准零刚度振动控制系统的研究进展
2021-03-09吴明亮赵晨名张来喜
吴明亮,赵晨名,张来喜
(兰州理工大学 机电工程学院,甘肃 兰州 730050)
被动振动控制系统结构设计简单、响应快、消耗成本少,是最常见的振动控制方案。
振动控制系统所能处理的振动频率范围,即频带,主要是由系统自身的刚度来决定的。刚度与系统的自然频率存在着比例关系,降低刚度即降低自然频率,从而拓宽了系统所能控制的振动频率范围,进一步降低振动带来的不良影响。
为不断完善振动控制系统,经常用以下两种优化方案来降低系统总刚度:(1)对系统的振动控制结构进行优化设计来减少刚度;(2)并联负刚度结构。经由第一种方案优化的系统,在降低刚度的情况下,将无法保持原有的荷载能力,同时稳定性和空间布置都会受到一定限制。
准零刚度振动控制系统在静平衡位置处的系统动刚度为零,使得系统在具有较低刚度的同时保证了正刚度弹簧原有的荷载能力,很好地处理了低频或超低频振动造成的不良影响。
与传统的被动振动控制系统相比较,准零刚度振动控制系统存在着以下优势:
(1)引入负刚度,使得系统具有非线性项,承载能力较好;
(2)系统总刚度较低,能够处理较宽的振动频带;
(3)正刚度弹簧决定系统承载力,负刚度则用来降低系统的动刚度。通过一定的控制策略,使系统应对不同的外界激励。
本文分析了准零刚度振动控制系统的理论概念、研究现状、结构设计和工程应用等方面的研究进展,研究了该系统在工程应用中的优势和不足,展望了准零刚度振动控制方法的应用前景,为准零刚度振动控制理论的研究和应用提供了一定的参考。
1 基本原理
刚度K的定义为结构所承受的载荷增量ΔF和变形增量Δx之比,是指结构在受外力时抑制变形的能力。刚度K的正负由两个增量的比值决定,当随载荷的增量增加时,ΔF/Δx为正值即为正刚度;反之表示为负刚度。当刚度小于0时,系统处于不稳定状态,从而负刚度结构很少单独应用在实际工程中。正刚度结构与之合理组合配置,将避免系统的总刚度小于0。准零刚度振动控制系统的控制原理如图1所示,系统在承载质量m的作用下,在xe处在静平衡位置。在xe.范围内布置负刚度机构,使得整个控制系统在xe.附近具有准零刚度特性。

