精度符合国家标准要求,且操作流程对比《环形混凝土电杆》(GB 4623—2014)所规定的流程更加简化。
本系统采用软件与硬件相结合的方式,工作时也可以分开运行,即单独使用硬件组得到图像之后,可以上传并存储起来,软件组可以立即处理,或者之后再次进行多组同时处理,以达到实时性要求。应用Matlab可对图像进行处理并得到准确结果,而且对图像清晰度并没有太高的要求。稍端偏转量测量仪具有实际应用推广价值。
参考文献:
[1]李强.激光光斑中心位置的亚像素定位技术研究[J].量子电子学报,2012(1):58-62.
[2]彭润生.我国水泥电杆的发展趋势[J].广东电力,2003(6):22-24.
[3]薛亚许,李宁.基于MATLAB的指纹图像二值化及细化[J].平顶山学院学报,2012(2):74-76.
[4]白宗文,周美丽.基于matlab的椒盐噪声图像去噪方法研究[J].电子测试,2014(6):27-28.
[5]馬时亮,马群,史国清.基于MATLAB的激光光斑图像处理算法[J].工具技术,2011(8):88-90.
[6]郑三婷.浅谈MATLAB仿真在数字图像处理课程中的应用[J].电子制作,2020(8):62-63.
[7]国家质量监督检验检疫总局,国家标准化管理委员会.环形混凝土电杆:GB 4623—2014[S].北京:中国标准出版社,2015.
3535500338282
