基于PID算法的锂电池恒压夹具系统设计
2021-03-07颜春林
颜春林
(浙江同济科技职业学院 浙江省杭州市 311231)
锂离子电池是20世纪90年代出现的绿色高能环保电池,具有能量密度高、循环寿命长、等突出的优点,是众多电子装置小型轻量化的理想电源,也是未来电动汽车、军用的理想轻型高能动力源。
在锂离子电池制备过程中,第一道重要的工序称为化成,即对注液搁置后的电池进行首次充电,是对锂电池的一个首次活化,并形成固体电解质界面膜(SEI)的过程[1],在锂电池化成过程中影响电池最终性能的一个最重要的因素是恒压因素,经实践证明,锂电池化成过程必须放在一个特定的夹具内,并施予一恒定不变的压力,这样不仅能保证电池正负极界面平整、均匀接触,缩短化成时间,而且还大大的提高电池的化成效果;但是,随着化成充电的进行,电池内部电压升高且伴随气体的产生,电池会膨胀,导致其所受压力升高,产生压力干扰;当电芯表面压力过大时,电极表面的电解液被挤出,离子浓度降低,不利于SEI 膜形成[2]。因此需要保证在化成过程中,如何消除压力扰动,保证压力环境恒定,是当务之急。
针对锂电池化成过程中需要恒定压力的工艺要求以及化成过程产生的压力干扰,本文采取压力传感器和伺服系统相结合方法来构建锂电池化成的恒压夹具系统,并引入PID 控制算法,实时的追踪锂电池化成过程中的压力,并通过压力传感器和伺服控制系统及时的进行修正,从而给锂电池化成提供一个恒定的压力环境。
1 PID控制技术
目前较为成熟的控制理论有PID 控制、BP 神经网络、模糊控制等以及多种算法相融合,不同算法各有优势,方案选取视控制精度要求和控制难度等实际情况而定。其中PID 控制不需要推导和求解电机及传动系统精确的数学模型即可进行有效控制,且鲁棒性较好,因而成为目前实际应用中普遍采用的控制方法[3]。PID 控制器稳定性较高、调试方便和结构简单等优点,当工程技术人员无法准确地得到被控对象的参数数据、控制系统的结构以及参数时,就必须依靠技术人员的经验并通过现场调试来确定时,PID 控制器是最好的选择。具体的PID 控制框图如图1所示,其微分方程可表示为:

式中:u(t)—电机的输入控制信号;Kp—比例系数;e(t)—实际值与给定值的偏差;TI—积分时间常数;TD—微分时间常数,u0—PID 系统输入值。
根据图1 中PID 控制框图可知,当系统的预设值和实时值不相等时,此时偏差e(t)不等于0,PID 控制器将通过比例、积分、微分控制器实时对被控量进行监控,进而驱动执行器进行相应的动作,保持系统稳定,控制器的输出可以看成是三个调节器输出的和[4],通过拉普拉斯变换后,可以得到:
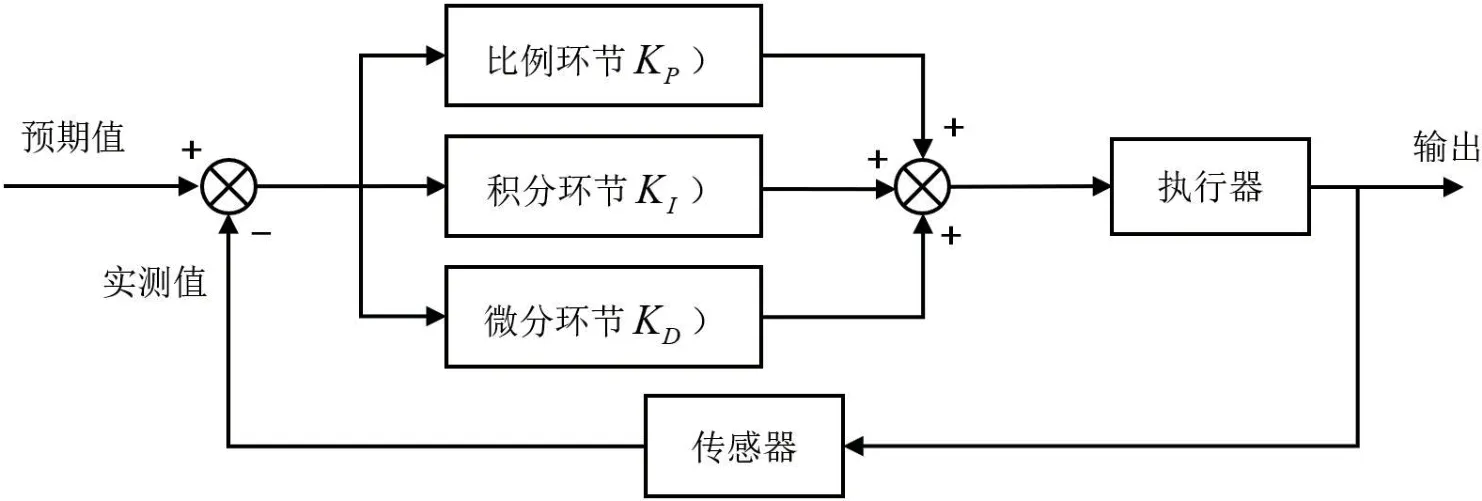
图1:PID 控制框图
比例项输出:

