基于二自由度动力学模型车道保持辅助模型研究
2021-03-07胡鑫
胡鑫
(上海南湖职业技术学院 上海市 200439)
近年来,随着智能化技术的发展,汽车安全驾驶技术得到发展,基于车道偏离预警[1](LDWS)发展的车道保持辅助系统(LKAS)技术的相关研究取得了显著的成果。该系统能够有效的减少因车道偏离而发生的交通事故。车道偏离预警系统能提醒驾驶员,车辆处于非正常行驶状态,驾驶员此时可根据车辆行驶状态进行调整来避免事故的发生。但是当驾驶员不能及时更正驾驶状态,车辆将发生事故,而车道保持系统更够自主保持和修正行车状态,所以车道保持系统就能在这个过程中减少事故率。
国内外现已经做了很多有关车道保持系统的研究:Katzourakis等[2]提出了一种共享控制方法,将驾驶员意图与鲁棒性控制相结合,通过修正前后轮转角实现车道保持功能。程慧 提出了一种基于两点预瞄的车道保持控制方法,可根据真实驾驶员视觉注视范围,确立远近两个预瞄点并将其结合,提高车辆行驶稳定性。张杰[4]提出一种基于模糊滑膜的车道保持控制方法,通过控制中心运动点变换速率与车辆运动状态保持一致,有效降低了误差。
虽然车道保持系统相关研究很多,但是不同的方式存在局限性。不同的驾驶员拥有不同的驾驶习惯,单一模式的车道偏离预警系统并不能适用于所有驾驶员。本文设计的模糊控制方法,对非线性问题具有智能控制的效果,不仅能有效的处理状态及输入输出约束,而且能够在线调整约束区间。该模型具有滚动时域优化特性,能更好的解决车辆参数、驾驶员行为、道路环境所存在的不确定性问题。
1 驾驶员预瞄模型
车道保持辅助系统的核心问题[5,6]是辅助驾驶员更好的操控车辆,减少驾驶员的驾驶负担,并减少事故率。驾驶员特性是使车辆的运动轨迹与预期的轨迹保持一致。在处理模型时需要考虑驾驶员反应滞后的时间差、驾驶动作操纵力限度、向心加速度限制、方向盘转角的限制等。
对于人-车构成的闭环系统进行操纵性研究[7],对于驾驶员模型可分为两大类:预瞄跟踪模型和补偿跟踪模型,如图1,为两种模型示意图。图1 中G (s) 是车辆的特性、H (s) 是补偿环节、P (s)预瞄环节、B (s) 是感知环节。

图1:驾驶员模型
预瞄模型实现的原理:驾驶员通过目标路径的坐标信息来计算期望的跟踪轨迹,模型实际的跟踪轨迹与车辆的期望轨迹误差对方向盘转角的决策有影响。在预瞄跟随理论的基础上,采用驾驶员的实现聚集于道路预测轨迹上的一点,驾驶员可选择最优路径转向预瞄点来减少和路径的横向偏差,单点预瞄车辆模型如图2所示。

图2:单点预瞄车辆模型
车道保持系统车辆的期望路径是通过改变前轮转向角来实现,为减少实际的偏离量,需跟踪理想横摆角速度。为实现控制横摆力矩和改变车辆转向角,通过轮胎的纵向与横向力产生的纠正力矩来完成。因此基于理想横摆角速度来实现车道保持功能。由驾驶员模型有,在时刻,预瞄距离L 处的横向偏移量可采用泰勒公式估算:

其中:

对于质心的横坐标,理想值与预测值相同:

车辆质心侧偏角较小时,直线工况下的横向加速度和横摆角速度φ 关系:

曲线工况下道路曲率rc和横摆角的关系:

综合以上公式可得期望横摆角速度:

