省级CORS与千寻位置CORS BDS网络RTK精度对比分析
2021-03-07步东亮
步东亮
(宁波冶金勘察设计研究股份有限公司,浙江 宁波 315041)
目前我国的大部分省份均已建立省级连续运行参考站系统(CORS系统),我国第一个CORS系统是2003年原深圳规划与国土资源局建立的SZCORS系统[1]。CORS系统在测绘领域发挥着极大的作用,其中CORS系统提供的多基准站网络RTK服务,与传统RTK相比,基于CORS站的网络RTK效率更高、应用范围更大、初始化速度更快[2-5]。千寻位置已在全国布设大量基准站,主要为用户提供精确的位置服务,省级CORS系统与千寻位置提供的服务中有重叠的部分,两者均能够提供实时北斗网络RTK服务,相对于省级CORS系统千寻位置可以实现全国统一账号,使用更为方便[6]。本文通过对以浙江省CORS系统为例在浙江省境内选取多个已知点对省级CORS与千寻位置两种系统进行精度对比分析。
1 网络RTK工作原理及优势
CORS系统一般分为单基站CORS系统与多基站CORS系统。目前,多基站CORS系统逐渐成为RTK的主流,网络RTK也被称为多基准站RTK,一般是指在某一区域内建立三个或三个以上的GNSS连续运行基站,这些基准站全天候接收GNSS卫星数据,并实时计算出基准站网覆盖范围内的差分改正信息,从而实现流动端的精确定位[7]。
网络RTK系统一般由四部分构成,分别为基准站、数据处理中心、通讯链路、用户。目前最为常用的技术为双差虚拟参考站技术(VRS),即在流动端附近设立一个虚拟的基准站,利用周围的基准站观测数据计算出此虚拟参考站的虚拟观测值,从而与流动站进行双差,实现高精度厘米级定位[8-9]。
网络RTK相对于单基准站RTK及传统RTK,优势主要体现在以下方面:
(1)更高的定位精度及可靠性,网络RTK利用多个基准站对空间相关误差进行估计并对流动端提供差分改正信息,如果某一基准站停止运行,其他基准站的数据可以实时进行数据补偿,保障用户能够继续进行定位。
(2)由于基准站数量增加,且采用网络实时传输差分改正信息,基准站覆盖范围内精度均匀分布,网络RTK的作业范围要远大于单基站RTK。
(3)基于CORS系统的网络RTK在使用过程中,不需要架设本地的基准站,极大程度上降低了时间成本,提高了工作效率。
2 网络RTK数学模型
2.1 伪距/载波相位观测方程
BDS伪距/载波双差观测方程如式(1)和式(2)所示。

(1)
(2)

双差观测方程消除了接收机和卫星的钟差,同时在很大程度上削弱了其它误差的影响。
2.2 扩展的网络RTK卡尔曼滤波模型
目前网络RTK参数估计最常使用的为卡尔曼滤波模型,在我们通过接收机直接接收到的信号中一定存在带有“杂质”的干扰信号,“滤波”就是将这些杂质消除并将有用的数据保留的方法[10]。
Xk=Φk,k-1Xk-1+Wk-1
(3)
Lk=HkXk+Vk
(4)
式中,Vk为k时刻的噪声观测向量;Φk,k-1表示状态转移向量;L为观测量;H为系数矩阵;X为状态向量;W为动态噪声向量。
利用位置均值的自适应算法可以得到状态方程以及观测值方差矩阵:
(5)
Pk/k-1=Φk/k-1Pk-1/k-1Φk/k-1T+Qk-1
(6)

根据卡尔曼滤波模型计算增益矩阵Kk:
Kk=Pk/k-1·HkT·(HkPk/k-1HkT+Rk)-1
(7)
式中,R为观测过程中观测误差的方差阵。
(8)
Pk/k=(I-KK·Hk)·Pk/k-1
(9)
2.3 虚拟观测值生成方法
(10)
式中,φvrs为虚拟载波相位观测值;φmr为主参考站载波相位观测值;ρmr与ρvrs分别为主参考站与虚拟参考站卫地距离。
3 省级CORS与千寻位置网络RTK精度对比
在浙江省内选取2个已知点,坐标系采用2000国家大地坐标系,如图1所示,红色标记为已知点概略位置,所选取的NINGB、JINH两点分别位于浙江省内东北、西南位置。

图1 选点概略位置
实验时间为2020年5月20日和22日,实验设备采用两台同一型号的天宝R8多系统GNSS接收机,将天线连接公分器,再与两台接收机进行连接。两次实验均只使用北斗单系统进行解算,两台接收机分别登陆千寻账号、浙江省CORS账号,同时进行观测,两个点位观测时段均为9:00~10:00,采样间隔为1 s,卫星截止高度角为15°。
NINGB点位省CORS投影后的外符合坐标残差序列图如图2所示,省CORS系统在东、北、高方向精度均达到厘米级精度,高程方向部分残差幅度较大,平面精度相对更稳定。NINGB点位千寻位置CORS投影后的外符合坐标残差序列图如图3所示,千寻位置总体定位与省CORS相当,在第2 078个历元高程方向出现跳点,其它历元坐标残差均小于10 cm。