积分项输出:

微分项输出:

经过离散化计算可以得到PID 控制在某一采样时刻输出可表示为:

式中:u(n)—当前输出的控制变量;u0—PID 系统输入值。
本次设计的被控对象为压力信号,执行器采用伺服传动方式。电池化成系统在收到化成命令后,伺服电机带动夹具压紧电池,压力传感器实时采集夹具的压力值,在此过程中有两个环节会出现压力的波动:
(1)在达到预设压力的时候,由于惯性以及控制器的延时性,会产生压力的过冲;
(2)在电池充放电过程中会产生大量气体,导致电池膨胀,从而使得夹具内部压力波动,针对这两个问题,利用PID 控制算法实时监视系统偏差,在每个采样周期都对的被控量的输出值进行监控以及计算,进而实时地调节执行机构动作,达到压力的精准控制。
2 恒压夹具系统设计
2.1 夹具系统的结构及原理
本次设计的恒压夹具结构如图2所示,采用PLC 伺服控制系统,电池通过机械手和电池导向机构进入到电池放置通道,在收到夹具启动命令后,首先PLC 驱动伺服电机带动丝杠推动板快速定位至预紧位;到达预紧位后,切换至慢速运行,通过压力传感器对夹具通道内的压力进行实时检测,压力信号由PLC控制器进行实时采集,并通过PID 控制算法的计算,实时地改变伺服电机的运行速度,直至实时采集的压力值在给定设定范围内,伺服运行停止,系统稳定。

图2:恒压夹具结构示意图
2.2 控制系统的硬件框架
本次设计的控制系统硬件主要包括压力检测单元、PLC 主控制器、触摸屏人机界面、伺服驱动控制系统组件及配套传感器单元、保护传感器单元以及电池充放电交互模块。控制系统的硬件框架如图3所示。

