四旋翼无人飞控系统的设计及实现
2021-03-07许奇
许奇

摘要:该文对四旋翼飞行器的飞行原理进行了简单的介绍和分析,并根据其原理进行机械结构上的设计,能让四旋翼飞行器在空中能够平稳运行。通过研究设计,利用合适的控制方法能实现对四旋翼飞行器垂直运动、前后运动、侧向运动、滚转运动、俯仰运动、偏航运动共六个自由度的控制,同时验证了四旋翼飞行器整体系统的硬件和软件的设计的可行性,使其能通过遥控控制实现平稳地飞行。
关键词:四旋翼无人机;STM32F405;电机控制;飞行原理;卡尔曼滤波
中图分类号:TP391 文献标识码:A
文章编号:1009-3044(2021)36-0173-02
开放科学(资源服务)标识码(OSID):
随着社会的发展,在越来越多的领域四旋翼无人机有着独特的优势,很难找到它的替代品。万物互联的大时代正在到来,随着通信技术、智能控制技术的快速发展,无人机的应用范围更加宽泛,人们对无人机的使用需求也在日益增加,无人机的消费市场正在迅速打开。不难预见,在未来人们的日常生活中,民用无人机将提供更多的方便和帮助。民用无人机产业链正在逐渐完善,规模化生产已基本实现,未来的市场规模巨大,商业價值显著,也正是因为这样,对四旋翼无人机的研究具有良好的市场前瞻性。
1 国内外研究现状
从1907年开始,在国外对多旋翼飞行器的研究就已经出现了萌芽,由于当时的计算机水平和电子技术的水平不高,尽管已经有一些实际的成品被制作出来,但多旋翼飞行器还是没有得到广泛的应用。
在21世纪以来,国内外的许多机构和学校都在自己的领域以四旋翼飞行器进行大量的研究和应用,不断地探索四旋翼飞行器的各种方面的技术和算法,以此来研发出更多能满足人们需求的四旋翼飞行器,而且由于目前的研究方向主要集中在小型和微型飞行器上面,嵌入式技术作为微电子技术的重要分支也在其中扮演了重要的角色。
随着硬件制造技术的飞速的发展,四旋翼无人机的微系统、传感器、处理器芯片以及控制理论等技术迎来了一个全新的时期。硬件材料性能越来越好,集成度也越来越高,价格也越来越便宜,这些特点不仅受到越来越多研究机构以及公司的重视,也使四旋翼无人机成为优良的无人机研制平台。不光是国内外的重点大学,还有诸多科研机构以及商业公司也都想抓住这次机会,对四旋翼无人机进行深入研发。目前,商用四旋翼直升机模型是研究四旋翼无人机的主要形式,重点研究其中的建模、控制和规划等环节。
2 系统的硬件设计
硬件总体方案设计如下:
(1)将STM32F407芯片作为主控单元,系统驱动需要+5V的直流电压;
(2)使用MPU6050姿态传感器模块来实时检测飞行器的飞行姿态;
(3)采用PWM控制信号来控制电机转速实现飞行器姿态改变;
(4)遥控控制模块采用的是Microzone航模专用遥控器来发送和接收控制信号。
系统的总体框图如图1所示。
AT89C51是单片机入门的一款芯片,其处理速度已远远达不到设计要求,就将STC15和STM32两款芯片作为设计的主控芯片的方案选择,由于身边刚好有STC32芯片的设计,就将STM32F405芯片作为本次设计的主控芯片。STM32F405芯片的工作电压范围在2.0V~3.6V,具有2个I?C接口,且具有112个快速I/O口,6个通道用于PWM输出,其运算精度极高,存储EEPROM容量大,能够满足飞行器的实时姿态检测的数据存储需求。
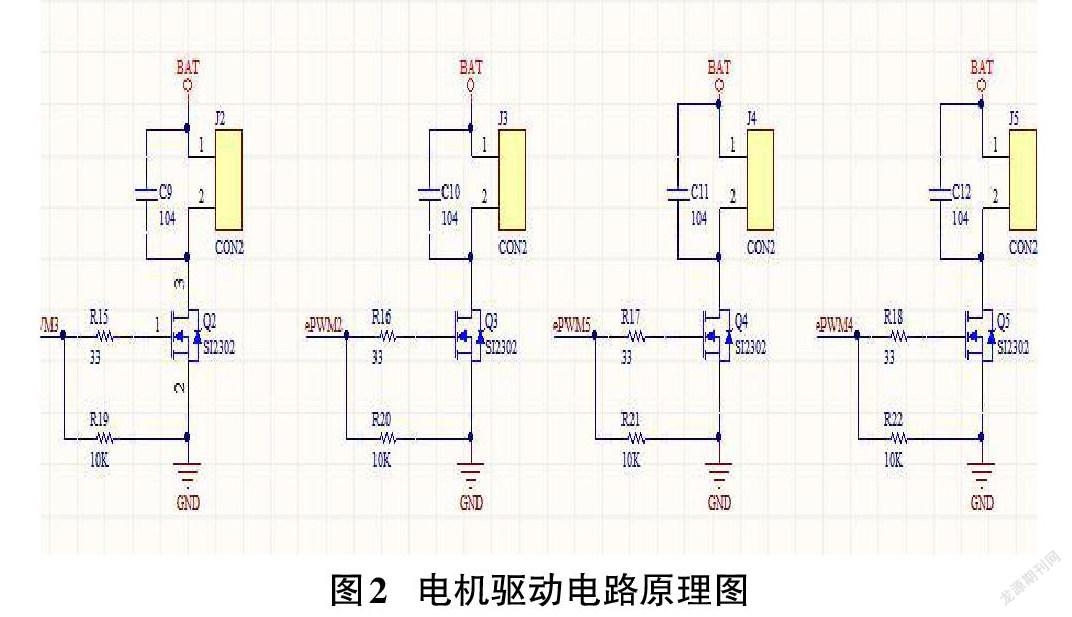