图1 准零刚度振动控制系统控制原理
系统的总刚度为K=K++K-。当系统在xQ范围内振动时,调整K+,令K+正向趋近于K-,使得总刚度正方向趋于0,从而降低系统固有频率,优化隔振性能。
2 理论分析的研究现状
1957年,Molyneux[1]通过对正刚度弹性体进行结构优化,使得被动振动控制系统在满足较高承载的同时,拥有较低的系统刚度;1989年,Alabuzhev等[2]较为全面地阐述了准零刚度振动控制系统的相关理论;并设计出多种准零刚度机构实现方案;1995年,彭解华等[3]从正、负刚度结构并联的稳定性角度展开研究,提出此类结构在振动控制中的相关应用;1997年,彭献等[4]首先在国内提出准零刚度隔振器的相关定义,并详细介绍了此类隔振器的分类及设计方法;1999年,Platus等[5]以相互铰接的欧拉压杆为结构基础,设计出可以实现准零刚度特性的隔振器,压杆结构在一定程度上避免了斜置弹簧可能造成的失稳,进一步提高了系统的稳定性;2004年,张建卓等[6]研制了一台正负刚度并联隔振系统,系统较低的总刚度使得自身固有频率降低,频带明显拓宽,隔振性能实现优化。
Carrella等[7-9]对Alabuzhev提出的多种负刚度模型展开进一步研究,提出一种三弹簧结构式准零刚度隔振器,斜置弹簧提供负刚度。基于对隔振器的力传递率的分析,对不同条件下的斜置弹簧的传力能力进行对比;Kovacic等[10]对非对称激励下的隔离器进行动力学分析,量化非线性造成的不良影响,并判断周期加倍分岔的出现或发展为混沌运动的可能性。为了能够求出分岔出现时的频率,团队采用近似分析方法、数值模拟方法以及定性方法,其中包括相平面图、庞加莱图以及李雅普诺夫指数,确定出阻尼对该频率的影响;彭献等[11]对一种准零刚度被动隔振系统的非线性共振响应进行分析,用L-P法,比较系统在主谐波共振、亚谐波共振和超谐波共振三种不同条件下与Duffing系统之间的差异;徐道临等[12]详细研究了幅频与相频特性和位移与力的传递率。此外,对准零刚度振动控制系统的不稳定区域进行分析,并提出优化方案[13];Ye Kan等[14]提出了一种基于准零刚度隔振系统的凸轮-滚子机构,基于滚子-球面结构所具备的良好的定位特性,通过结构优化,使隔振系统能适应不同的载荷;Chai等[15]研究了激励频率、激励幅值以及阻尼比等参数对单自由度和2自由度系统的幅频特性和力传递率的影响;Wang等[16]采用平均法求解各激励频率下准零刚度隔振系统稳态下的非线性动力学方程,并详细讨论了不同激励幅值和阻尼下具有良好隔振性能及稳定性的隔振器刚度设计准则;程春等[17]研究发现载荷与激励幅值的变化对隔振系统的共振频率、传递率峰值以及隔振性能的影响,其中在激励幅值较大时,载荷变化会导致系统响应的常数项在共振范围内出现交叉折叠的现象。
3 结构设计的研究现状
在准零刚度振动控制系统的研究过程中,负刚度的实现是具有准零刚度特性的前提。目前,国内外的科学家们已经实现多种不同形式的负刚度机构,分类如下。
3.1 倾斜弹簧结构提供负刚度
Carrella等提出了一种由垂直弹簧和斜置弹簧并联组成的准零刚度振动控制系统,并分析了结构参数、过载欠载等因素对系统隔振性能的影响;Kovacic、Feng等[18]、Gatti等[19]也分别将3个弹簧进行组合,通过参数分析设计出合适的准零刚度振动控制系统,并进行了一系列的静态和动态分析。
Lan等[20]利用两种平面弹簧取代横向和垂向的螺线弹簧,使整个控制系统可以建立在相对紧凑的空间内,并通过相关实验验证了系统在不同载荷下良好的隔振性能,如图2所示;白晓辉等[21]创新性地将碟形弹簧与线性弹簧并联,得到一种低频隔振器,其中碟形弹簧提供负刚度;孟令帅等[22]同样以碟形弹簧作为负刚度元件,设计出一种新型准零刚度振动控制系统,如图3所示。

图2 含平面弹簧的准零刚度隔振器

图3 碟形弹簧提供负刚度的原理图
然而,提供负刚度的斜置弹簧在变形时可能出现横向失稳现象,为避免这一情况的发生,通常会在弹簧内部安装导向结构,但是这样不仅增加了装配难度,还给整个系统带来了多余的摩擦和阻尼。

图4 屈曲欧拉梁准零刚度隔振器
3.2 压杆结构提供负刚度
张建卓等[23]将受到压弯作用的压杆作为负刚度机构,当压杆两端受到的压力大于临界值时,压杆在中点位置产生负刚度;刘兴天等[24]以屈曲欧拉梁作为负刚度元件,设计了一种准零刚度隔振器,如图4所示;陆纯红等[25]设计了一种以欧拉压杆作为负刚度结构的准零刚度隔振器,并进行了相应的动力学分析;Yang等[26]对此类型的准零刚度隔振系统固有的非线性动力学行为和功率流特性进行了研究;Huang等[27]研究了用欧拉屈曲梁作为负刚度校正器的非线性隔振器的隔振特性。
通过压杆结构提供负刚度,有效改善了弹簧结构可能造成的失稳现象,提高了系统的稳定性。然而,此类结构的负刚度特性受压杆影响较大,在工程应用中较少。

