城市地下综合管廊的巡检无人机设计
2021-03-06徐梓祺邢华宁卢镇成戴创昆甘睿科指导老师
徐梓祺 邢华宁 卢镇成 戴创昆 甘睿科 高 远(指导老师)
(广西科技大学,广西 柳州545000)
1 研究主要内容
为提高地下综合管廊巡检的效率和机动性,以六旋翼无人机为搭载平台,STM32 微处理器为主控制器。实现高效全面的自动化无人机管道巡检。研究内容如下:(1)结合不同的检测对象,可搭载的传感器采集电路的设计;(2)无人机飞行障碍物检测电路和自动避障控制电路的设计;(3)制定无人机自动巡检的循迹方案;(4)制定无人机与地面用户终端间无线通信方案,实现用户对无人机巡检情况的远程监控;
2 城市地下综合管廊的巡检无人机设计
系统以地下综合管廊作为巡检研究对象,提出能对管道内图像信息、多种气体数据和电线破损信息进行检测的城市地下综合管廊的巡检无人机设计。以WiFi 为传输媒介搭建WiFi 中继站进行检测数据信号的远距离无线传输,结合运用云端实现用户终端对传感检测数据进行查看和对无人机的飞行模式进行远程操控。
系统以实现综合管廊内情况的快速获取、远程传输与智能管理为目标,采用分布式客户机/服务器形式,由用户终端以及传感器通过WiFi 网络为传输媒介组成。主要完成采集管廊内管线环境数据信息、操控摄像头和电子设备,图像显示和无人机设备的远程控制等功能。
2.1 巡检无人机设计系统的总体框架。图1 所示为城市地下综合管廊的巡检无人机设计系统框架图。其中:(1)视频采集装置主要由紫外线成像仪、高清摄像仪、红外成像仪组成。气体检测装置主要由甲烷传感器、CO气体传感器、硫化氢气体传感器、温湿度传感器组成;(2)用户终端能够直接在现场与主控制器通信,读取和显示出无人机上各装置所采集的气体参数以及视频图像信息,或授权给云端用户终端从云端读取和显示出无人机上各装置所采集的气体参数以及视频图像信息并进行远程操控;(3)无人机通过将城市地下管廊的路径数据输入到主控制器并配以超声波传感器避障的循迹方式,来实现无人机的自主巡检工作。
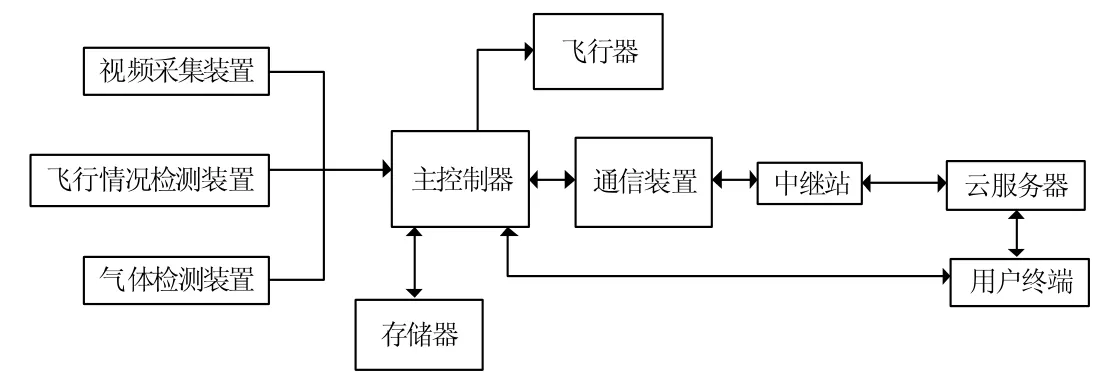
