探地雷达应用研究综述
2021-03-06李沁璘
李沁璘
(桂林电子科技大学信息与通信学院,广西 桂林541004)
探地雷达是一种通过发射和反射电磁波进而确定地下结构和目标体特征信息的高效无损探测方法。探地雷达的工作频率范围介于1MHz 至1GHz 之间,与所有雷达的工作原理类似。发射天线向地下发射电磁波,电磁波信号穿过地下介质,当遇到不同介电特性的物体时,如空洞、水、金属等等,由于介电常数、电导率或磁导率等不同,被阻抗的变化散射或反射,产生类似于发射信号形状的回波,反射回地面由接收天线接收。通过雷达回波信号进行处理分析,组成的B-scan 图像便可以观察到地下结构或者目标物的特征。探地雷达技术以其无损、高效、经济、操作方便等特点,广泛应用于地质勘探、公路检测、管道勘查、隧道勘探、考古勘察以及地雷探测等方面。
1 公路路基检测
我国公路网络纵横东西南北,公路在日常生活中发挥不可或缺的作用,但长时间的使用以及碾压,导致公路路基存在疏松,坍塌的危险,同时路基存在着诸多病害,如脱空病害、疏松病害、空洞病害、裂缝病害等等,而利用探地雷达就可以检测到路基的具体情况,提前了解路基情况,避免交通事故的发生,同时也不用损坏公路进行检测。
探地雷达是一种使用高频电磁波探测有损介电材料,以检测介质内结构和材料特性变化的方法。由于公路路基的各层所填充的材料不同,因而各层介质的介电特性参数也不同。当电磁波在一种均匀介质的内部传播,由于该均匀介质并无介电常数、电导率或磁导率等电性参数的变化发生,因而传播的电磁波不会发生反射。当电磁波从一种介质传播到另外一种不同的介质时,在两种介质的交界处,电性参数发生了变化,电磁波便会在两介质界面处发生射,电磁波的这一特性为探地雷达探测路基提供了可能。
探地雷达探测系统主要由一体化控制主机、天线、电源和配套软件组成,其结构原理如图1 所示[1]。当发射天线以一定的角度向路基和路面发射高频电磁波时,一部分信号反射形成直达波被接收天线接收,另一部分进入道路内部进行传播。当电磁波信号与到介质分层界面或异常病害区域时,部分电磁波将会反射形成目标回播被接收天线接收,其余部分电磁波将继续向下穿透。就这样逐层穿透,逐层反射,最后通过对接收天线接收到的回波信号进行信号处理,形成二维B 扫图像,从而确定公路路基的内部结构以及病害的分布情况。
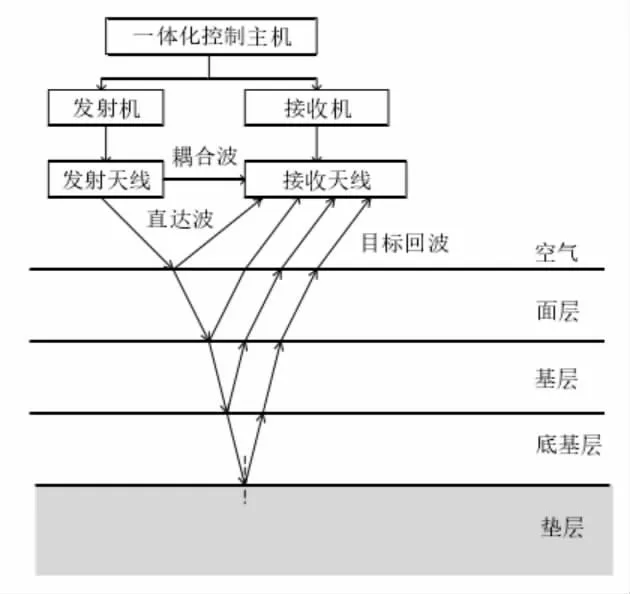
图1 探地雷达检测路基的原理示意图
2 对地下目标信号优化
探地雷达检测地下目标的基本原理是向地下发射高频电磁波,接收反射回波,由于地下目标大多是有耗介质,那么电磁波在传播的过程中不可避免的会出现衰减,这会直接影响到探地雷达的分辨率,但从仪器本身提高探地雷达的分辨率是非常困难的,那么可以通过对探地雷达的信号进行处理来提高探地雷达的分辨率。
短时傅立叶变换、小波变换、S 变换都是最常用于提高探地雷达信号的分辨率的方法。其中S 变换不但具有自适的时频窗、输入长度不受时窗的限制等小波变换的优点,而且其基本小波不用满足容许性条件,它既可以保留住信号的相位信息,同时又能提供变化的时频精度。此外,它还是一种线性变换。在S 变换的基础下,荣霞[2]等学者提出了新的最优广义S 变换对信号优化分辨率更高。