图5 欧拉压杆准零刚度隔振器
3.3 水平弹簧连杆结构提供负刚度
白晓辉等[28]分析并仿真了一种正负刚度并联机构,其中采用两组压缩弹簧与杆件铰接作为负刚度机构,采用铰接杆使得产生负刚度的弹簧仅发生沿水平方向的伸缩,弹簧恢复力的传递更稳定;蓝双等[29]提出一种采用拉伸弹簧的准零刚度隔振系统,如图6所示。并通过相应仿真证明了其相较于压缩式系统的优越性;Thanh等[30]在此基础上,将此类结构的隔振系统应用于汽车座椅,并通过多组实验验证了应用于汽车座椅隔振的良好性能。理论模型如图7所示。
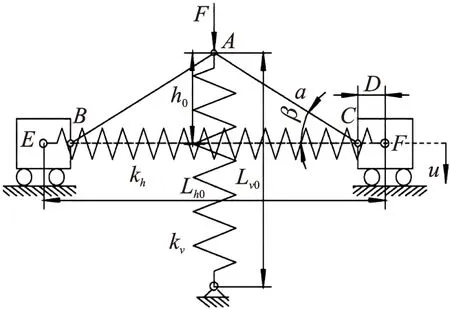
图6 拉伸弹簧式准零刚度隔振系统模型

图7 汽车座椅隔振系统模型
水平弹簧连杆结构与倾斜弹簧结构类似,但是一定程度减轻或避免了弹簧在压缩过程中可能出现的失稳现象。然而,连杆铰接处的摩擦力仍会对系统的动刚度特性造成一定影响。
3.4 磁铁或空气弹簧结构提供负刚度
Carrella等[31]将3个永磁铁有序布置在支撑杆上,结构如图8所示,布置在两端的永磁铁对中间的永磁铁作用,由磁力产生负刚度;赵贺等[32]根据磁悬浮特性和准零刚度原理,设计出准零刚度电磁隔振系统,该系统低频、高频振动条件下,相对于传统的隔振器,隔振效率分别提升了84%和74%;李强等[33]将永磁弹簧和橡胶带组合配置,设计出一种具有准零刚度特性的永磁隔振器。其中橡胶带作为负刚度元件;王迎春等[34]设计了双环永磁体型准零刚度振动控制系统,通过实验与对应的线性振动控制系统进行对比;赵智等[35]利用气动弹簧提供负刚度,设计出气动式准零刚度隔振器,如图9所示。
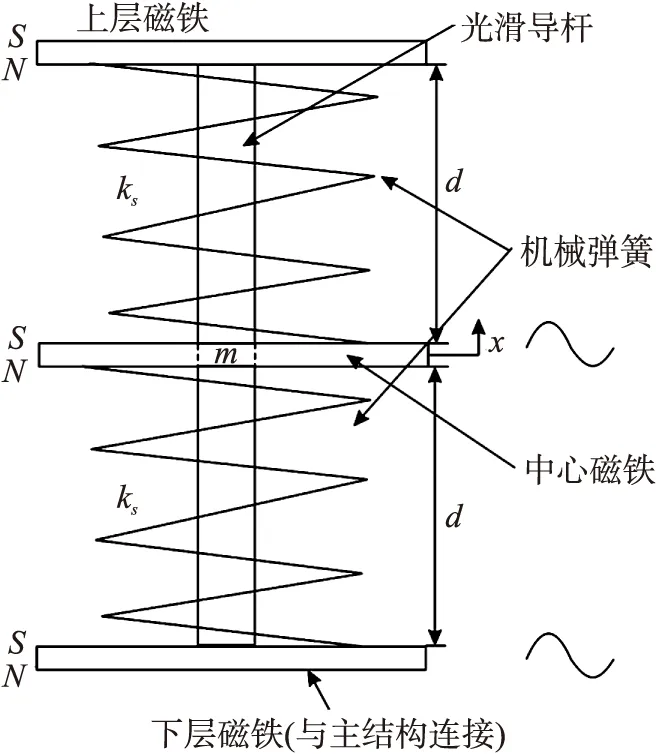
图8 三磁铁负刚度机构模型