图1 城市地下综合管廊的巡检无人机设计系统框架图
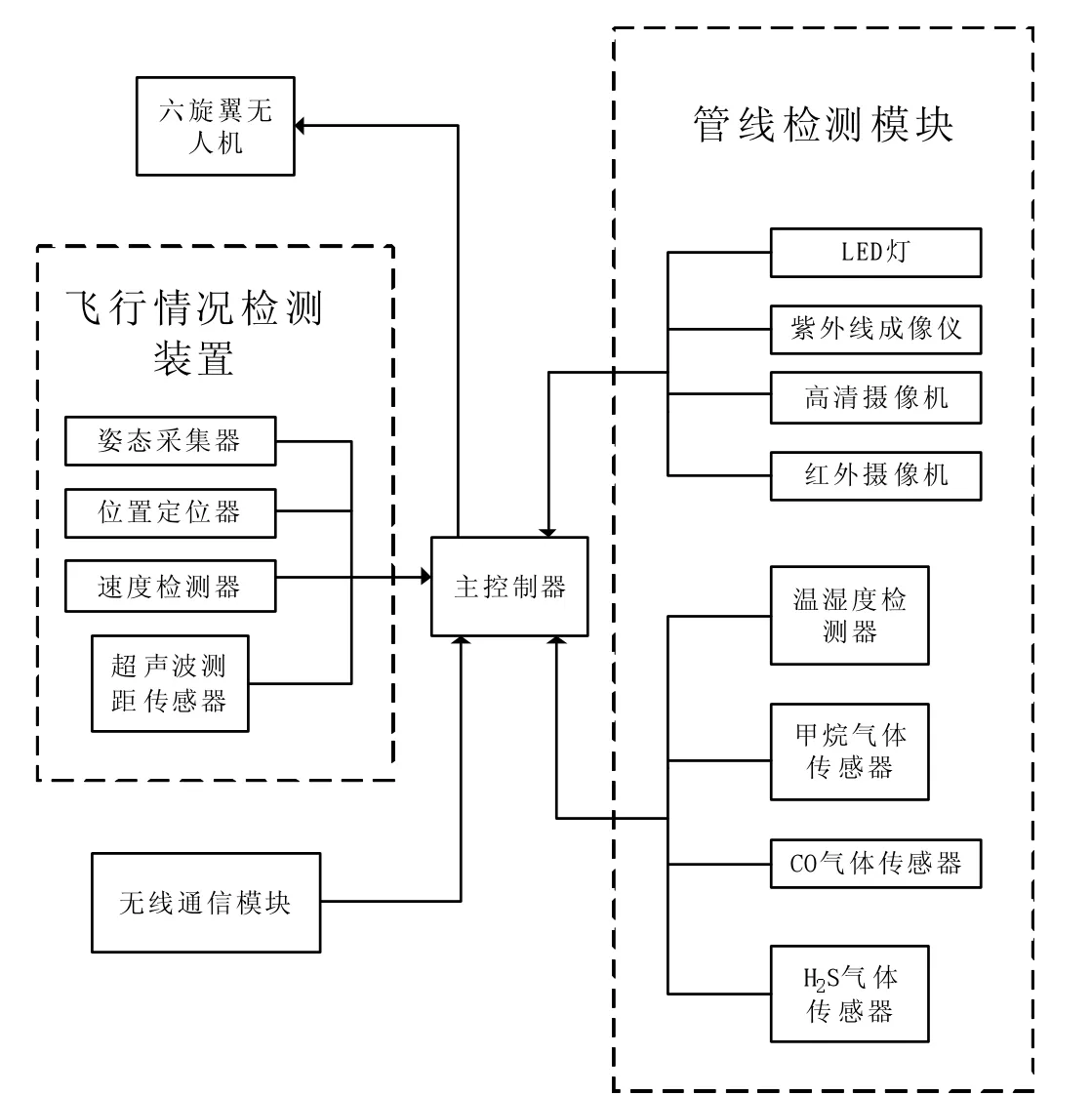
图2 巡检无人机所搭载的系统结构示意图
2.2 搭载多传感器检测采集电路的设计。(1)管廊内环境图像数据的采集电路设计。考虑管廊内光线不足情况,采用型号为HP-DRCO427 的高清摄像机使工作人员远程即可查看管廊内情况;(2)电缆漏电现象的检测电路设计。针对电缆破损、受潮、管理不当等原因所导致的肉眼无法辨别的电缆漏电问题,采用型号为XC-EU50CE 的紫外线成像仪可以查看电缆导线在受潮或积污情况下的电晕放电特性,从而判断出电缆漏电点;(3)电缆过热现象的检测电路设计。针对电缆氧化腐蚀,导线接头松动等原因导致的电缆过热问题,采用FILR 公司的A300 红外摄像机,通过查看热像图可以得到电缆导线的温度,找出电缆故障时的热故障点;(4)空气成分数据的检测电路设计。针对空气中的温度、湿度,以及一氧化碳、甲烷和硫化氢气体的含量检测,选用型号为DHT11 的温湿度检测器,CO 气体传感器型号为MQ-7,H2S 气体传感器型号为MQ-135,甲烷气体传感器型号为MQ-2。
2.3 设计无人机飞行障碍物检测电路和自动避障控制电路。相比较于地面飞行,地下综合管廊的空间较小,所以当无人机飞行时对管廊内的障碍物进行检测和自动避障控制,必不可少。
(1)无人机飞行情况的传感采集电路设计。针对城市地下综合管廊如一管廊的道路为东西向主干路, 规划道路红线宽60m,两侧绿线30m 控制。路下共规划给水、雨水、污水、电力、通讯、热力、燃气、中水等8 种常用管线。规划综合管廊长度约2.8km,管廊净高5m。采用型号为LIS3DHTR 的速度检测器,姿态采集器采用ADI公司生产的集成惯性测量单元ADIS16405,位置定位器选用u-bloxAG 公司的ANTARIS4GPS;接收机主控制器的型号为STM32F103C8T6;存储器为16M 容量的Flash (华邦公司W25Q128)和4G容量的SD卡组成;无人机型号为S550。