本次设计的是四旋翼飞行器,所以选用的是体积小的直流无刷电机。直流电机具有能量耗能低、控制率高、可利用性大的特点,与有刷电机相比,其能量转换率更高,噪音小,响应速度快,直流无刷电机的虽然价格成本稍高,但是后期的维护成本较小,因此选择直流无刷电机作为本次设计的电机驱动系统。电机驱动模块是通过STM32的PWM通道输出方波脉冲,通过改变占空比来驱动电机,重复频率为20Hz~50Hz,从而控制电机的转速,改变飞行姿态。电机驱动模块的电路原理图如图2所示。
3 系统的软件设计
3.1 软件系统设计方案
整个软件的系统设计由单片机主程序、姿态检测程序、无线通信程序、电机驱动程序组成。飞行器控制软件的编译环境是在Keil5上采用C语言进行编写,其目的是在硬件设计的基础上,结合软件编程实现对硬件的驱动,使其实现预想的功能,满足设计的要求,同时还可以进行控制,对设计进行操作。C语言是目前应用最广泛。最基础的计算机语言,使用C语言编写系统软件程序能使开发者更容易理解和学习,在需要修改的时候也更方便。在本次系统的设计中,运用到了比较复杂的算法,所以选用C语言进行编写。在硬件设计阶段采用的控制芯片为STM32F405,软件设计中编程调试的软件采用的是Keil5的嵌入式集成开发环境。C语言可以很容易在软件中编程和调试,并且支持SWD实时硬件仿真的调试,因为在课程学习中较为熟悉Keil5软件,故而选择该软件作为本次设计的软件设计与调试的平台。
3.2 单片机主程序流程
单片机系统的主程序负责对整体系统的控制和协调其他子程序的实现功能和正常运行。上电后程序开始先对整个系统进行初始化,判断整个系统是否正常运行。若系统能正常进行,则开始进入程序的主程序循环,不断采集飞行器实时姿态信号,并与姿态检测模块得到的数据相结合,并将这些得到的数据信息存储起来,以备后面的中断处理程序使用。初始化完成的是对硬件的初始化、对传感器模块的初始化、对软件系统参数的初始化等。其中MPU6050中包括陀螺仪和加速度计,设置采样频率为100Hz,而电机输出信号的频率为50Hz,即每检测到两次飞行器姿态数据就输出一次控制信号。
4 结论
本文根据四旋翼飞行器的特点对四旋翼飞行器的控制系统进行设计与研究,提出了基于STM32系列的四旋翼飞行器的研究设计方案,根据设计方案展开对芯片和模块的论证,以及硬件电路的原理设计和电路板的制作。在实际调试的过程中,发现飞行器悬停不稳定,很容易受到气流的影响。导致失控,应该再增加气压计、磁力计和GPS 模块等惯性测量模块来使飞行器能更稳定地飞行,实现定高、定点的功能,同时将传感器模块设计得更加合理,以避免干扰产生误差,影响姿态测量的精度。
参考文献:
[1] 余莉,顾泽滔,王伟,等.四旋翼无人机的高度控制[J].测控技术,2016,35(1):73-76.
[2] 丰趁得,刘庆元,欧野.MEMS-IMU/GPS/GPRS组合导航方案设计与实现[J].传感器世界,2016,22(5):24-28.
[3] 潘佳笛.基于双核CORTEX-M4的MAVs传感器系统的研究与实现[D].南京:南京信息工程大学,2016.
[4] 王亚丁,徐俊臣,李冠宇,等.基于FreeRTOS系统和LwIP协议栈的网络通讯[J].电子技术与软件工程,2016(20):14-15.
[5] 王积翔.四旋翼无人飞行器的飞行姿态控制研究[D].哈尔滨:哈尔滨工程大学,2017.
【通联编辑:唐一东】