图3:恒压夹具控制系统硬件框图
2.2.1 PLC 主控制器
本控制系统采用西门子SIMATIC S7-1200 型PLC CPU1214 CDC/DC/DC 作为主控制核心,并设置 SM1223 型混合输入输出模块以及EDS-205A 系列5 端口工业以太网交换机,共同组成该控制系统的主控制器。
西门子SIMATIC S7-1200 型PLC CPU1214CDC/DC/DC 具有100K 的工作存储器,CPU 执行速率快,可以到达0.04ms/1000 条指令;供电电源采用DC24V,PLC 本体设有14 个输入点与 12 个输出点,输入点支持源型和漏型两种接入方式,可以适用不同输出形式的传感器接入,输出点最高输出 100kHz 高速脉冲信号,能够达到夹具伺服运行控制的速度要求;自带2 通道A/D 采集单元,采用高精度的16 位采集电路,具有很高的A/D 转换精度,且自带降噪滤波器,本文中主要用于压力信号的采集;设有PROFINET 网络接口,具有很高的传输速率,用于编程、HMI 界面以及PLC 之间的通信;设有4 个脉冲发生器接口,可以实现4 个伺服轴的驱动,并设有伺服工艺接口,可以方便的对伺服脉冲和实际位置值进行转换。SM1223 型混合输入输出模块为PLC 输入输出扩展模块,提供16 路输入与16 路输出口。EDS-205A 系列5 端口工业以太网交换机是PLC 控制器与触控屏的连接纽带,其最高支持100Mbps 的传输速率,且各通讯口均采用光耦隔离,具有较强的抗干扰能力。
2.2.2 人机交互界面
本控制系统的人机界面采用10 寸的proface 触摸屏作为显示操作屏幕,通过以太网通讯方式与PLC 主控制器进行通讯。针对本次控制系统设计了恒压夹具操控交互系统,包含监控界面、操作画面、状态显示、参数设置以及报警维护等交互界面。通过触控屏可以对伺服参数、压力参数、PID 参数以及系统参数进行设置,且设有不同电池类型切换参数功能,满足不同种电池的加工;另外,该系统配置有数据存储功能,可将实验数据实时存储在 USB 存储介质中。
2.2.3 传感器
本控制系统中采用的传感器主要有光电传感器和压力传感器,伺服限位和原点传感器采用欧姆龙槽型开关EE-SX674 进行检测,该传感器体积小,安装方便,通过接线方式的更改实现常开常闭的信号的切换;通道中电池有无的检测采用欧姆龙对射传感器E3Z-T61;电池位置检测采用激光对射传感器FU-78,该传感器的光斑只有0.5-1.5mm,可以大大减少由光斑散射而带来的误检测;本次采用压力传感器YZC-218C 对夹具通道内的压力进行实时的检测,测量量程为 5000kg,输出为 4 ~20mA 模拟信号。
2.2.4 伺服电机
本次采用三菱HF-SN102J-S100 型伺服电机及三菱MR-JE-100A 型驱动器作为恒压夹具传动的动力元件,其机械响应速度快,最高转速可达3000r/min,电机内部集成20bit 位置编码器,可实现位置与转速的精确控制,满足恒压夹具准确进给的要求。
3 系统软件设计
本控制系统的编程软件选用西门子博图TIA_Portal_STEP_7_V15,编程语言选用梯形图和高级语言结合的方式进行;本程序框架主要由传感器采集、PID算法、自动运行、原点复归、参数配置、交互信号处理以及手动操作,系统软件设计框图如图4所示。

图4:恒压夹具控制系统软件设计框图
传感器采集程序主要实现夹具压力信号的实时追踪,给PID算法提供实时准确的压力信号输入;PID 控制算法主要是实现当系统出现压力扰动信号后,实时地驱动伺服电机进行调节,从而保证系统的恒压稳定环境,压力因素是电池在充放电过程中一个非常重用的技术指标;原点复归程序主要实现系统出现故障或者其他问题后,恢复系统至运行初始位置,保证系统的运行安全;参数配置主要实现伺服电机参数、压力设定参数以及不同型号电池参数切换等功能;交互信号处理主要实现夹具系统和电池化成装置之间的握手协议,夹具稳定后,触发电池化成启动,电池化成结束,驱动夹具系统张开;操作部分可分为手动和自动两大部分,手动模式下可以实现,伺服电机的点动、回零、手动定位、传感器的标定、信号测试等操作,以及系统出现故障后,在手动模式进行归零操作;自动模式下,根据设置好的伺服参数、压力参数以及PID 参数,系统在接收到命令,自动让夹具系统达到设定的压力要求,并保持恒定的压力环境。
3.1 压力采集程序
压力采集的程序流程如图5所示,由于电池内部产生的压力干扰,不仅直接影响电池的化成效果,而且还大大影响电池的性能参数,因此必须尽可能准确的对压力进行实时监控,为了保证较高的采样精度,选用循环中断程序来完成压力的采样;本次设计中采样周期设置为50ms,每隔50ms 进行一次压力的采样,采样的数值存放在PLC 的寄存器中;本次选用的压力传感器的量程为0~5000kg,而PLC 采样的数值的范围为0~27648,根据A/D 采样计算算法,便可以得到夹具内部压力的实时值。

图5:压力采集程序流程图
3.2 伺服控制设计
本控制系统伺服控制如图6所示,运动机构的进给由伺服来进行驱动,伺服电机采样脉冲控制方式,因此有较高的进给精度,可以有效的减少本恒压系统由于进给惯性带来的压力波动。本次采用PLC 自带脉冲口作为脉冲源,来驱动伺服电机的运行,脉冲频率最大可以达到100KHz。伺服运行分为预紧段、慢速段以及张开段两个部分:

图6:伺服控制流程图
(1)预紧段。在行程前半段,电池还没有和电池通道的内壁接触,内部压力为零,为了提高运行节拍,采用位置控制模式。在手动模式下设定好预夹紧位置的坐标,并将坐标值设定接口开放在触摸屏上,并设置好配方,不同类型的电池,可以选择不同的预夹紧位置。自动模式下,伺服电机接收到启动命令,按照给定的坐标值和运行速度,快速运行至预夹紧位。
(2)慢速段。在行程后半段,压力传感器实时检测夹具内的压力,此时如果仍采用快速定位的模式,势必会引起压力的过冲,因此为了达到良好的调节性能,采用速度运行模式,PID算法根据压力信号的变化,实时的输出调节比例,进而实时的调节运行的速度,当压力实时值在调整的范围之内,伺服停止动作,系统稳定。
(3)张开段。张开段控制采用定位运行模式。电池充放电结束后,通过交互程序块,将信号反馈给PLC 主控制器,主控制器发出张开命令,伺服电机按照预设的张开位坐标以及张开速度运行至指定位置。
3.3 PID自适应程序设计
本次PID算法的控制流程如图7所示,为了提高采样精度,采用PLC 中的循环中断程序,采样周期设置为50ms;在初始化程序中,主要对PID 参数进行初始化操作;PID算法的输入被控量为压力信号偏差eM(n),为压力设定值和传感器实时采集的压力信号之差,通过PID 控制算法,在每一个采样周期,输出一个与信号偏差eM(n)相对应调节值,PID 控制算法如公式(6)所示:

图7:PID 控制流程图

式中:uM(n)—PID算法的输出量;kp—比例系数;eM(n)—压力实际值与给定值的偏差;ekd—上一采样周期偏差;Td—微分时间常数;Tsampling—采样时间;TI—积分时间常数;ekl—累计偏差;
基于压力被控量的PID 输出量经过压力-速度转换算法得到相对应的控制速度,具体计算算法如式7所示:

式中:uvel(n)—电机的控制速度输出;uM(n)—PID算法的输出量;urate(n)—控制比率;velsetting—速度设定阈值;uM_limit—PID算法输出阈值。
4 系统测试及结果分析
恒压测试夹具如图8所示,设备组装完毕后,分别进行传感器标定、伺服基本功能调试、PID 参数校准以及程序自动运行测试,在设备满足测试要求后,采用刚出厂锂电池电池包进行测试,电池的额定受力为1500kg。

图8:恒压测试夹具
本次采用了两种不同的控制方法分别进行了测试:
4.1 未引入PID控制算法
此种控制方式的快速段和慢速段控制方式均采用位置控制模式,以恒定的不变的速度进行进给,当压力值在压力阈值范围内伺服控制停止;当系统出现扰动,超过压力阈值,伺服以恒定速度启动定位控制。
4.2 引入PID控制算法
此种控制方式的快速段采用位置控制方式,以恒定的不变的速度进行进给;慢速段的控制采用速度运行方式,控制速度随着压力的实时值的变化而实时变化,当压力值在压力阈值范围内伺服控制停止;当系统出现扰动,超过压力阈值,伺服启用速度运行模式,进行精准调节。经过多次测试,测得数据对比如表1所示。

表1:不同控制方法测试数据对比
表1 中列举了三种不同模式下所测试的数据,通过对数据进行分析发现,没有进行校准的情况下实际压力值均值和标准差都比较大,采用固定速度校准模式的方法,相对于第一种方式,标准差有很大的变化;而采用PID 控制校准模式的方法,标准差仅为1.5kg,控制的准确度大大提高, 保证了本控制系统稳定的恒压环境, 进而提高了电池充放电的效率,提高电池的品质。
5 总结
(1)针对锂电池恒压夹具在化成和控制过程中产生的压力干扰,本文采用伺服控制系统和PID算法相结合的方法,将压力被控量和伺服控制的速度被控量建立联系,通过实时采集的压力值的变化,及时的调节伺服控制的速度,从而有效的减少了由于惯性而造成的压力不确定性,较好地解决了控制过程压力干扰,保证恒压夹具的稳压环境。
(2)从特定对象出发,将PID算法运用到伺服恒压系统中,通过数据测试可以发现,采用此种方法,可以大大地提高系统控制的精度, 有效的减少由于压力扰动因素而导致的锂电池充放电效率和效果, 进而最终提高锂电池的性能指标。
(3)该项技术对恒温控制、恒压供水以及管道压力控制等一些需要保持恒定被控量的应用有较大的参考价值, 尤其是针对控制精度较高的场合, 显得尤为重要。