2 车辆侧向动力学模型
汽车动力学模型以自由度区分,包括二自由度、三自由度、七自由度、十自由度、十七自由度等模型。车辆模型自由度越高,模型的运动特性越多,系统与符合实际运动过程越完善,但是其带来的复杂程度也越高,计算难度也增加。本文选择二自由度车辆模型作为数学模型进行计算。相对于复杂的十七自由度模型,二自由度模型采用忽略轮胎与悬架的非线性特性,重点针对汽车横摆和侧倾状态。由于二自由度模型只分析车辆的侧倾、横摆运动,当轮胎工作在线性区间时,其计算复杂度相对于其它模型简单,而且能够准确的描述车辆侧向运动特征,因此采用这一模型。当轮胎的侧偏特性满足线性状态时,模型能有效反应车辆的侧向动力学特性。如图3,为而自由度车辆动力学模型。

图3:二自由度车辆模型
图3 中参数含义:φ 为横摆角速度、lf为前轮与质心距离、lr为后轮与质心距离、m 为汽车质量、I 为转动惯量、Cf为前轮侧偏刚度、Cr为后轮侧偏刚度、Ffy为前轮侧向力、Fry为后轮侧向力、αr为后轮侧偏角、αf为后轮侧偏角、δ 为前轮转角、ψ 为横摆角。
对二自由度车辆模型[8]做以下假设:
(1)忽略左右轮各自运动状态,即将左右轮当成一个车轮,前轮转角作为系统输入,决定车辆的转向。
(2)忽略车辆受到的空气作用力,且横向速度相对于纵向力小,纵向加速度变化率较小或者不变化。
(3)车轮的侧偏力和侧偏角不是非线性的关系[9],车辆运动不失稳。
(4)忽略车辆的侧倾运动和俯仰运动,假设其在平面内运动,质心的高度不改变。
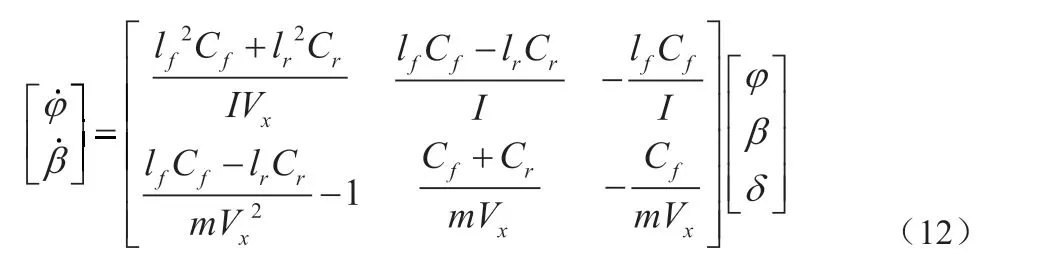
结合上一节驾驶员模型可得车道保持的最优转向角为:

式中i 是转向系统传动比。当处于较小的转角时,车辆的运动方程是:

车辆的侧向力与侧偏角存在线性关系,且满足以下关系式:

将上式转化,可得车辆动力学模型:
3 模型预测控制器
3.1 模型预测控制原理
模型预测控制[10](Model Predictive Control, MPC)作为一种反馈控制策略被广泛应用。MPC 通过模型和当前实测值来计算被操纵变量的下以动作,以确保所输入和输出满足模型约束条件,其控制原理如图4所示。

图4:模型预测控制原理
3.2 预测控制模型设计
当车辆在自主控制保持车道的状态下,汽车的稳定性是非常重要的参数,而影响汽车稳定性的参数主要是横摆角速度和质心侧偏角。MPC 控制系统通过预测模型跟踪的最佳横摆角速度,再由约束条件来调整输入量而得到最优目标值,得到下一阶段控制量。如图5 为MPC 模型控制器组成。

图5:模型状态变化图
根据前面所述,可得相对应不同状态直接关系:


控制输入在预测时域范围内可表示为Uk:

系统的参考输入作为系统输出跟踪期望的输出:

系统控制约束:

系统输出约束:

定义优化目标函数:

假设在k 时刻,系统的最优解为:

根据上式,将(k+i)时刻的u*(k+i|k)作用于系统,并将y(k+i+1)作为(k+i+1)时刻的初始条件,重新对系统进行预测优化,依次循环。
通过上面的分析知,为实现控制目的,需对带约束优化问题进行滚动求解。预测控制的三个特点是:预测模型,可根据系统的上一状态的信息和控制输入来预测下一状态的输出;滚动优化,可实现在线反复优化,通过最优项性能约束来控制最优控制量;反馈矫正,通过输出值与实际误差进行反馈调节,修正上一时域的预测,并对下一模型进行优化。
3.3 控制器设计
根据第二节中的二自由度动力学方程设计控制状态方程有:

其中rc为道路曲率。现有用欧拉法进行连续变量的离散化,并在控制时域内展开有:

根据上式,依次可推导出在预测时域内状态输出量的计算公式。
4 仿真验证
4.1 仿真环境设置
通过上节建立的模型,利用matlab 中的模块和M 脚本来实现各工况下的模拟实验。如表1 为仿真模型参数。

表1:仿真模型参数
在matlab/Simulink 中搭建如图6 模型,进行试验。为验证系统在较复杂工况下的性能,研究工况在较小的启动阈值和较大曲率半径下,车辆行驶速度较高时,车道保持系统的工作状况。同时考虑车辆在车道保持过程中与前方车辆的安全距离,需要融合相机、雷达传感器的数据进行综合判断。曲线道路半径为250 m;车辆初始速度为72km/h;采样时间为0.1s;每个直线路段长度为45m;每段路径设置5 个路径点;路径总共包括4 段,第1 段是直线段,其横向坐标Y 保持不变,第2 段是曲线段,其向左弯曲,即沿逆时针方向,第3 段是曲线段,向右弯曲,第4 段是直线段。

图6:LKA 控制算法
4.2 仿真结果分析
如图7,为道路路径仿真图。当检测到车辆与车道边界距离小于安全阈值,车道保持辅助系统启动来改变车辆航向。如图8,当汽车行驶在X 坐标范围为[70 120]、[240 280]、[390 420]处,车辆发生偏离,在车道保持系统的作用下,使车辆重新回到中心位置。当2.4、6.6s、12.2s、16.5s、18.6s 时,车辆的侧向偏移量超出阈值。此时车道偏离预警,在2.7s、1s、2.7s、1.2s、2.8s 时车道保持系统开启工作。从图9 可看出辅助转角在这些点变化加大,辅助驾驶员的转角工作,当车辆处于正常状态后,辅助转角变小,驾驶员转角主导。

图7:道路路径仿真图

图8:车辆相对偏离量

图9:转向角与辅助和转向角
如图10,在整个仿真过程中,车辆的运动参数变化情况。车辆的相对偏航角在[-0.2 0.2]弧度内变化;车辆相对于车道侧向偏离距离保持在[-0.5 0.5]内变化;车辆方向盘转角在[-0.5 0.5]内变化。整个过程中,车辆未出现过大的偏离,车辆具有良好的稳定性,满足设计的要求。

图10:A-相对偏航角,B-偏离距离,C-方向盘转角
通过对以上仿真结果的分析,在高速公路的标记车道中,本文设计的MPC 车道保持系统能协助驾驶员安全行驶。在不同行驶车速和路况下,LKA 系统能够及时预警并开启车道保持功能。
5 结束语
本文首先建立了驾驶员预瞄模型和二自由度车辆模型,并介绍了模型预测控制原理,设计了MPC 控制器。最后搭建仿真环境,根据对仿真结果的分析可知,验证了LKA 的实时行和准确性。通过这样的仿真试验,可以提升辅助驾驶仿真的效率和精度,节约测试成本,缩减测试周期,为车辆开发也带来了极大的便利。