图9 气动式准零刚度隔振器
此类型负刚度结构有效避免了摩擦力的产生,并在一定程度上提高负刚度可控性。但是磁铁、空气弹簧会给系统引入电磁影响或额外动力结构,不能符合一些工程应用的简单化需求。
3.5 其他类型
随着对准零刚度研究的深入,除了利用负刚度机构或元件本身具有的负刚度特性以外,有学者建议通过引入主动振动控制进一步提高准零刚度隔振系统的隔振性能。
Thanh等[36]提出了一种基于准零刚度结构的主动气动隔振系统,如图10所示。通过分析系统的时变性和非线性,引入自适应智能后退控制器(AIBC)来管理系统运行,实现更好的隔振性能;Zhou等[37]研制了一种通过机械弹簧与一对电磁弹簧并联而实现准零刚度的振动控制系统,如图11所示,由于电磁弹簧的刚度取决于对电磁铁输入的电流大小,该隔振器可以被动或半主动地进行运转;韩超等[38]结合负刚度技术、电磁技术以及在线控制技术,提出一种可调负刚度的磁齿式电磁负刚度机构,并加入与磁齿式电磁隔振器相匹配的控制器;李东海等[39]在准零刚度隔振系统中引入线性位移时滞控制策略,有效抑制了系统由于非线性造成的跳跃现象和Hopf分叉现象;Sun等[40]提出了一种具有时滞主动控制的多方向准零刚度延迟隔振器,该隔振器可以同时在3个方向上实现良好的隔振效果,并通过结构参数的调整和主动控制,使得隔振器适用于不同工程要求;蒋学争等[41]基于磁流变弹性体实现减振器的主动控制,并通过压电捕获理论,实现减振器的自供电功能。
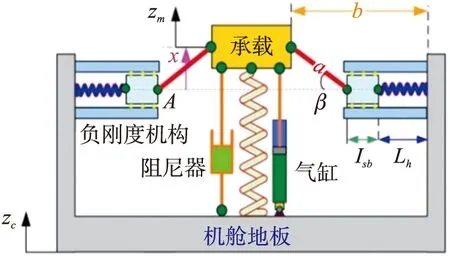
图10 主动气动隔振系统模型

图11 可调式准零刚度隔振器
4 应用
4.1 在车辆或列车中的应用
王勇等[42]基于准零刚度结构建立了8自由度车-座椅-人耦合动力学模型,如图12所示;Thanh等[43]也设计了合适汽车座椅底部的准零刚度振动控制系统,如图13所示;Sun等[44]为了控制铁路车辆的低频振动,提出了一种基于加速度的垂直2自由度低频动力吸振器。针对2自由度动力吸振器所需的低频悬架隔离器,设计了具有准零刚度特征的隔离器。
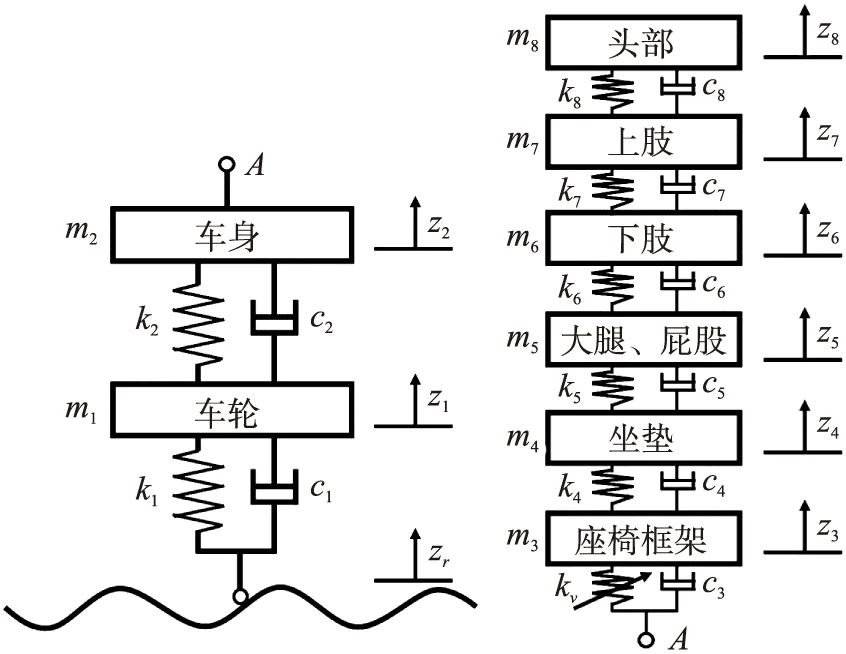
图12 8自由度耦合模型