(2)障碍物检测电路的设计。针对无人机的自动避障功能,采用型号为HY-SRF05 的超声波测距传感器进行设计障碍物检测电路。(3)制定避障时的飞行控制策略。项目中六旋翼无人机飞控采用PID(比例- 积分- 微分)双闭环控制策略,无人机飞行障碍物检测和自动避障控制通过采集超声波数据(超声波模块发出40kHz的脉冲,当检测到回波信号后,对其进行温度补偿),并在分析该数据的基础上,结合一阶低通滤波、限幅滤波和中位值滤波对其进行处理,根据处理后的数据通过控制飞行器Y 轴和Z 轴来实现避障,且前、后、左、右4 个超声波模块对飞行器的控制是线性叠加的,相互之间不会产生干扰。(4)飞行姿态传感器初步选型及其工作原理。选择ADIS16405 姿态传感器,它与主控微控制单元的通信协议采用集成电路总线方式。系统运行时主控单元需要对传感器进行数据的读写,即对姿态传感器的寄存器用IIC 进行数据读写,程序中先将ADIS16405 的数字运动处理器相关参数配置好,通过ADIS16405采集运动信息,通过传感器自带的DMP 直接将原始数据解算出四元数和姿态,而不需要在程序中进行额外的数学运算。得到四元数等数据后再经过数学运算便可求得欧拉角,计算出目标欧拉角与实际欧拉角的差,输入比例积分导数控制器即可。用ADIS16405 的XCL,XDA端子与数字罗盘的SCL,SDA端子相连,这样一来就可以从此IIC接口读出一个9 轴的信息,包括三轴的MEMS 陀螺仪姿态信息即3 个轴的角速度;三轴的加速度;以及三轴的磁感应强度。这三者之间相互矫正可以为飞行控制系统提供较为精确的姿态以及运动方向信息。
2.4 研究制定无人机自动巡检的循迹方案。结合城市地下管道声波较为稳定的特点,项目采用超声波传感器循迹方案。利用无人机软件系统中的A/D采集驱动程序,将规划路线写入无人机路线规划系统,结合超声波模块。实现无人机自主飞行。设备驱动软件中的A/D采集驱动程序是进行路线规划的重要部分。A/D 采集驱动程序能够将空速计发出的电压信号转换为所需的空速信息。A/D采集芯片采集到空速计发出的电压信号,读取时需模SPI 通信设备。