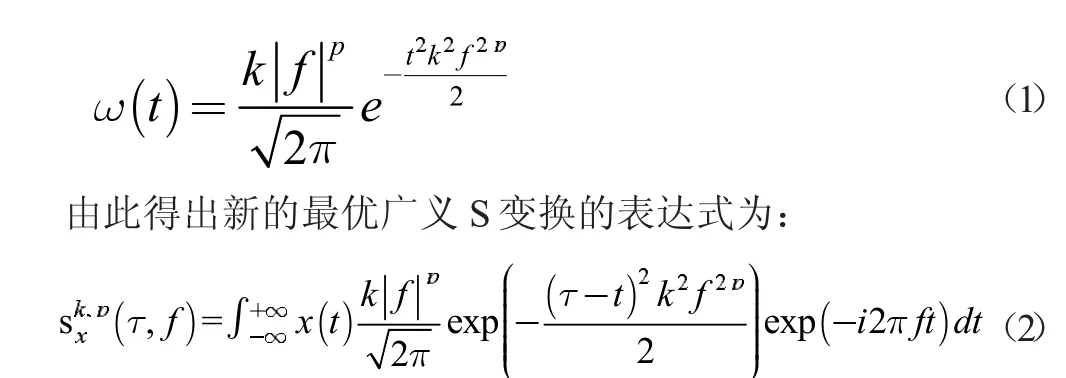
其中,k 为用来调整窗口宽度的调节因子,p 是用来调整窗函数宽度的调节参数。为了获得良好的时频聚集性,需要选择合适的k、p 值。
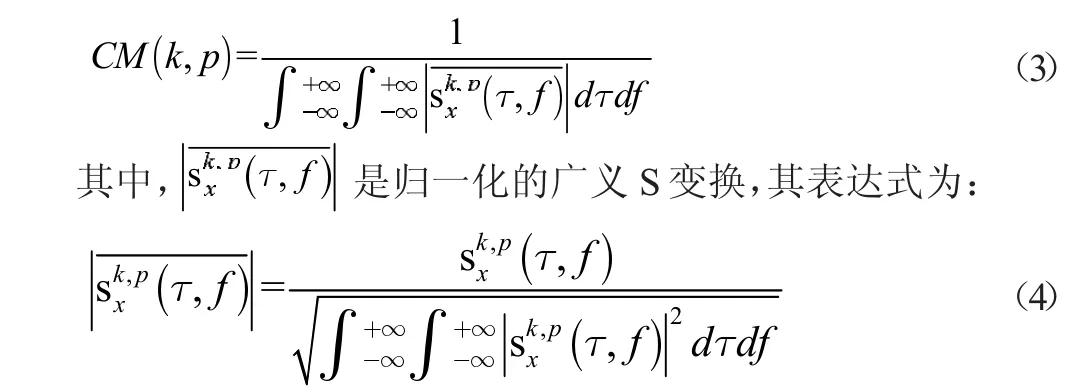
为了对参数进行优化,引入时频聚集度这一概念进行量化分析。文献[3]中提出了利用能量集中度对时频聚集性来进行度量,时频聚集度的定义具体如下:
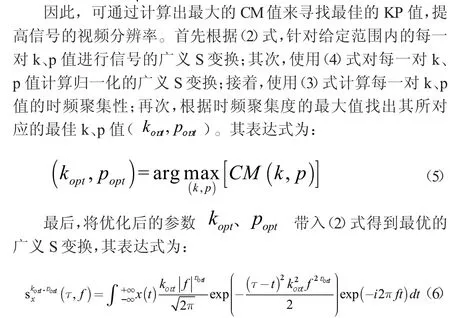
通过,模拟信号和实测探地雷达信号的仿真,结果表明新的最优广义S 变换比短时傅里叶变换和S 变换具有更高的时频分辨率。
3 目标检测
探地雷达利用地下材料的不同电磁特性,通过发射机不断向地下发射高频电磁波信号,接收机接收多道A-Scan 信号,再进行信号处理,生成B-Scan 二维图像。由于地下目标通常在B-Scan 图中呈现出双曲线形态,因而可以将目标检测转化为双曲线图像提取。传统的提取方法一般是采用Hough 变换法或者是最小二乘法用在GPR 目标检测。由于传统方法在数据量过大时,往往需要耗费较多的人力进行输入特征的人工标注,使得解译时长增多,人工经验需求高等问题日益凸显。随着科技的创新和人工智能时代的到来,机器学习和深度学习不断发展,基于卷积神经网络(Convolutional Neural Networks, CNN)的目标检测算法应运而生。
基于CNN 的目标检测算法,可以不需要添加任何人工模型或特征来提取有意义的特征,并能够对包含复杂特性的探地雷达图像进行准确地分类。学者BENGIO[4]提出了一种利用CNN的地雷探测算法,能够无需人工干预,直接从探地雷达图像中学习埋藏目标的特征,并将该方法应用在不同架构的CNN 算法上进行测试,在处理较小的图像块时,均能达到较高分类精度。但由于用来训练模型的GPR 图像的大小和数量都是有限的,大多数算法仅仅实现了分类的步骤, 在目标提取以及曲线拟合方面,缺乏更加有效和精确的算法。因此,还需要进一步进行聚类算法、双曲线拟合算法等处理,用以分割双曲线和定位顶点。以上算法在得到聚类后,利用给出的样本点直接进行曲线拟合。然而这些算法中的待拟合样本点是如何获取的,都没有给出解释,因为不能真正满足大批量的自动化需求[5]。
随着数字图像处理技术的飞速发展,未来GPR 的发展方向必将专注于针对目标检测的深度学习框架。在检测速度以及目标检测的准确性方面可以实现更大的改进,并深入到工程领域的各个方面。
结束语
探地雷达是一种针对地下目标的无损探测设备,在地下无损探测研究方面具有很强的实用性。同时,探地雷达图像处理过程中有关回波信号双曲线提取以及顶点识别也具有非常重要的意义。探地雷达涉及的领域十分广泛,不可以忽视的是,探地雷达的使用以及深入研究推动着时代的发展,探地雷达技术的迅速发展有利于提高我国在高新工程领域的国际地位。相信在未来几十年中,人们对探地雷达技术的发展依旧会保持积极态度并更广泛地使用该技术。