图2 NINGB点位省CORS坐标残差序列图
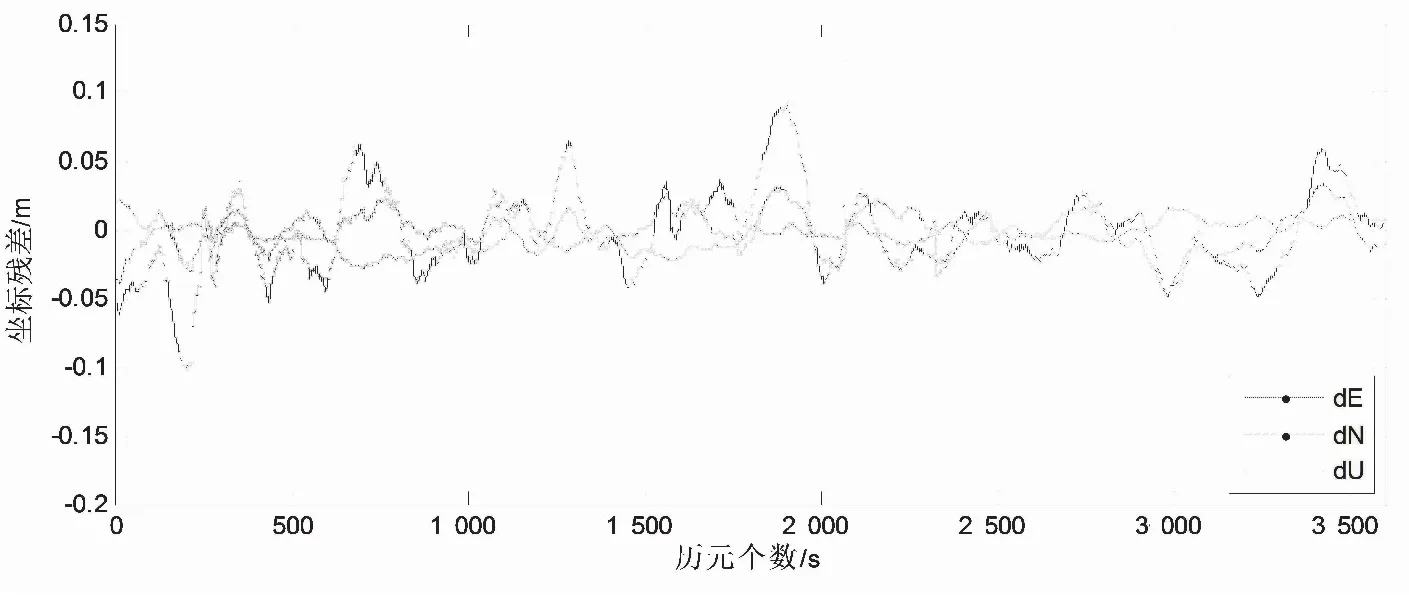
图3 NINGB点位千寻位置坐标残差序列图
JINH点位省CORS投影后的外符合坐标残差序列图如图4所示,省CORS东、北、高三个方向坐标残差均小于0.05 m,但大部分历元存在一定系统性误差。JINH点位千寻位置投影后的外符合坐标残差序列图如图5所示,在第472至643历元之间高方向上出现了明显的系统差,最大定位误差达到了0.093 m,其余历元定位精度相对稳定。

图4 JINH点位省CORS坐标残差序列图
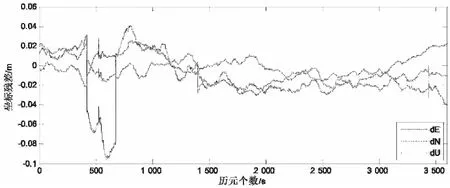
图5 JINH点位千寻位置坐标残差序列图
对NINGB、JINH点位RMS值以及可视卫星数目进行了统计,如表1所示,可以看出省CORS与千寻位置两种系统的定位精度基本相当,东、北方向RMS值均小于0.02 m,高方向RMS值均小于0.04 m。北斗系统平均可视卫星数目均在11颗以上。省CORS与千寻位置初始化时间对比如表2所示,两种系统初始化时间均为1 s。

表1 NINGB、JINH点位RMS值及可视卫星数统计
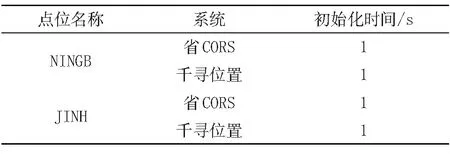
表2 两种系统初始化时间对比
4 结 语
分别在浙江省东北、西南位置选取两个已知点,网络RTK流动端采用同一天线,对省CORS系统与千寻位置系统在定位精度、稳定性等方面进行分析,两种CORS系统单北斗网络RTK定位性能方面基本相当,均能够提供实时快速的厘米级定位服务。