A/D采集驱动程序含有硬件初始化、选择转换通道等部分。当流程进入硬件初始化部分后,设置主控制器的串口,以及SPI 初始值和控制寄存器参数。写入无人机路线规划控制器自校准设备和配置中的内部控制寄存器,将选择通道的A/D转换功能启动。转换工作完成后,调用读函数设备读出无人机航线规划控制结果。
2.5 制定用户终端间无线通信方案。设计采用多WIFI 中继通信技术在巡检无人机与云端的通信应用。其中,由于涉及多传感器和控制设备间的数据通讯问题,各传感器采集的数据通过无线通信模块与通信终端建立以mqtt 通讯协议为基础建立连接之后,可以将传感器采集的视频图像和气体数据参数信息传送到通信终端;同时,通信终端向无人机做响应反馈,并且下发指令,实现数据的传输。系统设计出内置有mqtt 服务端和发布端的通信终端,主控制器的通信装置内置有mqtt 客户端。客户端与发布者之间通过数据帧里的主题编号来获取自己想要的数据建立请求/应答机制,即可完成数据的合理通信。图3 为多WiFi 中继通信方式示意图。
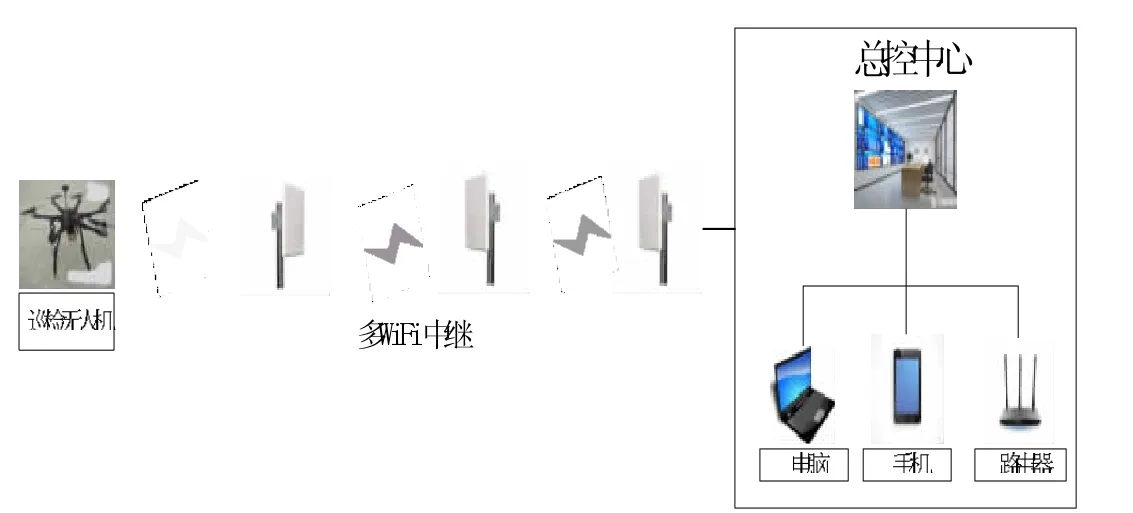
图3 多WiFi中继通信方式原理示意图
3 特色与创新点
3.1 利用六旋翼无人机作为管廊检测传感器搭载平台,相比传统人工巡检和其它类巡检机器人,机动性强灵活性高。配合多种传感器和摄像头分别采集城市地下综合管廊环境中的气体信息数据和图像数据信息传输到云端,实现对管廊内的环境信息的有效全面采集;
3.2 为实现巡检无人机与用户终端的无线通信,采用多WiFi中继方案对数据进行方便快速传输,从而保证信息的可靠性传输;
3.3 可实现用户对远程操作和自主巡检的功能需求。用户端可将地下综合管廊的管廊线路数据信息导入无人机并配以超声波避障来实现无人机的自主规划巡检路线或由使用者进行远程操控飞行。
4 结论
本设计为解决巡检方式中的不足,结合管廊内所布置的综合管线类型和管道内的环境特点,将无人机技术、传感器检测技术、远程通讯技术等相结合,研制了一种用于地下管廊综合管线的巡检无人机。