图13 汽车座椅模型
4.2 精密仪器和特种装备隔振中的应用
赵含等[45]提出将准零刚度隔振器应用于船舶推进轴系中,对比研究了基于准零刚度隔振器模型和等效线性隔振器模型的推进轴系,在叶频激励下的隔振效果;闻荣伟[46]提出了一种应用于大型精密仪器,基于洛伦兹力致动器主动控制负刚度的隔微振控制策略。同时,通过与空气弹簧并联来更进一步降低系统固有频率;吴文江[47]提出了一种正弹簧与负刚度元件并联的新型隔振系统。为了解决高低频隔振性能的矛盾,提出了一种采用天棚阻尼的六自由度隔振系统模态解耦控制方案;为了降低变压器低频振动噪声对小区居民生活的不利影响,刘玉成等[48]基于准零刚度技术设计了可用于变压器减振降噪的准零刚度隔振平台。
4.3 其他应用
Zhou等[49]提出一种适用于转子系统,具有准零刚度特征的扭转隔振器。用以衰减轴系中扭转振动的传递;Li等[50]研究了具有准零刚度特征的12自由度浮筏系统。实验表明,该系统在隔振区的力传递能力优于相应的线性系统;杨国锋等[51]考虑到环境的低频振动对康复机器人性能带来的不良影响,在机器人系统中引入准零刚度振动控制系统,优化了机器人的低频隔振效果。
Sun等[52]设计了以磁体间的相互作用作为局部负刚度元件的连续隔震结构,来改善隔振性能并拓宽隔振带;Zhu等[53]研究了二自由度准零刚度隔振器在抗震工程中的实际应用;Ding等[54]将准零刚度隔振系统应用于管道隔振,对基础激励引起的输液管道横向振动进行衰减,模型如图14所示。
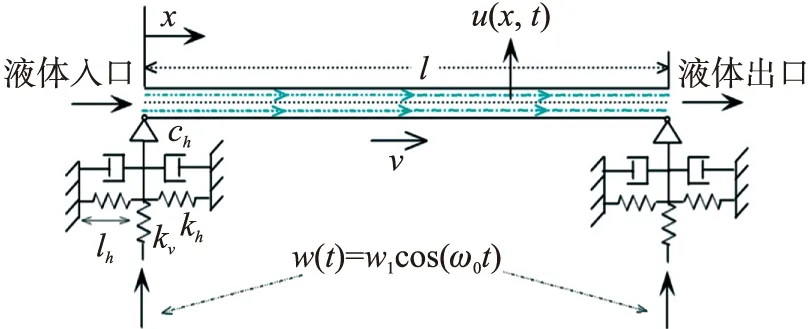
图14 具有准零刚度隔振器的液体输送管道
5 结束语
5.1 目前存在的问题
(1)准零刚度振动控制系统具有较强的非线性特性。当阻尼过小或者外界激励幅值较大时,容易产生跳跃现象(共振峰值过高),将严重影响系统的振动控制效果。
(2)目前关于准零刚度振动控制系统的研究,系统普遍处于额定载荷下,即最小刚度位于静平衡位置。在实际工程中载荷可能发生变化,系统的静平衡位置偏离初始设计位置,会导致系统的刚度关于新的静平衡位置不对称,影响系统的振动控制效果。
(3)主动负刚度具有变化灵活,不受负载变化影响的优势。但其最终性能受到传感器和作动器的动态特性的限制。
5.2 发展前景
(1)磁悬浮隔振现己成为研究热点,它不仅能够实现很低的固有频率,避免接触造成的摩擦,而且相比于传统被动隔振系统,磁悬浮隔振系统的刚度可控性更强。这一技术将进一步提高准零刚度隔振系统的低频振动控制范围,并为设计出适应更低频率的超低频隔振平台创造了可能性。
(2)目前,大多数学者对于准零刚度隔振系统的改进,多以结构优化、引入主动控制为主,而通过改变材料来提高隔振性能却鲜有报道。通过研究领域间的交叉,进一步扩大此类振动控制系统的适用范围。
(3)随着工业的不断发展,大型制造设备在保证生产效率的同时,也需要更进一步处理外界因素对工作质量带来的不良影响。以制孔机器人为例,在工作过程中,为了保证制孔的精度,处理来自工厂环境的不利振动是不可或缺的。目前,常见的隔振方式是通过设置隔振沟来减小环境振动的影响。但由于隔振沟的隔振频带有限,不能很好地处理随机性强、频带宽的工厂环境振动。因此,将制孔机器人引入准零刚度隔振系统,可能是进一步提高工作质量的突破口。
